Proteus传感器+气体浓度检测的报警方式控制仿真
Proteus传感器+气体浓度检测的报警方式控制仿真
1 实验意义理解
基于前两个实验,我们已经成功的实现:
- 对传感器的数据进行采样、转换
- 拟合采样值
- 对拟合的数据在HDG12864F-1显示屏上显示
似乎,该得到的数据已经拿到了,还能干啥?
是的,我们还能利用数据干一些东西,比如说当这个气体浓度超范围的时候我们怎么去控制解决。
那么就引出了这个实验,怎么控制解决?
其实,我们在平时生活中见到过很多,当气体浓度超过一定范围:
- 报警
- 开警报灯
- 蜂鸣器出警报声音
- 疏通
- 开启风扇通风
- ……
- ……
如上,我们这次实验就是采取了前三个小点的方式来控制解决。
此外,我们还要优化LCD显示,就是在屏幕上显示转动的风扇。
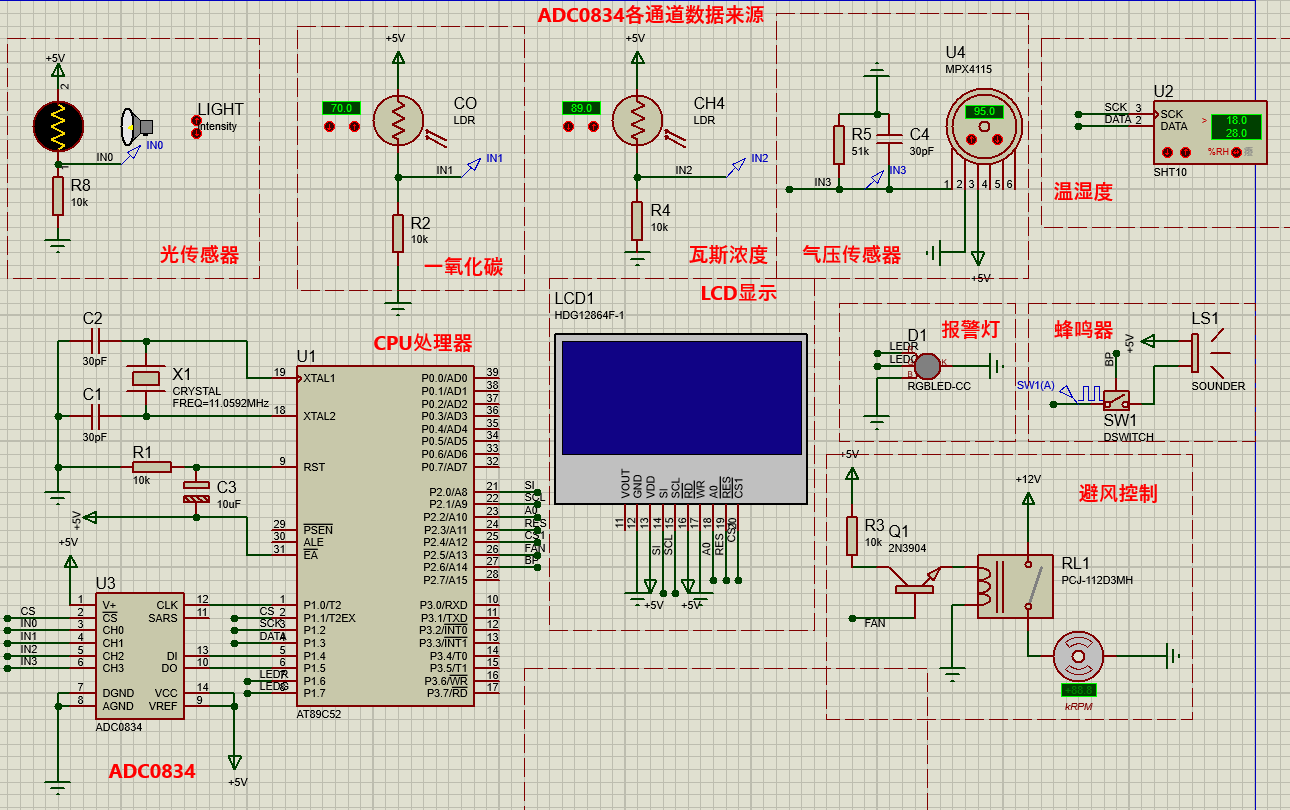
2 主要实验器件
CPU处理器
- AT89C52
LCD显示
- HDG12864F-1
AD转换器
- ADC0834
传感器
- 温湿度:SHT10
- 光传感器:TORCH_LDR
- 瓦斯浓度传感器:LDR
- 一氧化碳浓度传感器:LDR
- 气压传感器:MPX4115
控制相关
- 报警灯:RGBLED-CC
- 蜂鸣器:SOUNDER
- 通风控制:FAN
3 实验参考电路
未运行时
运行时
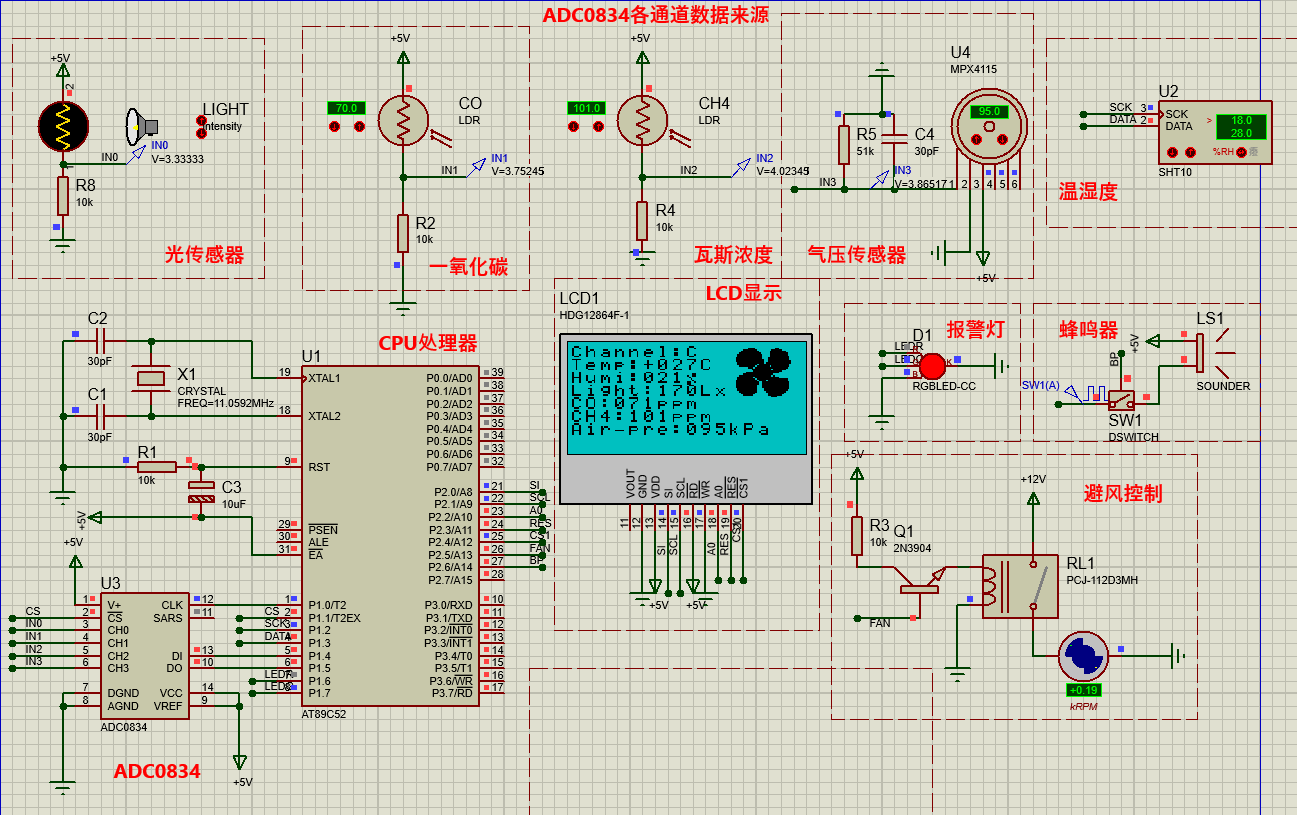
说明
- 有蜂鸣器声音
- 显示中第一行的channel后面的字母会根据当前正在采样转换的通道不同而改变
- 所有数据仅为转换后显示,并未存储下来,若要存储显示,只需要开几个全局变量保存一下即可
4 实验中的问题思考
4.1 实现转动的风扇
要实现这个功能,我们只要知道两个关键点就好了:
- HDG12864F-1液晶显示如果你不对一个像素覆盖写入值,则会保持显示上次写入的值
- 任何动态效果实质上是由一个个静态图画“快速”播放而成的
因此,实现这个就很容易了:
- 找到几个不一样(转动角度不一样)的静态风扇图(最好大小一样,这样方便写入,完全覆盖)
- 对这几个静态风扇图取模
- 调用HDG12864F-1绘制图片函数将一个静态图写入
- 让处理器去干别的事情,比如:执行几句其他的语句,或者直接延时等待
- 调用HDG12864F-1绘制图片函数写入另一个静态图
- ……
那么,中间为什么会有“让处理器去干别的事情,比如:执行几句其他的语句,或者直接延时等待”这一点呢?
其实这是一个控制模拟风扇转动速度的。你想想如果快速切换两张图片,你眼睛还没视觉残留呢,就没了,估计会闪瞎狗眼……所以,选择一个合适的切换时间间隔也是挺重要的……
第二个,这个静态图画至少两幅,这个大家应该很好理解,如果一幅的话,没有变化,换来换去不就那个玩意儿吗……
4.2 控制部分
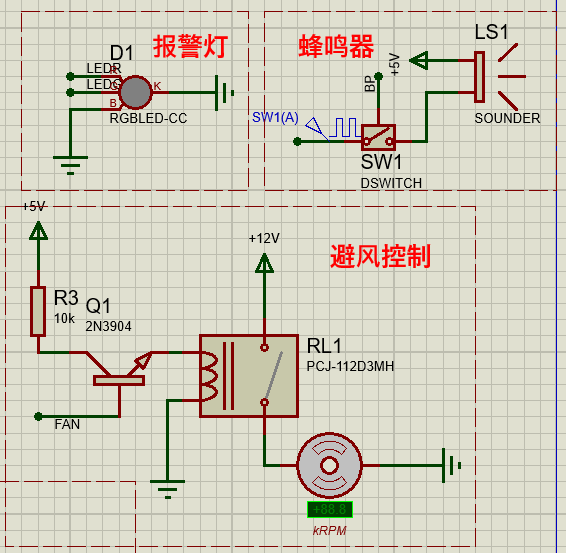
首先,我们来看一下控制部分的原理图:
下面,我们分别说一下各个部分。
报警灯
这个RGBLED-CC要想让它工作,首先就是K端给个低电平。
RGB端,输入1为亮,0为不亮。
然后,在这个实验中,其实我们只需要用到红和绿两种颜色,所以直接给B端接地,然后R和G端分别绑定到处理器的引脚上。
运行中判断,如果达到危险值或者恢复至安全值,则处理器重置相应的引脚值。
蜂鸣器
主要是SOUNDER元件,一端加电压,另一端需要给脉冲信号。
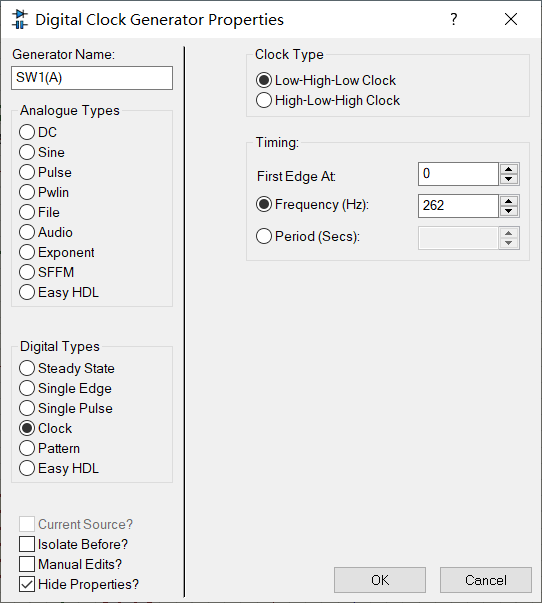
这个脉冲信号很重要,一开始,本菜狗就对这个输入的脉冲信号没有设置(默认频率很小),因此都听不出来发声了……
后来双击输入的SW1(A),调整了一下参数,然后就听到了,可参考下图是我调整的:
当然这里拓展一下,怎么让它放音乐呢??
这里有两段经历让我对这个有了进一步的认识:
大二学校暑假实习的时候,做电子钟,当时用verilog写的,那个如果要让蜂鸣器放出来的不仅仅是那种很难听的一直尖叫,而是播放音乐啊啥的,需要给不同的频率
大三上微机原理课设,使用笔记本内置的芯片,做了一个基于x86的时钟(用的汇编语言写的)。其中,闹钟功能,铃声我想换成音乐怎么办?
- 找到音乐的谱子和对应的音符频率,相对延时
- 分别将频率和延时写成“表”,依次延时输出
这里,再次拓展一下,如果你想听快速版的音乐怎么办?想要听降调,升调的版本怎么办?
- 频率:控制音调
- 延时:控制速度
然后,再说一下,怎么控制这个声音的开关?
这里使用的是DSWITCH元件,可以把它看成一个三态门:
- BP端置为1,接收SW1(A)的输入
- BP端置为0,高阻态,不发声
避风控制
这个模块主要是由FAN+继电器PCJ-112D3MH来实现的,这个我在IC网上也没找到它的DATASHEET,所以,就照着老师的原理图画了之后个人理解了一下。
首先,怎么控制它的开关?
我们可以看到它左边连接了一个NPN型的三极管,主要使用也就是
- FAN置为1,打开电风扇
- FAN置为0,打开电风扇
至于,关于这个型号的三极管的具体功能,还有与PNP类型的三极管有啥区别?
我就上网搜了一下问答,可以参考:NPN与PNP三极管的详解与区别
或许……大家按照上面的写完代码之后发现……为啥我明明程序给它关了,这个仿真的风扇还在转着?!
是我输入的时长不够吗?!FAN=0,FAN=0,FAN=0,FAN=0,……nm(不能爆粗口)还是不对……
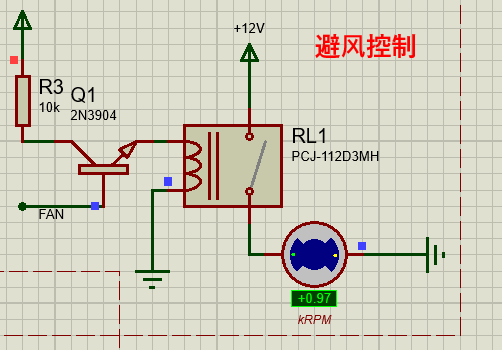
实质上吧,这个风扇的实际停止是根据它下面的显示方框中的数字来决定的。
- 当风扇开启的时候,这个数字会增长;
- 当风扇关闭的时候,这个数字会下降;
- 当为0.00的时候,自己就会停止。
当然,不立即停止也是符合现实生活中的情形的,我认为这主要是因为继电器的问题,这个了解了一下是用来用弱电控制强电的(如果有兴趣的话,大家可以自行去了解)……
当然,这个风扇的具体参数可以双击这个元件之后进去修改。
5 实验参考代码
下面给出参考代码,这里的控制标准是:
- CH4浓度<20,则正常-绿色-风扇关闭-蜂鸣器关闭
- CH4浓度>=20 & <40,则警示-黄色-风扇开启-蜂鸣器关闭
- CH4浓度>=40,则危险-红色-风扇关闭-蜂鸣器开启
#include <reg52.h>
#include <intrins.h>
#include<math.h>
#define NOP _nop_()
#define uint unsigned int
#define uchar unsigned char
#define ACK 1
#define noACK 0
#define DISPLAY_LEFT_TO_RIGHT 1 //从左边数计算列位置,每写完一个字节,列数自动向右移动一个
#define DISPLAY_RIGHT_TO_LEFT 0 //从右边数计算列位置,每写完一个字节,列数自动向左移动一个
//SHT10指令集
//写状态寄存器
#define STATUS_REG_W 0x06
//读状态寄存器
#define STATUS_REG_R 0x07
//温度测量
#define MEASURE_TEMP 0x03
//湿度测量
#define MEASURE_HUMI 0x05
//软复位
#define RESET 0x1E
//枚举选择温度/湿度测量
enum {TEMP,HUMI};
//ADC0834
sbit CS=P1^1;//ADC0834片选信号
sbit CLK=P1^0;//ADC0834时钟信号
//sbit SARS0834=P1^2;//转换状态输出,低电平表示转换完成
sbit DO=P1^5;//ADC0834数据接口
sbit DI=P1^4;//ADC0834通道选择
//HDG12864F-1
sbit cs1 = P2^4;//-cs,片选,低电平有效
sbit rst = P2^3;//-rst,复位,低电平有效
sbit a0 = P2^2;//写命令、写数据控制位。1=Display data; 0=Control data;
sbit scl = P2^1;//Shift clock input,时钟输入
sbit si = P2^0;//Serial data input,串口数据输入
//SHT10
sbit SCK=P1^2;
sbit DATA=P1^3;
//控制相关
sbit LEDR=P1^6;
sbit LEDG=P1^7;
sbit FAN=P2^5;
sbit BP=P2^6;
//ADC
unsigned int temp,humi;
unsigned char ad_res = 0;
unsigned char ad_res1 = 0;
unsigned char ad_res2 = 0;
unsigned char ad_res3 = 0;
unsigned char ad_res4 = 0;
double dat=0.0;
//ADC0834通道切换
unsigned int code channel0834[8]={0,0,1,0,0,1,1,1};
//风扇
uchar code pic_data1[]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x78,0xFC,0xFE,0xFE,0xFE,
0xFE,0xFE,0xFE,0xFC,0xF8,0xF0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0xC0,0xF0,0xFC,0xFC,0xFE,0xFE,0xFE,0xFE,0xFC,0xFC,0xBC,0xE8,0xF7,0xFF,0xFF,
0xFF,0xFF,0xFF,0xEF,0xEF,0xE3,0xF0,0xF0,0xF8,0xFC,0xFC,0xFC,0xF8,0xF0,0xC0,0x00,
0x00,0x01,0x07,0x0F,0x1F,0x1F,0x1F,0x0F,0x07,0x07,0xE3,0xFB,0xFB,0xFF,0xFF,0xFF,
0xFF,0xFF,0xF7,0x8F,0x0E,0x1F,0x1F,0x3F,0x3F,0x3F,0x3F,0x1F,0x0F,0x07,0x01,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x0F,0x0F,0x1F,0x3F,0x3F,0x3F,
0x3F,0x3F,0x3F,0x1F,0x0F,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
};
uchar code pic_data2[]=
{0x00,0x80,0xE0,0xF0,0xF8,0xFC,0xFC,0xFC,0xFE,0xFE,0xFE,0xFE,0xFC,0xF8,0xF0,0xE0,
0x00,0x00,0x00,0x80,0xF8,0xFC,0xFC,0xFE,0xFE,0xFC,0xFC,0xF8,0xF8,0xF0,0xC0,0x00,
0x00,0x03,0x0F,0x1F,0x1F,0x1F,0x1F,0x1F,0x3F,0x3F,0x7F,0xDF,0xEF,0xF7,0xFF,0xFF,
0xFF,0xF8,0xFC,0xFF,0xEF,0xBF,0xFF,0xFF,0xFF,0xFF,0xFF,0x7F,0x7F,0x3F,0x1F,0x06,
0x00,0xE0,0xF8,0xFC,0xFC,0xFE,0xFE,0xFF,0xFF,0xFF,0xFF,0xF7,0xEF,0xDF,0x3F,0x3F,
0xFF,0xFF,0xDF,0xFF,0xFF,0xFB,0xFD,0xF9,0xF9,0xF0,0xF0,0xF0,0xF0,0xF0,0xC0,0x00,
0x00,0x03,0x0F,0x1F,0x3F,0x7F,0x7F,0x7F,0x7F,0x7F,0x7F,0x3F,0x1F,0x00,0x00,0x00,
0x03,0x0F,0x1F,0x7F,0x7F,0xFF,0xFF,0xFF,0x7F,0x7F,0x7F,0x3F,0x1F,0x0F,0x07,0x00,
};
//字符库
uchar code BMP[][6]=
{
//字符显示对应的二维十六进制数组
{0x00,0x00,0x00,0x00,0x00,0x00}, // 0位 显示空白
{0x00,0x00,0x00,0x00,0x00,0x00}, // 1
{0x00,0x00,0x00,0x00,0x00,0x00}, // 2
{0x00,0x00,0x00,0x00,0x00,0x00}, // 3
{0x00,0x00,0x00,0x00,0x00,0x00}, // 4
{0x00,0x00,0x00,0x00,0x00,0x00}, // 5
{0x00,0x00,0x00,0x00,0x00,0x00}, // 6
{0x00,0x00,0x00,0x00,0x00,0x00}, // 7
{0x00,0x00,0x00,0x00,0x00,0x00}, // 8
{0x00,0x00,0x00,0x00,0x00,0x00}, // 9
{0x00,0x00,0x00,0x00,0x00,0x00}, // 10
{0x00,0x00,0x00,0x00,0x00,0x00}, // 11
{0x00,0x00,0x00,0x00,0x00,0x00}, // 12
{0x00,0x00,0x00,0x00,0x00,0x00}, // 13
{0x00,0x00,0x00,0x00,0x00,0x00}, // 14
{0x00,0x00,0x00,0x00,0x00,0x00}, // 15
{0x00,0x00,0x00,0x00,0x00,0x00}, // 16
{0x00,0x00,0x00,0x00,0x00,0x00}, // 17
{0x00,0x00,0x00,0x00,0x00,0x00}, // 18
{0x00,0x00,0x00,0x00,0x00,0x00}, // 19
{0x00,0x00,0x00,0x00,0x00,0x00}, // 20
{0x00,0x00,0x00,0x00,0x00,0x00}, // 21
{0x00,0x00,0x00,0x00,0x00,0x00}, // 22
{0x00,0x00,0x00,0x00,0x00,0x00}, // 23
{0x00,0x00,0x00,0x00,0x00,0x00}, // 24
{0x00,0x00,0x00,0x00,0x00,0x00}, // 25
{0x00,0x00,0x00,0x00,0x00,0x00}, // 26
{0x00,0x00,0x00,0x00,0x00,0x00}, // 27
{0x00,0x00,0x00,0x00,0x00,0x00}, // 28
{0x00,0x00,0x00,0x00,0x00,0x00}, // 29
{0x00,0x00,0x00,0x00,0x00,0x00}, // 30
{0x00,0x00,0x00,0x00,0x00,0x00}, // 31
{0x00,0x00,0x00,0x00,0x00,0x00}, // sp 32
{0x00,0x00,0x2f,0x00,0x00,0x00}, // ! 33
{0x00,0x07,0x00,0x07,0x00,0x00}, // " 34
{0x14,0x7f,0x14,0x7f,0x14,0x00}, // # 35
{0x24,0x2a,0x7f,0x2a,0x12,0x00}, // $ 36
{0xc4,0xc8,0x10,0x26,0x46,0x00}, // % 37
{0x36,0x49,0x55,0x22,0x50,0x00}, // & 38
{0x00,0x05,0x03,0x00,0x00,0x00}, // ' 39
{0x00,0x1c,0x22,0x41,0x00,0x00}, // ( 40
{0x00,0x41,0x22,0x1c,0x00,0x00}, // ) 41
{0x14,0x08,0x3E,0x08,0x14,0x00}, // * 42
{0x08,0x08,0x3E,0x08,0x08,0x00}, // + 43
{0x00,0x00,0x50,0x30,0x00,0x00}, // , 44
{0x10,0x10,0x10,0x10,0x10,0x00}, // - 45
{0x00,0x60,0x60,0x00,0x00,0x00}, // . 46
{0x20,0x10,0x08,0x04,0x02,0x00}, // / 47
{0x3E,0x51,0x49,0x45,0x3E,0x00}, // 0 48
{0x00,0x42,0x7F,0x40,0x00,0x00}, // 1 49
{0x42,0x61,0x51,0x49,0x46,0x00}, // 2 50
{0x21,0x41,0x45,0x4B,0x31,0x00}, // 3 51
{0x18,0x14,0x12,0x7F,0x10,0x00}, // 4 52
{0x27,0x45,0x45,0x45,0x39,0x00}, // 5 53
{0x3C,0x4A,0x49,0x49,0x30,0x00}, // 6 54
{0x01,0x71,0x09,0x05,0x03,0x00}, // 7 55
{0x36,0x49,0x49,0x49,0x36,0x00}, // 8 56
{0x06,0x49,0x49,0x29,0x1E,0x00}, // 9 57
{0x00,0x36,0x36,0x00,0x00,0x00}, // : 58
{0x00,0x56,0x36,0x00,0x00,0x00}, // ; 59
{0x08,0x14,0x22,0x41,0x00,0x00}, // < 60
{0x14,0x14,0x14,0x14,0x14,0x00}, // = 61
{0x00,0x41,0x22,0x14,0x08,0x00}, // > 62
{0x02,0x01,0x51,0x09,0x06,0x00}, // ? 63
{0x32,0x49,0x59,0x51,0x3E,0x00}, // @ 64
{0x7E,0x11,0x11,0x11,0x7E,0x00}, // A 65
{0x7F,0x49,0x49,0x49,0x36,0x00}, // B 66
{0x3E,0x41,0x41,0x41,0x22,0x00}, // C 67
{0x7F,0x41,0x41,0x22,0x1C,0x00}, // D 68
{0x7F,0x49,0x49,0x49,0x41,0x00}, // E 69
{0x7F,0x09,0x09,0x09,0x01,0x00}, // F 70
{0x3E,0x41,0x49,0x49,0x7A,0x00}, // G 71
{0x7F,0x08,0x08,0x08,0x7F,0x00}, // H 72
{0x00,0x41,0x7F,0x41,0x00,0x00}, // I 73
{0x20,0x40,0x41,0x3F,0x01,0x00}, // J 74
{0x7F,0x08,0x14,0x22,0x41,0x00}, // K 75
{0x7F,0x40,0x40,0x40,0x40,0x00}, // L 76
{0x7F,0x02,0x0C,0x02,0x7F,0x00}, // M 77
{0x7F,0x04,0x08,0x10,0x7F,0x00}, // N 78
{0x3E,0x41,0x41,0x41,0x3E,0x00}, // O 79
{0x7F,0x09,0x09,0x09,0x06,0x00}, // P 80
{0x3E,0x41,0x51,0x21,0x5E,0x00}, // Q 81
{0x7F,0x09,0x19,0x29,0x46,0x00}, // R 82
{0x46,0x49,0x49,0x49,0x31,0x00}, // S 83
{0x01,0x01,0x7F,0x01,0x01,0x00}, // T 84
{0x3F,0x40,0x40,0x40,0x3F,0x00}, // U 85
{0x1F,0x20,0x40,0x20,0x1F,0x00}, // V 86
{0x3F,0x40,0x38,0x40,0x3F,0x00}, // W 87
{0x63,0x14,0x08,0x14,0x63,0x00}, // X 88
{0x07,0x08,0x70,0x08,0x07,0x00}, // Y 89
{0x61,0x51,0x49,0x45,0x43,0x00}, // Z 90
{0x00,0x7F,0x41,0x41,0x00,0x00}, // [ 91
{0x55,0x2A,0x55,0x2A,0x55,0x00}, //55 92
{0x00,0x41,0x41,0x7F,0x00,0x00}, // ] 93
{0x04,0x02,0x01,0x02,0x04,0x00}, // ^ 94
{0x40,0x40,0x40,0x40,0x40,0x00}, // _ 95
{0x00,0x01,0x02,0x04,0x00,0x00}, // ' 96
{0x20,0x54,0x54,0x54,0x78,0x00}, // a 97
{0x7F,0x48,0x44,0x44,0x38,0x00}, // b 98
{0x38,0x44,0x44,0x44,0x20,0x00}, // c 99
{0x38,0x44,0x44,0x48,0x7F,0x00}, // d 100
{0x38,0x54,0x54,0x54,0x18,0x00}, // e 101
{0x08,0x7E,0x09,0x01,0x02,0x00}, // f 102
{0x0C,0x52,0x52,0x52,0x3E,0x00}, // g 103
{0x7F,0x08,0x04,0x04,0x78,0x00}, // h 104
{0x00,0x44,0x7D,0x40,0x00,0x00}, // i 105
{0x20,0x40,0x44,0x3D,0x00,0x00}, // j 106
{0x7F,0x10,0x28,0x44,0x00,0x00}, // k 107
{0x00,0x41,0x7F,0x40,0x00,0x00}, // l 108
{0x7C,0x04,0x18,0x04,0x78,0x00}, // m 109
{0x7C,0x08,0x04,0x04,0x78,0x00}, // n 110
{0x38,0x44,0x44,0x44,0x38,0x00}, // o 111
{0x7C,0x14,0x14,0x14,0x08,0x00}, // p 112
{0x08,0x14,0x14,0x18,0x7C,0x00}, // q 113
{0x7C,0x08,0x04,0x04,0x08,0x00}, // r 114
{0x48,0x54,0x54,0x54,0x20,0x00}, // s 115
{0x04,0x3F,0x44,0x40,0x20,0x00}, // t 116
{0x3C,0x40,0x40,0x20,0x7C,0x00}, // u 117
{0x1C,0x20,0x40,0x20,0x1C,0x00}, // v 118
{0x3C,0x40,0x30,0x40,0x3C,0x00}, // w 119
{0x44,0x28,0x10,0x28,0x44,0x00}, // x 120
{0x0C,0x50,0x50,0x50,0x3C,0x00}, // y 121
{0x44,0x64,0x54,0x4C,0x44,0x00}, // z 122
{0xD5,0x01,0x80,0x01,0x80,0xAB}, // <50 123
{0xFF,0x81,0x81,0x81,0x81,0xFF}, //50<= <100 124
{0xFF,0x81,0xBD,0xBD,0x81,0xFF}, //100<= <150 125
{0xFF,0xFF,0xFF,0xFF,0xFF,0xFF}, //>=150 126
{0x00,0x00,0x00,0x00,0x00,0x00} // sp 127
};
unsigned char code myChannel[7]={'C','h','a','n','n','e','l'};
unsigned char code myTemp[4]={'T','e','m','p'};
unsigned char code myHumi[4]={'H','u','m','i'};
unsigned char code myCO[2]={'C','O'};
unsigned char code myCH4[3]={'C','H','4'};
unsigned char code myLight[5]={'L','i','g','h','t'};
unsigned char code myAir[7]={'A','i','r','-','p','r','e'};
unsigned char code **msg[7]={myChannel,myTemp,myHumi,myCO,myCH4,myLight,myAir};
//延时函数
void Delayms(uint x )
{
uint t;
while(x--)
for (t= 0; t<120; t++);
}
//HDG12864F-1
//写命令
void wrt_cmd(unsigned char command)
{
unsigned char i = 8;//8位
cs1 = 0;//片选,低电平有效
a0 = 0;//0=Control data,命令置0
while(i--)
{
scl = 0;
si = (bit) (command & 0x80);//先写高位
scl = 1;//上升沿
command <<= 1;//左移一位
}
scl = 0;
}
//写数据
void wrt_dt(unsigned char data_)
{
unsigned char i = 8;//8位
cs1 = 0;//片选,低电平有效
a0 = 1;//1=Display data,写数据置1
while(i--)
{
scl = 0;
si = (bit) (data_ & 0x80);//先写高位
scl = 1;//上升沿
data_ <<= 1;//左移一位 0
}
scl = 0;
}
//设置列位置,其中参数address:0~127
void HDG12864F1_SetColumnAddress(unsigned char address)
{ //写列要分成两步走,先写高四位,再写低四位
//手册Column Address Set
wrt_cmd(0x10 + (address >> 4 & 0x0f));//C中右移是算术右移,必须&0x0f去掉高4位才能得到正确的结果
wrt_cmd(address & 0x0f);
}
//设置纵向位置,其中参数pageAddress:0~8
void HDG12864F1_SetPageAddress(unsigned char pageAddress)
{ //手册Page Address Set
wrt_cmd(0xb0 + pageAddress);//1011+页码
}
//写数据
void HDG12864F1_WriteData(unsigned char data_)
{
wrt_dt(data_);
}
//设置写的方向:从右向左为正
void HDG12864F1_Direction(unsigned char direction)
{ //手册ADC Select
wrt_cmd(0xa0+direction);
}
//对写好的屏幕内容向上滚屏,滚出上边的部分会从屏幕下边冒出来
void HDG12864F1_SetStartLine(unsigned char line)
{ //参数line取值范围0~63
wrt_cmd(0x40 + line);
}
//写英文字符,数字占上下1个8*6点阵
void HDG12864F1_WriteEnglishChar(unsigned char *pEChar, unsigned char column, unsigned char page)
{
unsigned char i;
HDG12864F1_Direction(DISPLAY_LEFT_TO_RIGHT);//DISPLAY_LEFT_TO_RIGHT是一个宏,值为1,代表从屏幕左侧写入
HDG12864F1_SetColumnAddress(column);//设开始写的横向坐标
HDG12864F1_SetPageAddress(page);//设开始写的纵向Page
for(i=0; i<6; i++)
HDG12864F1_WriteData(*(pEChar + i));//连续写英文
}
//图片32*32
void HDG12864F1_DrawPic(unsigned char *pChar, unsigned char column, unsigned char page)
{
unsigned char i,j;
HDG12864F1_Direction(DISPLAY_LEFT_TO_RIGHT);//DISPLAY_LEFT_TO_RIGHT是一个宏,值为1,代表从屏幕左侧写入
for(i=0;i<4;i++)
{
HDG12864F1_SetColumnAddress(column);//设开始写的横向坐标
HDG12864F1_SetPageAddress(page+i);//设开始写的纵向Page
for(j=0;j<32;j++)
{
HDG12864F1_WriteData(*(pChar + i*32+j));//连续写英文
}
}
}
//ADC0834
unsigned char AD0834_conv(unsigned int n)
{
unsigned char i,com;
CS=1;
CS=0; _nop_(); _nop_();//CS置低,启动转换
DI=1; _nop_(); _nop_();//启动,准备输出数据 第一个脉冲
CLK=1; _nop_(); _nop_();
CLK=0; _nop_(); _nop_();
//选择通道,第二个脉冲
DI=1;
CLK=1; _nop_(); _nop_();
CLK=0; _nop_(); _nop_();
DI=channel0834[n*2];
CLK=1; _nop_(); _nop_();
CLK=0; _nop_(); _nop_();
DI=channel0834[n*2+1];
CLK=1; _nop_(); _nop_();
CLK=0; _nop_(); _nop_();
DI=1;
CLK=1; _nop_(); _nop_();
CLK=0; _nop_(); _nop_();
//开始采集转换数据
for(i=8;i>0;i--)
{
com<<=1;//左移,先采最高位
if(DO)com=com|0x01;//采当前数据
CLK=1;
CLK=0;
_nop_();
_nop_();
}
CS=1;//关闭片选,禁用
return com;
}
//LDR传感器数据拟合
unsigned char ChangeDataLDR(unsigned char res)
{
unsigned char com;
com=0.00000000221308*res*res*res*res*res
-0.0000009287723*res*res*res*res
+ 0.0001465584*res*res*res
- 0.008997464*res*res
+ 0.2657836*res - 0.5918848;
return com;
}
//MPX4115传感器数据拟合
unsigned char ChangeDataMPX(unsigned char res)
{
unsigned char com;
//自己拟合
com=0.436*res+9.053;
return com;
}
//SHT10
//写字节
char s_write_byte(uchar value)
{
uchar i,error=0;
//分别取出指令的对应位串传输
//从高位开始
for(i=0x80;i>0;i>>=1)
{
if(i&value) DATA=1;
else DATA=0;
SCK=1;
//保持SCK高电平
_nop_();_nop_();_nop_();
SCK=0;
}
DATA=1;
SCK=1;
error=DATA;//ACK
_nop_();_nop_();_nop_();
SCK=0;
DATA=1;
return error;
}
//读字节
char s_read_byte(uchar ack)
{
uchar i,val=0;
DATA=1;
//读取一个字节的数据
for(i=0x80;i>0;i>>=1)
{
SCK=1;
if(DATA) val=(val|i);
SCK=0;
}
if(ack==1)DATA=0;//通过下拉DATA为低电平以确认每个字节
else DATA=1; //如果是校验 (ack==0) ,读取完后保持ACK高电平结束通讯
_nop_();_nop_();_nop_(); //pulswith approx. 3 us
SCK=1; //clk #9 for ack
_nop_();_nop_();_nop_(); //pulswith approx. 3 us
SCK=0;
_nop_();_nop_();_nop_(); //pulswith approx. 3 us
DATA=1; //释放DATA-line
return val;
}
//启动传输
void s_transstart(void)
{
DATA=1; SCK=0;
_nop_();
SCK=1;
_nop_();
DATA=0;
_nop_();
SCK=0;
_nop_();_nop_();_nop_();
SCK=1;
_nop_();
DATA=1;
_nop_();
SCK=0;
}
//连接复位
void s_connectionreset(void)
{
//通讯中断需要通讯复位
//DATA保持高电平并触发SCK时钟9次或更多
uchar i;
DATA=1;SCK=0;
for(i=0;i<9;i++)
{
SCK=1;
SCK=0;
}
//发送一个传输启动时序
s_transstart();
//复位串口而状态寄存器内容仍然保留
}
//温湿度测量
char s_measure(uchar *p_value,uchar *p_checksum,uchar mode)
{
unsigned error=0;
unsigned int i;
s_transstart();
switch(mode)
{
case TEMP:
error+=s_write_byte(MEASURE_TEMP); break;
case HUMI:
error+=s_write_byte(MEASURE_HUMI); break;
default: break;
}
//在结束测量后Sensor会把DATA线拉低
//等待测量结束时间根据不同位数的测量不同
for(i=0;i<65535;i++) if(DATA==0) break;//2^16
if(DATA) error+=1;//说明没有结束
//传输2个字节的测量数据和1个字节的CRC奇偶校验
*(p_value)=s_read_byte(ACK);
*(p_value+1)=s_read_byte(ACK);
*p_checksum=s_read_byte(noACK);
return error;
}
//温湿度值标度变换及温度补偿
void calc_sth10(float *p_humidity,float *p_temperature)
{
// input : humi [Ticks] (12 bit)
// temp [Ticks] (14 bit)
// output: humi [%RH]
const float C1=-2.0468; // for 12 Bit
const float C2=+0.0367; // for 12 Bit
const float C3=-0.0000015955; // for 12 Bit
const float T1=+0.01; // for 12 Bit @ 5V
const float T2=+0.00008; // for 12 Bit @ 5V
float rh=*p_humidity;// rh: Humidity [Ticks] 12 Bit
float t=*p_temperature; // t: Temperature [Ticks] 14 Bit
float rh_lin;// rh_lin: Humidity linear
float rh_ture;// rh_true: Temperature compensated humidity
float t_C;// t_C : Temperature [C]
t_C=t*0.01-40;//温度转换[C]
rh_lin=C3*rh*rh+C2*rh+C1;//相对湿度非线性补偿[%RH]
rh_ture=(t_C-25)*(T1+T2*rh)+rh_lin;//湿度信号的温度补偿[%RH]
//超范围处理
if(rh_ture>100) rh_ture=100;
if(rh_ture<0.1) rh_ture=0.1;
//将结果传输回去
*p_temperature=t_C;//[C]
*p_humidity=rh_ture;//[%RH]
}
typedef union
{
unsigned int i;
float f;
}value;
void main(void)
{
int i=0;
int j=0;
int mycol=0;
value humi_val,temp_val;
uchar error;
uchar check_sum;//校验和
int flag;//判断温度符号
BP=0;
FAN=0;
while(1)
{
mycol=0;
for(i=0;i<7;i++)
HDG12864F1_WriteEnglishChar(BMP[myChannel[i]],i*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[':'],7*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['A'],8*8,mycol);
mycol=mycol+1;
//温湿度
error=0;
error+=s_measure((uchar*)&humi_val.i,&check_sum,HUMI);
error+=s_measure((uchar*)&temp_val.i,&check_sum,TEMP);
if(error!=0)//说明通讯中断且没有测量完
s_connectionreset();
else//已经测量完
{
humi_val.f=(float)humi_val.i;
temp_val.f=(float)temp_val.i;
//温湿度补偿
calc_sth10(&humi_val.f,&temp_val.f);
//判断符号
if(temp_val.f<0)
{
flag='-';
temp_val.f=-temp_val.f+2;
}
else
flag='+';
//可以显示小数位后一位
temp=temp_val.f*10;
humi=humi_val.f*10;
}
//温度
for(i=0;i<4;i++)
HDG12864F1_WriteEnglishChar(BMP[myTemp[i]],i*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[':'],4*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[flag],5*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[temp/1000+'0'],6*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[temp%1000/100+'0'],7*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[temp%100/10+'0'],8*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['C'],9*8,mycol);
mycol=mycol+1;
//湿度
for(i=0;i<4;i++)
HDG12864F1_WriteEnglishChar(BMP[myHumi[i]],i*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[':'],4*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[humi/1000+'0'],5*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[humi%1000/100+'0'],6*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[humi%100/10+'0'],7*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['%'],8*8,mycol);
mycol=mycol+1;
ad_res=AD0834_conv(0);
ad_res1=ad_res;
for(i=0;i<5;i++)
HDG12864F1_WriteEnglishChar(BMP[myLight[i]],i*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[':'],5*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res1%1000/100+'0'],6*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res1%100/10+'0'],7*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res1%10+'0'],8*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['L'],9*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['x'],10*8,mycol);
mycol=mycol+1;
ad_res=AD0834_conv(1);
ad_res2=ChangeDataLDR(ad_res);
for(i=0;i<2;i++)
HDG12864F1_WriteEnglishChar(BMP[myCO[i]],i*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[':'],2*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res2%1000/100+'0'],3*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res2%100/10+'0'],4*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res2%10+'0'],5*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['p'],6*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['p'],7*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['m'],8*8,mycol);
mycol=mycol+1;
ad_res=AD0834_conv(2);
ad_res3=ChangeDataLDR(ad_res);
//控制RGB-LED与BP与FAN
if(ad_res3<20)//正常-绿色-风扇关闭-蜂鸣器关闭
{
LEDR=0;
LEDG=1;
BP=0;
FAN=0;
}
else if(ad_res3>=20 & ad_res3<40)//警示-黄色-风扇开启-蜂鸣器关闭
{
LEDR=1;
LEDG=1;
BP=0;
FAN=1;
}
else//危险-红色-风扇关闭-蜂鸣器开启
{
LEDR=1;
LEDG=0;
BP=1;
FAN=0;
}
for(i=0;i<3;i++)
HDG12864F1_WriteEnglishChar(BMP[myCH4[i]],i*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[':'],3*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res3%1000/100+'0'],4*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res3%100/10+'0'],5*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res3%10+'0'],6*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['p'],7*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['p'],8*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['m'],9*8,mycol);
mycol=mycol+1;
ad_res=AD0834_conv(3);
ad_res4=ChangeDataMPX(ad_res);
for(i=0;i<7;i++)
HDG12864F1_WriteEnglishChar(BMP[myAir[i]],i*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[':'],7*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res4%1000/100+'0'],8*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res4%100/10+'0'],9*8,mycol);
HDG12864F1_WriteEnglishChar(BMP[ad_res4%10+'0'],10*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['k'],11*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['P'],12*8,mycol);
HDG12864F1_WriteEnglishChar(BMP['a'],13*8,mycol);
//转动的风扇
HDG12864F1_DrawPic(&pic_data1,90,0);
Delayms(800);//延时显示
HDG12864F1_DrawPic(&pic_data2,90,0);
Delayms(700);//延时显示
}
}
其中,HDG12864F-1部分的程序是参考:使用Proteus模拟操作HDG12864F-1液晶屏
Proteus传感器+气体浓度检测的报警方式控制仿真的更多相关文章
- 第44章 MPU6050传感器—姿态检测—零死角玩转STM32-F429系列
第44章 MPU6050传感器—姿态检测 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.co ...
- 阿里 Goldeneye 四个环节落地智能监控:预测、检测、报警及定位
阿里 Goldeneye 四个环节落地智能监控:预测.检测.报警及定位 https://www.infoq.cn/article/alibaba-goldeneye-four-links
- zabbix 报警方式之 微信公众号报警(5)
一.条件 首先你得有一个微信公众号,并且是可以有发送消息的接口.然后你得有个脚本去调用微信的api. 这里感谢一下微信.使我们运维人员的报警方式多了一种... (同事们不要怪我哈.) 之后可以参考下z ...
- zabbix 报警方式之 邮件报警(4)
一.为什么要自定义邮件脚本报警? 灵活,方便.可以自定义过滤信息. 下面是使用不同方式的邮件报警,一个是利用sendEmail程序来发送报警邮件,第二个是利用python脚本来发送邮件. 二.send ...
- vue 多种方式控制style属性
一共用到了两种方式: 第一种:对象 第二种:数组 看代码: <!doctype html> <html lang="en"> <head> &l ...
- Sentinel基本使用--基于QPS流量控制(二), 采用Warm Up预热/冷启动方式控制突增流量
Sentinel基本使用--基于QPS流量控制(二), 采用Warm Up预热/冷启动方式控制突增流量 2019年02月18日 23:52:37 xiongxianze 阅读数 398更多 分类专栏: ...
- CAN总线简介:如何以编程方式控制汽车
最近,我正与Voyage公司的朋友合作研究,以实现福特Fusion空调系统(A/C)的编程控制.目前,Voyage公司正努力打造自动驾驶的终极目标:能够以低廉的价格成本和广泛的投放范围,把世界任何地方 ...
- P2P NAT检测和穿越方式
一. NAT类型 本文转自:http://www.cnblogs.com/hummersofdie/archive/2013/05/21/3090163.html 1.基本的NAT类型:只 ...
- 三相异步电动机过载保护及报警PLC控制
一.项目所需设备.工具.材料 见表7-1. 表7-1 项目所需设备.工具.材料 二. 训练内容: 1.项目描述 试设计一电动机过载保护程序,要求电动机过载时能自动停止运转,同时发出10秒钟的声光报 ...
随机推荐
- 津津的储蓄计划 NOIp提高组2004
这个题目当年困扰了我许久,现在来反思一下 本文为博客园ShyButHandsome的原创作品,转载请注明出处 右边有目录,方便快速浏览 题目描述 津津的零花钱一直都是自己管理.每个月的月初妈妈给津津\ ...
- linux下DNS服务器搭建,正反向解析配置
dns服务器之前自己搭建玩过,一段时间不搞,加上当时没写文档,基本忘光光了,这次老实了,写个文档记下来,方便以后查阅. 1.服务器准备 为了避免不必要的问题,关闭防火墙,关闭selinux,hosts ...
- 牛客练习赛61 相似的子串(二分+Hash)
题面在此 题解:将字符串分成k部分,然后求最长前缀,所以我们只关注前缀部分就好了,公共前缀后边的是啥不用管,那么问题就转化成了是否存在k个不相交的字符串的最长公共前缀问题.首先用Hash来记录一下字符 ...
- C++学习--编译优化
常量折叠 把常量表达式的值求出来作为常量嵌在最终生成的代码中. 疑问:对于一个很复杂的常量表达式,编译器会算出结果再编译吗?亦或者是把这个表达式完全翻译成机器码,最终留给程序去解决? 分情况: 涉及的 ...
- Cucumber(3)——命令以及日志
目录 回顾 基本执行命令 关于日志的生成 回顾 在上一节中,我介绍了cucumber一些基本的语法内容,如果你还没有进行相关的了解或者环境的配置,你可以点击这里来进行了解一下 在本节中,我会对cucu ...
- 调用sleep后,我做了一个噩梦
sleep系统调用 我是一个线程,生活在Linux帝国.一直以来辛勤工作,日子过得平平淡淡,可今天早上发生了一件事让我回想起来都后怕. 早上,我还是如往常一样执行着人类编写的代码指令,不多时走到了一个 ...
- redis: Zset有序集合类型(七)
存值:zadd myset 1 one 取值:zrange myset 0 -1 127.0.0.1:6379> zadd myset 1 one #存值 分值为1 (integer) 1 12 ...
- 新增记录txt文档
StringBuilder s = new StringBuilder(); s.Append("[" + dt.Rows[i]["Store"].Conver ...
- C语言指定初始化器解析及其应用
指定初始化器的概念 C90 标准要求初始化程序中的元素以固定的顺序出现,与要初始化的数组或结构体中的元素顺序相同.但是在新标准 C99 中,增加了一个新的特性:指定初始化器.利用该特性可以初始化指定的 ...
- 百度云BCH配置说明
百度云虚拟空间(BCH) 来源:https://www.cnblogs.com/llll/p/7930029.html 参考资料:https://cloud.baidu.com/doc/BCH/Ge ...