每天进步一点点------SOPC的Avalon-MM IP核(二) AVALON总线的IP核定制
简介
NIOS II是一个建立在FPGA上的嵌入式软核处理器,除了可以根据需要任意添加已经提供的外设外,用户还可以通过定制用户逻辑外设和定制用户指令来实现各种应用要求。这节我们就来研究如何定制基于Avalon总线的用户外设。
SOPC Builder提供了一个元件编辑器,通过这个元件编辑器我们就可以将我们自己写的逻辑封装成一个SOPC Builder元件了。下面,我们就以PWM实验为例,详细介绍一下定制基于Avalon总线的用户外设的过程。
我们要将的PWM是基于Avalon总线中的Avalon Memory Mapped Interface (Avalon-MM),而Avalon总线还有其他类型的设备,比如Avalon Streaming Interface (Avalon-ST)、Avalon Memory Mapped Tristate Interface等等,在这里我就不详细叙述了,需要进一步了解的请参考ALTERA公司的《Avalon Interface Specifications》(mnl_avalon_spec.pdf)。
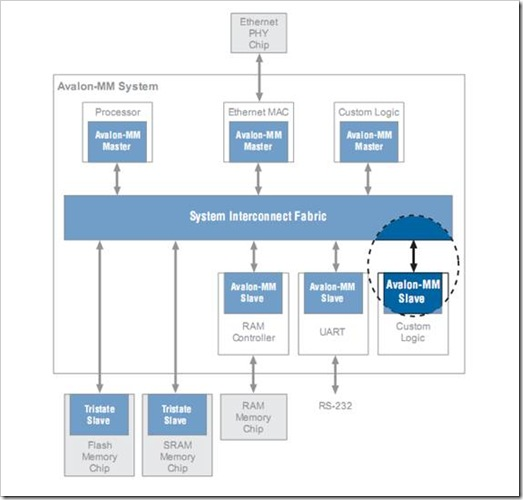
Avalon-MM接口是内存映射系统下的用于主从设备之间的读写的接口,下图就是一个基于Avalon-MM的主从设备系统。而我们这节需要做的就是下图高亮部分。他的地位与UART,RAM Controller等模块并驾齐驱的。
Avalon-MM接口有很多特点,其中最大的特点就是根据自己的需求自由选择信号线,不过里面还是有一些要求的。建议大家在看本文之前,先看一遍《Avalon Interface Specifications》,这样就能对Avalon-MM接口有一个整体的了解。
下图为Avalon-MM外设的一个结构图,
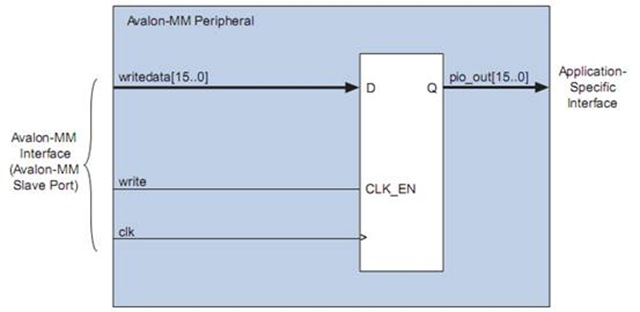
理论的就说这些,下面我们举例来具体说明,让大家可以更好的理解。
构建HDL
我们这一节是PWM为例,所以首先,我们要构建一个符合Avalon-MM Slave接口规范的可以实现PWM功能的时序逻辑,在这里,我们利用Verilog语言来编写。在程序中会涉及到Avalon信号,在这里,我们说明一下这些信号(其中,方向以从设备为基准)
|
HDL中的信号 |
Avalon信号类型 |
宽度 |
方向 |
描述 |
|
clk |
clk |
1 |
input |
同步时钟信号 |
|
reset_n |
reset_n |
1 |
input |
复位信号,低电平有效 |
|
chipselect |
chipselect |
1 |
input |
片选信号 |
|
address |
address |
2 |
input |
2位地址,译码后确定寄存器offset |
|
write |
write |
1 |
input |
写使能信号 |
|
writedata |
writedata |
32 |
input |
32位写数据值 |
|
read |
read |
1 |
input |
读时能信号 |
|
byteenable |
byteenable |
1 |
input |
字节使能信号 |
|
readdata |
readdata |
32 |
output |
32位读数据值 |
此外,程序中还包括一个PWM_out信号,这个信号是PWM输出,不属于Avalon接口信号。
PWM内部还包括使能控制寄存器、周期设定寄存器以及占空比设置寄存器。设计中将各寄存器映射成Avalon Slave端口地址空间内一个单独的偏移地址。没个寄存器都可以进行读写访问,软件可以读回寄存器中的当前值。寄存器及偏移地址如下:
|
寄存器名 |
偏移量 |
访问属性 |
描述 |
|
clock_divide_reg |
00 |
读/写 |
设定PWM输出周期的时钟数 |
|
duty_cycle_reg |
01 |
读/写 |
设定一个周期内PWM输出低电平的始终个数 |
|
control_reg |
10 |
读/写 |
使能和关闭PWM输出,为1时使能PWM输出 |
程序如下:
module PWM(
clk,
reset_n,
chipselect,
address,
write,
writedata,
read,
byteenable,
readdata,
PWM_out); input clk;
input reset_n;
input chipselect;
input [:]address;
input write;
input [:] writedata;
input read;
input [:] byteenable;
output [:] readdata;
output PWM_out; reg [:] clock_divide_reg;
reg [:] duty_cycle_reg;
reg control_reg;
reg clock_divide_reg_selected;
reg duty_cycle_reg_selected;
reg control_reg_selected;
reg [:] PWM_counter;
reg [:] readdata;
reg PWM_out;
wire pwm_enable; //地址译码
always @ (address)
begin
clock_divide_reg_selected<=;
duty_cycle_reg_selected<=;
control_reg_selected<=;
case(address)
'b00:clock_divide_reg_selected<=1;
'b01:duty_cycle_reg_selected<=1;
'b10:control_reg_selected<=1;
default:
begin
clock_divide_reg_selected<=;
duty_cycle_reg_selected<=;
control_reg_selected<=;
end
endcase
end //写PWM输出周期的时钟数寄存器
always @ (posedge clk or negedge reset_n)
begin
if(reset_n=='b0)
clock_divide_reg=;
else
begin
if(write & chipselect & clock_divide_reg_selected)
begin
if(byteenable[])
clock_divide_reg[:]=writedata[:];
if(byteenable[])
clock_divide_reg[:]=writedata[:];
if(byteenable[])
clock_divide_reg[:]=writedata[:];
if(byteenable[])
clock_divide_reg[:]=writedata[:];
end
end
end //写PWM周期占空比寄存器
always @ (posedge clk or negedge reset_n)
begin
if(reset_n=='b0)
duty_cycle_reg=;
else
begin
if(write & chipselect & duty_cycle_reg_selected)
begin
if(byteenable[])
duty_cycle_reg[:]=writedata[:];
if(byteenable[])
duty_cycle_reg[:]=writedata[:];
if(byteenable[])
duty_cycle_reg[:]=writedata[:];
if(byteenable[])
duty_cycle_reg[:]=writedata[:];
end
end
end //写控制寄存器
always @ (posedge clk or negedge reset_n)
begin
if(reset_n=='b0)
control_reg=;
else
begin
if(write & chipselect & control_reg_selected)
begin
if(byteenable[])
control_reg=writedata[];
end
end
end //读寄存器
always @ (address or read or clock_divide_reg or duty_cycle_reg or control_reg or chipselect)
begin
if(read & chipselect)
case(address)
'b00:readdata<=clock_divide_reg;
'b01:readdata<=duty_cycle_reg;
'b10:readdata<=control_reg;
default:readdata='h8888;
endcase
end //控制寄存器
assign pwm_enable=control_reg; //PWM功能部分
always @ (posedge clk or negedge reset_n)
begin
if(reset_n=='b0)
PWM_counter=;
else
begin
if(pwm_enable)
begin
if(PWM_counter>=clock_divide_reg)
PWM_counter<=;
else
PWM_counter<=PWM_counter+;
end
else
PWM_counter<=;
end
end always @ (posedge clk or negedge reset_n)
begin
if(reset_n=='b0)
PWM_out<='b0;
else
begin
if(pwm_enable)
begin
if(PWM_counter<=duty_cycle_reg)
PWM_out<='b1;
else
PWM_out<='b0;
end
else
PWM_out<='b0;
end
end endmodule
上面的程序保存好以后,命名为PWM.v,并将其存放到工程目录下。
硬件设置
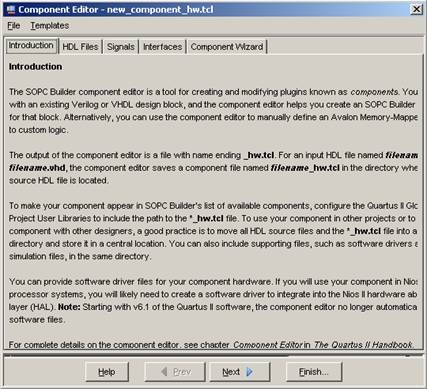
接下来,我们就通过SOPC Builder,来建立PWM模块了。首先,打开Quartus软件,进入SOPC Builder。进入后,点击下图红圈处

点击后,如下图所示,点击Next,
点击后,如下图所示,点击下图红圈处,将我们刚才建立的PWM.v加进来。(我将PWM。v放到了工程目录下的pwm文件夹下)
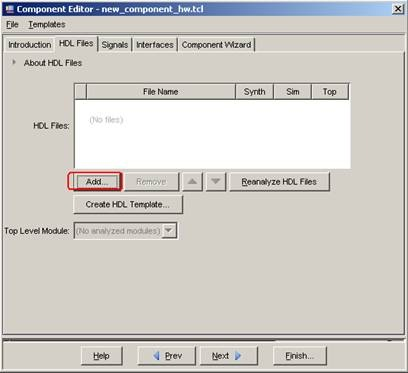
加入后,系统会对PWM.v文件进行分析,如下图所示,出现红圈处的文字,说明分析成功,点击close,关闭对话框。

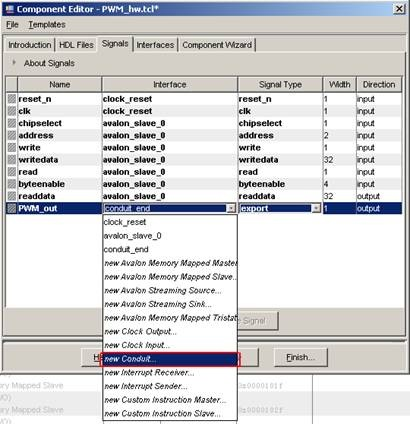
然后点击Next,如下图所示,通过下图,我们可以看到,PWM.v中的信号都出现在这里面了。我们可以根据我们的功能要求来配置这些信号,其中,Interface是Avalon接口类型 ,它包括Avalon-MM、Avalon-ST、Avalon Memory Mapped Tristate Interface等等。Signal Type指的是各个Avalon接口类型下的信号类型。PWM.v中的信号我们已经在前面都介绍过了,大家按照上面的要求设置就可以了。默认情况只有PWM_out需要改动,如下图示红圈处设置,

其中,Interface在下拉菜单中选择下图红圈处所示的选项。
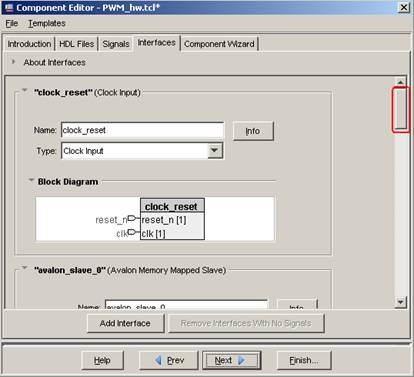
上面的选项都设置好以后,点击Next,如下图所示,我们通过下图红圈处的下拉条向下拉
拉到下图所示位置停止,我们将红圈处的改选为NATIVE,这个地方就是地址对齐的选项,我们选择为静态地址对齐。其他的地方都默认,不需要改动。
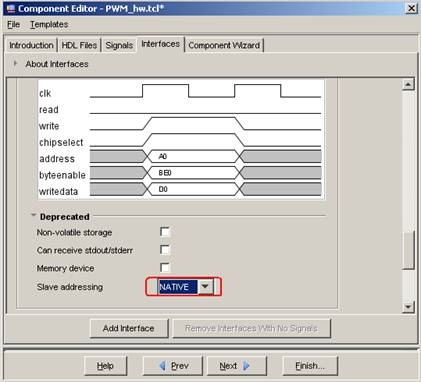
这里面还有很多选项,其中Timing部分需要说明一下,PWM的Avalon Slave端口与Avalon Slave端口时钟信号同步,读/写时的建立很保持时间为0,因为读、写寄存器仅需要一个时钟周期,所以读/写时为0等待切不需要读延时。
接着点击Next,如下图所示,其中红圈处需要注意,这个地方需要可以建立新组,然后在SOPC Builder中体现出来。
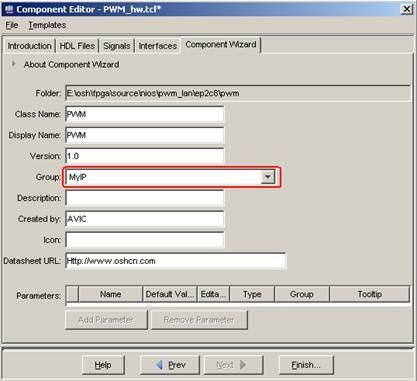
点击Finish后,会出现下面的对话框,点击Yes,就会生成一个PWM_hw.tcl脚本文件,大家可以打开看一下,里面放置的是刚才我们配置PWM时候的配置信息。
上面都完成以后,我们回到了SOPC Builder界面,我们在左侧边栏中可以找到下图所示的红圈处
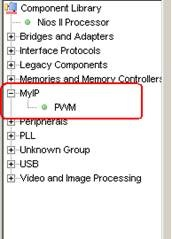
大家看到了吧,MyIP就是我们刚才建立的group。双击PWM,我们建立PWM模块,如下图

点击Finish,完成建立。
这里还需要设置一步,点击下图红圈处
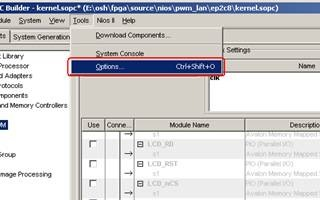
点击后,如下图所示,点击IP Serarch Path,然后点击Add,添加PWM.v所在位置的路径
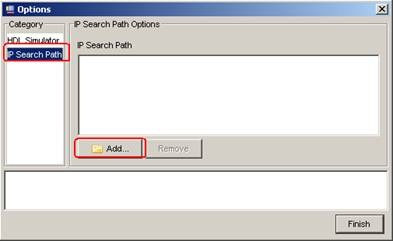
添加后,如下图所示

点击Finish完成。设置这个选项是为了让SOPC Builder可以找到PWM.v的位置。不然就会出现下次你进入SOPC Builder的时候PWM模块无效的问题。
接下来的工作就是自动分配地址,分配中断,编译,等待......
编译好以后,我们回到Quartus软件界面,我们可以看到,PWM出现了,我将它接到了一个LED上了,我们可以通过PWM改变LED的亮度,实现LED渐亮渐灭的过程。

接下来又是编译,等待.....
做好硬件部分工作以后,我们打开NIOS IDE,开始软件编程部分。
软件开发
首先对工程重新编译一次,Ctril+B,等待......
编译好以后,我们来看一下system.h的变化情况,我们可以发现,多出来PWM部分了。
下面是PWM测试代码,
#include <unistd.h>
#include "system.h" //根据寄存器的偏移量,我们定义一个结构体PWM
typedef struct{
volatile unsigned int divi;
volatile unsigned int duty;
volatile unsigned int enable;
}PWM; int main()
{
int dir = ; //将pwm指向PWM_0_BASE首地址
PWM *pwm = (PWM *)PWM_0_BASE;
//对pwm进行初始化,divi最大值为232-1。
pwm->divi = ;
pwm->duty = ;
pwm->enable = ; //通过不断的改变duty值来改变LED一个周期亮灯的时间长短
while(){
if(dir > ){
if(pwm->duty < pwm->divi)
pwm->duty += ;
else
dir = ;
}
else{
if(pwm->duty > )
pwm->duty -= ;
else
dir = ;
} usleep();
} return ;
}
每天进步一点点------SOPC的Avalon-MM IP核(二) AVALON总线的IP核定制的更多相关文章
- 每天进步一点点------SOPC的Avalon-MM IP核(一) avalon总线的信号时序
在SOPC中自定义外设时.可以设置avalon总线的信号时序,以满足外设的要求.一般情况下,可以设为: 其中setup为read和write信号之前,address和writedata信号提前建立的时 ...
- 每天进步一点点------SOPC PIO (一)
最近想使用Nios II里的并口PIO口进行双向操作,即需要输出的时候设置为输出方向,需要输入的时候设置为输入方向.在这期间,因为没认真仔细阅读参考文档,走了一点点的弯路.下面就简单的介绍下并行输入/ ...
- Avalon MM 总线
对于Avalon Master来讲,Address信号代表一个字节(8-bit)的地址.Address的值必须与字节的宽度对齐,如果要对某个word的byte写,需要首先使用byteenable信号: ...
- 每天进步一点点------SOPC的uC/OS-II应用(一)
uC/OS-II(又名Micro C/OS)是基于嵌入式系统的完整的,可移植.可固化.可裁剪的可剥夺型实时内核,其已经广泛应用在航空飞行器.医疗设备.工业控制等可靠性和稳定性要求较高的场合.该内核的代 ...
- 每天进步一点点------SOPC的Avalon-MM IP核(三) LCD1602 IP定制
注:Avalon信号类型命名参考图 /********************************************************************************* ...
- 每天进步一点点------SOPC的Avalon-MM IP核(四) KEY_LED IP定制
/********************************************************************************* * Company : * Eng ...
- 每天进步一点点------SOPC TIMER (一)
寄存器图 可以通过操作以下的寄存器来实现对timer(定时器)内核的操作(仅描述32位计数器) 状态寄存器: TO(timeout) :计数器计数到0时,该位置1,之后TO位的值会保持,直到手动清零, ...
- 每天进步一点点——Linux中的线程局部存储(二)
转载请说明出处:http://blog.csdn.net/cywosp/article/details/26876231 在Linux中另一种更为高效的线程局部存储方法,就是使用keyword ...
- 每天进步一点点------创建Microblaze软核(二)
第四步 进入Platform Studio操作界面通过向导创建软核后,进入到PlatformStudio——内核开发环境.Platform Studio主界面如下图. 在Ports项中,右键点击RS2 ...
随机推荐
- springBoot 2.1.5 pom 文件 unknown 错误
插件不兼容 pom文件添加 <properties> <maven-jar-plugin.version>2.6</maven-jar-plugin.version ...
- 松软科技课堂:jQuery 事件函数
jQuery 事件函数 jQuery 事件处理方法是 jQuery 中的核心函数. 事件处理程序指的是当 HTML 中发生某些事件时所调用的方法.术语由事件“触发”(或“激发”)经常会被使用. 通常会 ...
- MySQL登录和退出
登录必须保证服务是启动的(否则有权限有身份也进不来)进入仓库(数据库)前,有身份验证.需要有权限和密码 (用户名密码) 登录的方式一 通过MySQL自带的客户端 Command Line Client ...
- 2019-08-12 纪中NOIP模拟B组
T1 [JZOJ4879] 少女觉 题目描述 “在幽暗的地灵殿中,居住着一位少女,名为古明地觉.” “据说,从来没有人敢踏入过那座地灵殿,因为人们恐惧于觉一族拥有的能力——读心.” “掌控人心者,可控 ...
- CSS的快速入门
CSS的快速入门 1.CSS要学习的内容主要包括 1. CSS概念和快速入门 2.CSS选择器(重点+难点) 3.美化网页(文字.阴影.超链接.列表.渐变,等) 4.盒子模型 5.浮动 6.定位 2. ...
- Git的安装与使用详解
git安装 下载安装git:采用默认配置安装即可 使用git --version确认是否安装成功,如下 GitHub使用: 配置sshkey,后续可以免密登录github cd / ssh-keyge ...
- Educational Codeforces Round 81 (Rated for Div. 2) A-E简要题解
链接:https://codeforces.com/contest/1295 A. Display The Number 贪心思路,尽可能放置更多位,如果n为奇数,消耗3去放置一个7,剩下的放1 AC ...
- 《软件测试52讲》读书笔记 —— API测试怎么做
前言 文章中还介绍了测试工具,比如cURL.postman,单API如何测试:但这些都是偏基础的东西,且网上教程各式各样,就不再赘述了:这里主要讲的就是关于复杂场景的API测试要如何应对 API测试的 ...
- protobuf-net简单使用
第一个测试的proto文件 syntax = "proto3"; package ProtoMsg; message Foo { ; int32 id = ; repeated b ...
- Java上传图片到Ftp,包含上传后文件大小为0的问题和Properties配置文件的读取
准备工作:需要使用coomos-net jar包.下载地址 一. 上传图片到FTP,文件大小为0的问题,解决:将ftp模式修改为Passive模式就可以了. //将ftp模式修改为Passive模式 ...