move_base
1》准备导航所需要的包。
a.ros-indigo-gampping :我们不需要修改包内的东西,所以直接安装可执行文件就好了。
sudo apt-get install ros-indigo-slam-gmapping
b.安装雷达的驱动(我的是robopack),直接将提供的ros驱动包拷贝到工作空间中,
c.安装导航定位包,navigation 进入git:https://github.com/ros-planning/navigation/tree/indigo-devel,下载和自己ros版本匹配的包,解压到自己的工作空间中,
cd ~/catkin_ws
catkin_make
indigo的navigation包会出现一个依赖问题,:Orocos-bfl not found while installing navigation stack ROS indigo + Ubuntu 14.04
解决方法:
rosdep install --from-paths src --ignore-src --rosdistro indigo -y
d.由于导航包在/cmd_val下发布的移动数据加速度会过于不友好,所以我们需要对速度做平滑处理,其实就是控制加速,一般通过滤波即可实现,在此我们采用turtlebot的平滑包即可,
安装平滑包yocs_velocity_smoother,具体的平滑算法和输入切换请自己阅读源码。
apt-get install ros-indigo-yocs-velocity-smoother
所有的包准包好后,我们去准备启动所需的launch文件,首先是机器人地盘的启动文件base_controller.launch:

<launch>
<param name="use_sim_time" value="false" />
<node name="link_laser" pkg="tf" type="static_transform_publisher" args="0.15 0 0.15 0 0 0 base_link laser 50"/>
<node name="link_footprint" pkg="tf" type="static_transform_publisher" args="0 0 0 0 0 0 base_link base_footprint 50"/>
<node pkg="odom_tf_package" type="tf_broadcaster_node" name="serial_send_recevice" output="screen"/>
<include file="$(find odom_tf_package)/launch/include/rplidar_ros.launch.xml">
</include>
<arg name="node_name" value="velocity_smoother"/>
<arg name="nodelet_manager_name" value="nodelet_manager"/>
<arg name="config_file" value="$(find odom_tf_package)/config/yocs_velocity_smoother.yaml"/>
<arg name="raw_cmd_vel_topic" value="cmd_vel"/>
<arg name="smooth_cmd_vel_topic" value="smoother_cmd_vel"/>
<arg name="robot_cmd_vel_topic" value="robot_cmd_vel"/>
<arg name="odom_topic" value="odom"/>
<!-- nodelet manager -->
<node pkg="nodelet" type="nodelet" name="$(arg nodelet_manager_name)" args="manager"/>
<!-- velocity smoother -->
<include file="$(find yocs_velocity_smoother)/launch/velocity_smoother.launch">
<arg name="node_name" value="$(arg node_name)"/>
<arg name="nodelet_manager_name" value="$(arg nodelet_manager_name)"/>
<arg name="config_file" value="$(arg config_file)"/>
<arg name="raw_cmd_vel_topic" value="$(arg raw_cmd_vel_topic)"/>
<arg name="smooth_cmd_vel_topic" value="$(arg smooth_cmd_vel_topic)"/>
<arg name="robot_cmd_vel_topic" value="$(arg robot_cmd_vel_topic)"/>
<arg name="odom_topic" value="$(arg odom_topic)"/>
</include>
</launch>
2.然后去准备建图包的启动文件gmapping.launch
<launch>
<arg name="scan_topic" default="scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" clear_params="true">
<!--because my used rtabmap_ros -->
<param name="odom_frame" value="/odom""/>
<!--param name="odom_frame" value="/base_controller/odom""/-->
<param name="map_update_interval" value="30.0"/>
<!-- Set maxUrange < actual maximum range of the Laser -->
<param name="maxRange" value="5.0"/>
<param name="maxUrange" value="4.5"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="80"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
3,导航包(move_base)和定位(amcl)的启动文件:savvy_amcl.launch
<launch> <param name="use_sim_time" value="false" /> <!-- Set the name of the map yaml file: can be overridden on the command line. -->
<arg name="map" default="map.yaml" /> <!--node name="map_odom" pkg="tf" type="static_transform_publisher" args="0 0 0 0 0 0 map odom 50"/--> <!-- Run the map server with the desired map -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find savvy)/maps/$(arg map)"/> <!-- The move_base node -->
<include file="$(find savvy)/launch/move_base_amcl.launch" /> <!--zxw add Fire up AMCL-->
<include file="$(find savvy)/launch/tb_amcl.launch" /> </launch>
move_base_amcl.launch:
<launch> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find savvy)/config/savvyconfig/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find savvy)/config/savvyconfig/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find savvy)/config/savvyconfig/local_costmap_params.yaml" command="load" />
<rosparam file="$(find savvy)/config/savvyconfig/global_costmap_params.yaml" command="load" />
<rosparam file="$(find savvy)/config/savvyconfig/base_local_planner_params.yaml" command="load" /> <rosparam file="$(find savvy)/config/nav_obstacles_params.yaml" command="load" />
</node> </launch>
tb_amcl.launch:
<launch>
<arg name="use_map_topic" default="false"/>
<arg name="scan_topic" default="scan"/>
<node pkg="amcl" type="amcl" name="amcl" clear_params="true">
<param name="use_map_topic" value="$(arg use_map_topic)"/>
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.2"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.25"/>
<param name="update_min_a" value="0.2"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<!-- Increase tolerance because the computer can get quite busy -->
<param name="transform_tolerance" value="1.0"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
4.导航的配置参数如下:
base_local_planner_params.yaml
controller_frequency: 2.0
recovery_behavior_enabled: false
clearing_rotation_allowed: false TrajectoryPlannerROS:
max_vel_x: 0.3
min_vel_x: 0.05
max_vel_y: 0.0 # zero for a differential drive robot
min_vel_y: 0.0
min_in_place_vel_theta: 0.5
escape_vel: -0.1
acc_lim_x: 2.5
acc_lim_y: 0.0 # zero for a differential drive robot
acc_lim_theta: 3.2 holonomic_robot: false
yaw_goal_tolerance: 0.1 # about 6 degrees
xy_goal_tolerance: 0.15 # 10 cm
latch_xy_goal_tolerance: false
pdist_scale: 0.8
gdist_scale: 0.6
meter_scoring: true heading_lookahead: 0.325
heading_scoring: false
heading_scoring_timestep: 0.8
occdist_scale: 0.1
oscillation_reset_dist: 0.05
publish_cost_grid_pc: false
prune_plan: true sim_time: 2.5
sim_granularity: 0.025
angular_sim_granularity: 0.025
vx_samples: 8
vy_samples: 0 # zero for a differential drive robot
vtheta_samples: 20
dwa: true
simple_attractor: false
costmap_common_params.yaml
obstacle_range: 2.5
raytrace_range: 3.0
robot_radius: 0.30
inflation_radius: 0.15
max_obstacle_height: 0.6
min_obstacle_height: 0.0
observation_sources: scan
scan: {data_type: LaserScan, topic: /scan, marking: true, clearing: true, expected_update_rate: 0}
global_costmap_params.yaml
global_costmap:
global_frame: /map
robot_base_frame: /base_link
update_frequency: 1.0
publish_frequency: 0
static_map: true
rolling_window: false
resolution: 0.01
transform_tolerance: 0.5
map_type: costmap
local_costmap_params.yaml
local_costmap:
global_frame: /odom
robot_base_frame: /base_link
update_frequency: 1.0
publish_frequency: 1.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.01
transform_tolerance: 0.5
map_type: costmap
四,准备好以上所有的启动文件和配置参数后,我们开始创建地图和导航,
1.创建地图:
roslaunch savvy base_controller.launch //启动地盘控制器
roslaunch savvy gmapping.launch
roscd savvy/maps/
rosrun map_server map_saver -f mymap 然后会产生以下地图文件
mymap.pgm mymap.yaml
2.开始导航
roslaunch savvy base_controller.launch //启动地盘控制器
roslaunch savvy savvy_amcl.launch map:=mymap.yaml
rosrun rviz rviz -d `rospack find savvy`/nav_test.rviz
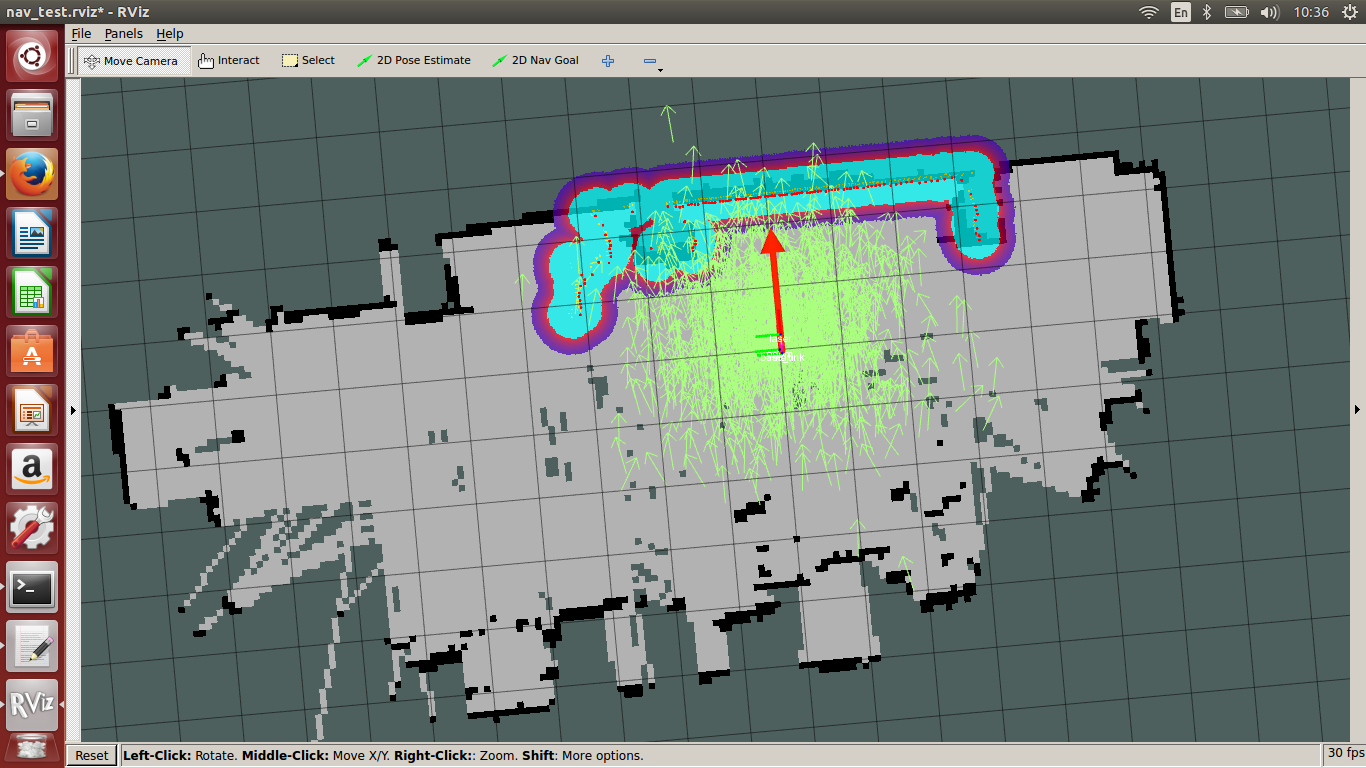
然后指定导航目标,开始自己慢慢玩吧,不过因为我的TF变换主要是里程计更新的,车体打滑或者地盘电机震荡都会积累误差,所以我们必须添加视觉里成计或者闭环检测。
move_base的更多相关文章
- 利用move_base导航--42
摘要: 原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/ 各位博友好长时间又没有写博客了,突然发现上班和在学校是不一样的,在公司的却没有时间写博客了,不过 ...
- 使用move_base导航 ---13
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 我们现在准备用move_base简单的移动机器人记住,一个“pose”在ros的意思是一个位置和 ...
- ROS探索总结(十四)——move_base(路径规划)
在上一篇的博客中,我们一起学习了ROS定位于导航的总体框架,这一篇我们主要研究其中最重要的move_base包. 在总体框架图中可以看到,move_base提供了ROS导航的配置.运行.交互接口,它主 ...
- Navigation包中的move_base和amcl实现自动驾驶
安装功能包: 1.安装导航定位包navigation $ sudo apt-get install ros-indigo-navigation 2.由于导航包在/cmd_val下发布的移动数据加速度会 ...
- move_base代码学习一
System overview move_base 源码 API nav_core BaseGlobalPlanner BaseLocalPlanner RecoveryBehavior Recove ...
- ROS naviagtion analysis: move_base
博客转载自:https://blog.csdn.net/u013158492/article/details/50483123 这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解 ...
- ros move_base costmap 理解和实现动态窗口法避障
以下大部分内容参考自 ros_by_example_hydro_volume_1.pdf local costmap 是怎么生成的?跟三维点云有什么关系? global costmap在没有全局地图下 ...
- gazebo仿真踩坑--rviz中设定机器人的目标位置,move_base后台日志报错
启动仿真环境及各种节点(amcl,move_base,map_server)后,在rviz中设定机器人的目标位置,后台日志报错 [ INFO] [1571974242.864525935, 40.51 ...
- Navigation源码(一) move_base最全解析
一.概述 目测是全网最全的解析,花了几个小时通读并整理的,供大家参考学习. 概况的话可以看下古月居 https://www.guyuehome.com/270,其实它是翻译官方的,英语ok的可以去ro ...
随机推荐
- Network UVA - 315(求割点)
#include <iostream> #include <cstdio> #include <cstring> #include <algorithm> ...
- servlet表单的get和post方法的实现
几经周折,这个简单的小程序终于实现了,全新的编译环境和领域,适应起来有点慢,学习能力还是有待提高 使用IDEA2017.3.3创建简单的servlet程序: 1.创建一个项目 file - new p ...
- Asp.net与office web apps的整合
其实网上有关office web app的整合已经有相关的文章了,典型的是如何整合Office Web Apps至自己开发的系统(一) 和如何整合Office Web Apps至自己开发的系统(二), ...
- Mysql插入、替换和无视
在现实的生产环境下,通常我们都会遇到这样的应用场景,需要我们更新数据.替换数据,若存在则不操作. insert into表示插入数据,数据库会检查主键,如果出现重复会报错: replace into表 ...
- UVA 10480 Sabotage (网络流,最大流,最小割)
UVA 10480 Sabotage (网络流,最大流,最小割) Description The regime of a small but wealthy dictatorship has been ...
- 许仙章鱼TV
http://v.youku.com/v_show/id_XMTY3NTYwNTE4MA==.html?from=s1.8-1-1.2&spm=a2h0k.8191407.0.0 201608 ...
- Linux中的Diff和Patch
本文主要记录两个命令的学习情况:diff 和 patch.diff 和 patch 是一对工具,使用这对工具可以获取更新文件与历史文件的差异,并将更新应用到历史文件上.在数学上说,diff就是对两个集 ...
- Java_JDBC一般写法
JDBC是Java DataBase Connectivity,Java程序访问数据库的标准接口. 如果是maven工程先加入依赖的jar包: <dependency> <group ...
- 私有仓库GitLab快速入门篇
私有仓库GitLab快速入门篇 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 安装文档请参考官网:https://about.gitlab.com/installation/#ce ...
- python自动化运维之路~DAY8
python自动化运维之路~DAY8 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.线程进程介绍 为了方便我们队线程和进程的理解,我们来画2组图,方便我们对python中的线程 ...