TF坐标变换
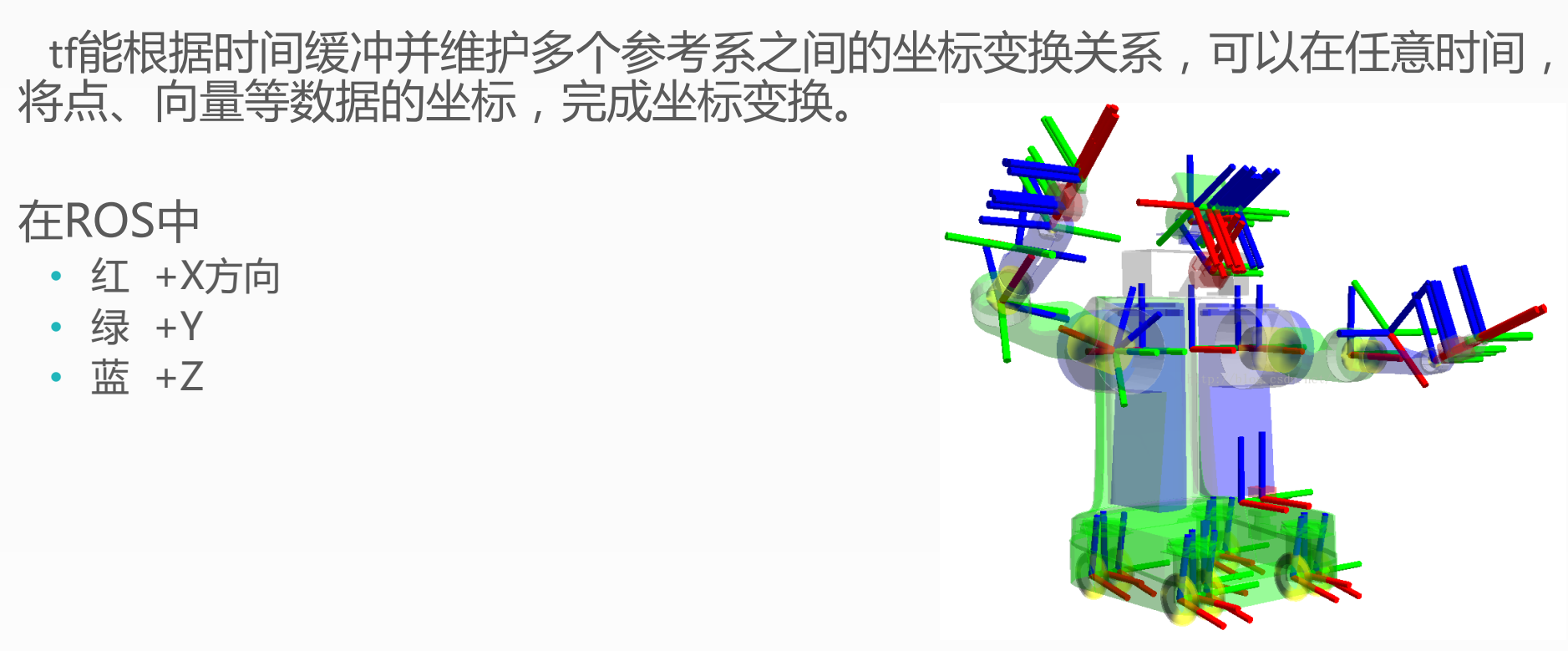
一、什么是TF
二、TF使用方法 
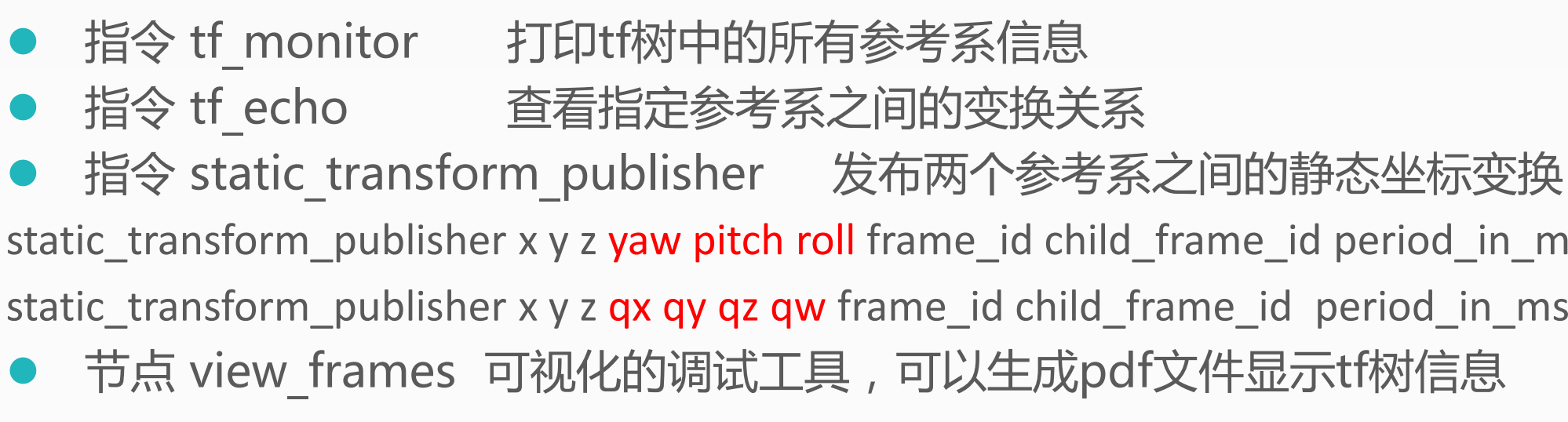
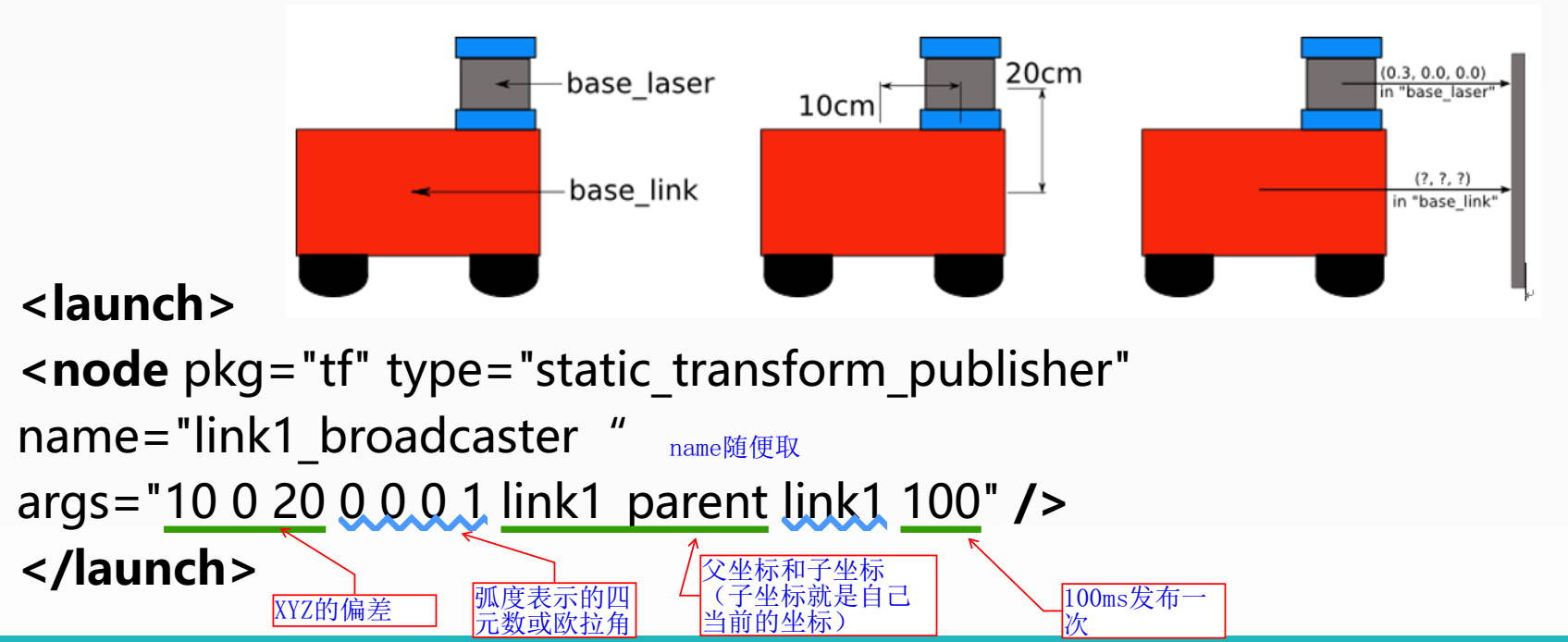
三、TF包内的指令工具
四、相关API

1、广播变换
发布坐标之间的坐标关系
#include <ros/ros.h>
#include <tf/transform_broadcaster.h> int main(int argc, char** argv)
{
ros::init(argc, argv, "robot_tf_publisher");
ros::NodeHandle n; ros::Rate r(); tf::TransformBroadcaster broadcaster; while(n.ok()){ //发布坐标变换
broadcaster.sendTransform(tf::StampedTransform(tf::Transform(
tf::Quaternion(, , , ), //四元数
tf::Vector3(-0.25, 0.0, 0.0)),
ros::Time::now(),
"base_link",
"laser"));
r.sleep();
}
}
2、使用变换
通过监听到上面发布的坐标变换,把坐标中的一个点变换到另一个坐标中的坐标
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h> //我们将创建一个函数,给定一个TransformListener,在“base_laser”坐标系中取一点,并将其转换为“base_link”坐标系。
// 这个函数将作为在我们程序的main()中创建的ros::Timer的回调,并且每秒都会触发。
void transformPoint(const tf::TransformListener& listener){
//we'll create a point in the base_laser frame that we'd like to transform to the base_link frame
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "base_laser"; //we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time();//时间戳 //just an arbitrary point in space
laser_point.point.x = 1.0;
laser_point.point.y = 0.2;
laser_point.point.z = 0.0; try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);//坐标中的点的位置变换 ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());
}
} int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n; //我们需要创建一个tf::TransformListener。一个TransformListener对象自动订阅了ROS变换消息主题和管理所有将在网络中广播的变换数据。
tf::TransformListener listener(ros::Duration()); //we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener))); ros::spin(); }
wiki.ros.org/tf/Overview
http://wiki.ros.org/cn/tf/Tutorials
https://www.ncnynl.com/archives/201708/1881.html
TF坐标变换的更多相关文章
- ROS零门槛学渣教程系列前言
为什么选择ROS: 1.ROS是开放源码的,在该平台上可以找到非常很多免费开源的代码包,并且这些例程还带wiki说明文档: 2.机器人领域最新的算法直接支持ROS,简单几个步骤就能运行: 3.ROS工 ...
- ROS导航包的介绍
博客转载自:https://blog.csdn.net/handsome_for_kill/article/details/53130707#t3 ROS导航包的应用 利用ROS Navigation ...
- ROS机器人导航一 : 从英雄联盟到ROS导航
写在前面: 这是这个系列的第一篇 本系列主要从零开始深入探索ROS(机器人操作系统)的导航和规划. 这个系列的目标,是让大家了解: 1.ROS的导航是怎么实现的 2.认识ROS里各种已有的导航算法,清 ...
- Ros入门21讲
一.ROS是什么? ROS=通信机制+开发工具+应用功能+生态系统 目的:提高机器人研发中的软件复用率. 1.ROS中的通信机制 松耦合分布式通信: 注意:什么是耦合.紧耦合.松耦合? 1.1 耦合 ...
- ROS探索总结(十八)——重读tf
在之前的博客中,有讲解tf的相关内容,本篇博客重新整理了tf的介绍和学习内容,对tf的认识会更加系统. 1 tf简介 1.1 什么是tf tf是一个让用户随时间跟踪多个参考系的功能包,它使用一种树型数 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- tf变换(1)
TF库的目的是实现系统中任一个点在所有坐标系之间的坐标变换,也就是说,只要给定一个坐标系下的一个点的坐标,就能获得这个点在其他坐标系的坐标. 使用tf功能包,a. 监听tf变换: 接收并缓存系统中发布 ...
- tf一些理解(根据资料)
首先看了开源操作机器人系统-ros这本书(张建伟)第五章slam导航 5.1使用tf配置机器人 还有ros navigation 教程 http://wiki.ros.org/navigation/T ...
- 在ros下使用tf
tf真是一个好东西,把坐标变换都简化了 首先tf需要有一个broadcaster #include <ros/ros.h> #include <tf/transform_broadc ...
随机推荐
- CVE-2019-0708简单复现
各文件对应位置 rdp.rb -> /usr/share/metasploit-framework/lib/msf/core/exploit/rdp.rb rdp_scanner.rb -> ...
- windows下安装sass,以及常见错误和解决办法
简介: sass依赖于ruby环境,安装sass之前得先装ruby. 1.安装ruby 1.1.下载地址:http://rubyinstaller.org/downloads 1.2.注意事项:安装时 ...
- python学习8—函数之高阶函数与内置函数
python学习8—函数之高阶函数与内置函数 1. 高阶函数 a. map()函数 对第二个输入的参数进行第一个输入的参数指定的操作.map()函数的返回值是一个迭代器,只可以迭代一次,迭代过后会被释 ...
- iOS进阶二-KVC
概述 KVC的全程是Key-Value Coding, 俗称"键值编码",可以通过一个key来访问属性 常见的AP有 - (void)setValue:(nullable id)v ...
- 2018-12-25-C#-7.2-通过-in-和-readonly-struct-减少方法值复制提高性能
title author date CreateTime categories C# 7.2 通过 in 和 readonly struct 减少方法值复制提高性能 lindexi 2018-12-2 ...
- Leetcode973. K Closest Points to Origin最接近原点的K个点
我们有一个由平面上的点组成的列表 points.需要从中找出 K 个距离原点 (0, 0) 最近的点. (这里,平面上两点之间的距离是欧几里德距离.) 你可以按任何顺序返回答案.除了点坐标的顺序之外, ...
- boost multi_index 插入返回值
boost multi_index 对象插入函数emplace() 的返回值,是一个std::pair<iterator, bool>该pair 的first 是一个插入成功的位置,第二个 ...
- css---6伪元素选择器
after :在内容后边 <!DOCTYPE html> <html lang="en"> <head> & ...
- java String,StringBuilder和StringBuffer类的区别
对String而言: String是只读字符串,所引用的字符串不能被改变,一经定义,无法再增删改. String 定义的字符串保存在常量池里面,进行+操作时不能直接在原有基础上拼接. 每次+操作 : ...
- redis和ehcache的区别,存储方式(各属于内存还是外存)
ehcache属于内存存储,redis的缓存属于内存存储,redis的持久文件属于外存存储: redis是通过socket访问到缓存服务,效率比ecache低,比数据库要快很多,处理集群和分布式缓存方 ...