teb_local_planner安装及使用
teb_local_planner的详尽资料(包括安装及导航,参数调节等)请参考其ros官方文档:http://wiki.ros.org/teb_local_planner和http://wiki.ros.org/teb_local_planner/Tutorials。
teb_local_planner的github源码:https://github.com/rst-tu-dortmund/teb_local_planner。
一、作用机制
teb_local_planner将navigation里的base_local_planner替换,故其作用机制和base_local_planner一样为ros的plugin机制。plugin的使用可以参考:http://www.cnblogs.com/W-chocolate/p/4328725.html。
二、teb_local_planner的安装步骤如下(注意ros为kenetic版):
1、安装依赖:
rosdep install teb_local_planner
2、从github上下载源码:https://github.com/rst-tu-dortmund/teb_local_planner
3、放入工作空间的/src文件夹中
4、catkin_make -DCATKIN_WHITELIST_PACKAGES=“源码存放的文件夹名字”(单独编译teb_local_planner)
5、查看teb_local_planner的plugin是否安装完成
rospack plugins --attrib=plugin nav_core
如果能查询到teb_local_planner,则表明以及准备就绪。
值得一提的是,teb_local_planner源码中关于plugin的配置文件均已写好,直接编译源码就能完成plugin的注册及插入,非常方便。
三、使用
1、新建teb_local_planner配置文件teb_local_planner_params.yaml
在此我偷了个懒,直接从tutorials中下载:
git clone https://github.com/rst-tu-dortmund/teb_local_planner_tutorials.git
在/cfg中找到所需的teb_local_planner_params.yaml。由于使用机器人odom为差动模式的,故选取diff_drive中的。
2、将teb_local_planner_params.yaml和navigation中其他的配置文件(如costmap_common_params.yaml等)放在一起,方便查阅调用。个人习惯如此,也可以不放在一起。
3、在启动navigation的launch文件中load上述配置文件
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
...
<rosparam file="$(find my_robot_name_2dnav)/base_local_planner_params.yaml" command="load" />
...
</node>
4、在启动navigation的launch文件中声明base_local_planner采用先前注册的plugin
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
...
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
...
</node>
当然也可以选择在move_base_params.yaml中声明。
5、启动navigation,在rviz中将三条path调出来,即可观察机器人导航过程中规划路径的变化。
此外,可以通过rosrun rqt_reconfigure rqt_reconfigure动态调节参数使机器人导航性能达到最佳。关于参数调节的方法请参考其ros官方文档。实际使用的经历来看,采用从teb_local_planner_tutorials下载下来的默认参数达到的性能已经远优于原始navigation中的路径规划算法的性能。我认为teb_local_planner的应用价值非常大。
四、异常处理
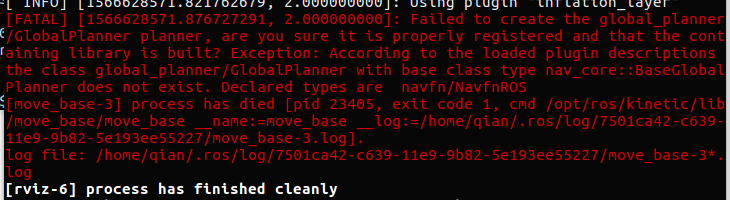
原因是相关库没有安装好,根据提示把库安装好就可以使用了。
解决办法,比较懒,没有一个个试试,所以直接都安装了,有兴趣的小伙伴可以尝试分部分,O(∩_∩)O哈哈~
sudo apt install ros-kinetic-mbf-costmap-core ros-kinetic-mbf-costmap-nav ros-kinetic-move-base-flex ros-kinetic-move-base-to-manip ros-kinetic-moveit-kinematics ros-kinetic-moveit-ros-manipulation ros-kinetic-moveit-ros-move-group ros-kinetic-moveit-ros-perception ros-kinetic-moveit-ros-planning ros-kinetic-moveit-ros-planning-interface ros-kinetic-moveit-ros-warehouse ros-kinetic-assisted-teleop ros-kinetic-carrot-planner ros-kinetic-dwa-local-planner ros-kinetic-global-planner ros-kinetic-goal-passer ros-kinetic-move-slow-and-clear ros-kinetic-navigation ros-kinetic-navigation-experimental ros-kinetic-navigation-layers ros-kinetic-navigation-stage ros-kinetic-navigation-tutorials ros-kinetic-pose-follower ros-kinetic-range-sensor-layer ros-kinetic-roomba-stage ros-kinetic-sbpl-lattice-planner ros-kinetic-sbpl-recovery ros-kinetic-social-navigation-layers ros-kinetic-twist-recovery ros-kinetic-assisted-teleop ros-kinetic-carrot-planner ros-kinetic-dwa-local-planner ros-kinetic-global-planner ros-kinetic-goal-passer ros-kinetic-move-slow-and-clear ros-kinetic-navigation ros-kinetic-navigation-experimental ros-kinetic-navigation-layers ros-kinetic-navigation-stage ros-kinetic-navigation-tutorials ros-kinetic-pose-follower ros-kinetic-range-sensor-layer ros-kinetic-roomba-stage ros-kinetic-sbpl-lattice-planner ros-kinetic-sbpl-recovery ros-kinetic-social-navigation-layers ros-kinetic-twist-recovery ros-kinetic-assisted-teleop ros-kinetic-carrot-planner ros-kinetic-dwa-local-planner ros-kinetic-global-planner ros-kinetic-goal-passer ros-kinetic-move-slow-and-clear ros-kinetic-navigation ros-kinetic-navigation-experimental ros-kinetic-navigation-layers ros-kinetic-navigation-stage ros-kinetic-navigation-tutorials ros-kinetic-pose-follower ros-kinetic-range-sensor-layer ros-kinetic-roomba-stage ros-kinetic-sbpl-lattice-planner ros-kinetic-sbpl-recovery ros-kinetic-social-navigation-layers ros-kinetic-twist-recovery ros-kinetic-cost-map ros-kinetic-cost-map-demos ros-kinetic-cost-map-ros ros-kinetic-cost-map-visualisations ros-kinetic-costmap-prohibition-layer ros-kinetic-grid-map-costmap-2d ros-kinetic-grid-map-cv ros-kinetic-grid-map-ros ros-kinetic-grid-map-visualization
teb_local_planner安装及使用的更多相关文章
- docker——容器安装tomcat
写在前面: 继续docker的学习,学习了docker的基本常用命令之后,我在docker上安装jdk,tomcat两个基本的java web工具,这里对操作流程记录一下. 软件准备: 1.jdk-7 ...
- 网络原因导致 npm 软件包 node-sass / gulp-sass 安装失败的处理办法
如果你正在构建一个基于 gulp 的前端自动化开发环境,那么极有可能会用到 gulp-sass ,由于网络原因你可能会安装失败,因为安装过程中部分细节会到亚马逊云服务器上获取文件.本文主要讨论在不变更 ...
- Sublime Text3安装JsHint
介绍 Sublime Text3使用jshint依赖Nodejs,SublimeLinter和Sublimelinter-jshint. NodeJs的安装省略. 安装SublimeLinter Su ...
- Fabio 安装和简单使用
Fabio(Go 语言):https://github.com/eBay/fabio Fabio 是一个快速.现代.zero-conf 负载均衡 HTTP(S) 路由器,用于部署 Consul 管理的 ...
- gentoo 安装
加载完光驱后 1进行ping命令查看网络是否通畅 2设置硬盘的标识为GPT(主要用于64位且启动模式为UEFI,还有一个是MBR,主要用于32位且启动模式为bois) parted -a optima ...
- Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part3:db安装和升级
Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part3:db安装和升级 环境:OEL 5.7 + Oracle 10.2.0.5 RAC 5.安装Database软件 5. ...
- Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part1:准备工作
Linux平台 Oracle 10gR2(10.2.0.5)RAC安装 Part1:准备工作 环境:OEL 5.7 + Oracle 10.2.0.5 RAC 1.实施前准备工作 1.1 服务器安装操 ...
- 【原】nodejs全局安装和本地安装的区别
来微信支付有2年多了,从2年前的互联网模式转变为O2O模式,主要的场景是跟线下的商户去打交道,不像以往的互联网模式,有产品经理提需求,我们帮忙去解决问题. 转型后是这样的,团队成员更多需要去寻找业务的 ...
- tLinux 2.2下安装Mono 4.8
Tlinux2.2发行版基于CentOS 7.2.1511研发而成,内核版本与Tlinux2.0发行版保持完全一致,更加稳定,并保持对Tlinux2.0的完全兼容.Mono 4版本要求CentOS 7 ...
随机推荐
- angularJS select下拉框检测改变
html:(已引入amazeUI) <div style="width:70px;display:inline-block;"> <form class=&quo ...
- linux指令【参考鸟哥的Linux私房菜】
date指令 显示日期 cal指令 显示日历 bc 计算器 scale+number 显示几位小数 quit退出bc tab键 命令提示 入输入ca,按下tab键,会将所有ca的指令全部 ...
- python redis 批量设置过期key
在使用 Redis.Codis 时,我们经常需要做一些批量操作,通过连接数据库批量对 key 进行操作: 关于未过期: 1.常有大批量的key未设置过期,导致内存一直暴增 2.rd需求 扫描出这些ke ...
- 在DELPHI中显示GIF动画
想没想过在DELPHI中显示GIF动画?Delphi的用户是非常幸运的,因为有免费控件可以使用.最著名的控件是Anders Melander编写的TGifImage,并提供完整的源程序.它原来的主页是 ...
- sqoop的导入|Hive|Hbase
导入数据(集群为对象) 在Sqoop中“导入”概念指:从非大数据集群(RDBMS)向大数据集群(HDFS,HIVE,HBASE)中传输数据,叫做:导入,即使用import关键字. 1 RDBMS到HD ...
- NX二次开发-UFUN重命名图纸页UF_DRAW_rename_drawing
#include <uf.h> #include <uf_draw.h> #include <uf_drf.h> #include <uf_obj.h> ...
- hdu多校第十场 1003 (hdu6693) Valentine's Day 贪心/概率
题意: 有许多物品,每个物品有一定概率让女朋友开心.你想让女朋友开心且只开心一次,让你挑一些物品,使得这个只开心一次的概率最大,求最大概率. 题解: 设物品i让女朋友开心的概率为$p_i$ 若你挑选了 ...
- O(n)线性时间求解第k大-HDU6040-CSU2078
目录 目录 思路 (有任何问题欢迎留言或私聊 && 欢迎交流讨论哦 目录 HDU6040:传送门 \(m(m\leq 100)\)次查询长度为\(n(n \leq 1e7)\)区间的 ...
- CSS3:CSS3 边框
ylbtech-CSS3:CSS3 边框 1.返回顶部 1. CSS3 边框 CSS3 边框 用 CSS3,你可以创建圆角边框,添加阴影框,并作为边界的形象而不使用设计程序,如 Photoshop. ...
- 关于pycharm总是以测试的形式运行程序(nosetest)
由于各种原因,pycharm有test字段,或者有test的函数时,会莫名奇妙的进入test模式,有时候怎么也跳不出来,害我花了半天时间,坑. 解决办法:直接在菜单栏找Run,选择不带test的进行运 ...