3D点云的深度学习
使用卷积神经网络(CNN)架构的深度学习(DL)现在是解决图像分类任务的标准解决方法。但是将此用于处理3D数据时,问题变得更加复杂。首先,可以使用各种结构来表示3D数据,所述结构包括:
1 体素网格
2 点云
3 多视图
4 深度图
对于多视图和深度图的情况,该问题被转换为在多个图像上使用2D CNN解决。通过简单定义3D卷积核,可以将2D CNN的扩展用于3D Voxel网格。但是,对于3D点云的情况,目前还不清楚如何应用DL工具。但是之前也已经有几种解决办法了,具体可以参看 http://www.cnblogs.com/li-yao7758258/p/8182846.html 的总结
以及最近山东大学研究者们提出的PointCNN,对于pointCNN 这篇论文是一种为基于点云的特征学习提出了一种简单且通用的框架。CNN成功的关键是要能利用数据中以网格形式密集表示的空间上的局部相关性(比如图像)。但是,点云是不规则和无序的,因此在这些点关联的特征上直接求核的卷积会导致形状信息的丢失,同时还会因顺序不同而不同。为了解决这些问题,提出了根据输入点学习一种X变换,然后将其用于同时加权与点关联的输入特征和将它们重新排列成潜在隐含的规范顺序,之后再在元素上应用求积和求和运算。我们提出的方法是典型CNN向基于点云的特征学习的泛化,因此将其称为PointCNN。实验表明,PointCNN能在多种有挑战性的基准数据集和任务上实现与之前最佳方法媲美或更好的表现。
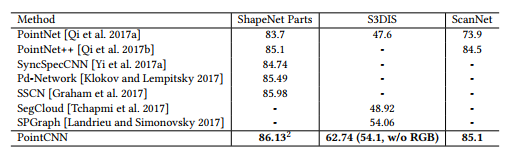
PointCNN与其他方法的对比
其次,图像的可用数据比较多,尽管最近3D数据集的数量有所增加 。但是,对于3D情况,可以容易地生成合成数据。
下面附有在3D数据上使用DL工具的论文列表
- Voxel Grid – Volumetric CNN:
- Voxnet: A 3D convolutional neural network for real-time object classification
- Volumetric and multi-view CNNs for object classification on 3d data– compared volumetric CNNs to Multi-view CNNs for object classification. They showed that the multi-view approach performs better, however, the resolution of the volumetric model was limited
- 3D shapenetes: A deep representation for volumetric shapes
- Multi-View CNNs:
- Point clouds:
- Pointnet: Deep learning on point sets for 3d classification and segmentation – In this work they applied a convolution kernel on each point separately, creating a higher dimensional representation of each point and then max-pooling over the entire point set (max pooling used as a symmetric function) to get invariance to permutations of the input cloud (since there is no geometrical significance to the point order).
- Hand-crafted features + DNN :
- 3D deep shape descriptor – fed heat kernel signatures (HKS) descriptor into an NN to get an Eigen-shape descriptor and a Fischer shape descriptor.
有问题请指出,同时欢迎大家关注微信公众号
或者加入3D视觉微信群一起交流分享

3D点云的深度学习的更多相关文章
- 点云深度学习的3D场景理解
转载请注明本文链接: https://www.cnblogs.com/Libo-Master/p/9759130.html PointNet: Deep Learning on Point Sets ...
- 2020国防科大综述:3D点云深度学习——综述(3D点云分割部分)
目录 摘要 1.引言: 2.背景 2.1 数据集 2.2评价指标 3.3D点云分割 3.1 3D语义分割 3.1.1 基于投影的方法 多视图表示 球形表示 3.1.2 基于离散的方法 稠密离散表示 稀 ...
- 2020厦门大学综述翻译:3D点云深度学习(Remote Sensiong期刊)
目录 摘要 1.引言: 2.点云深度学习的挑战 3.基于结构化网格的学习 3.1 基于体素 3.2 基于多视图 3.3 高维晶格 4.直接在点云上进行的深度学习 4.1 PointNet 4.2 局部 ...
- 2020国防科大综述:3D点云深度学习—综述(点云形状识别部分)
目录 摘要 1.引言: 2.背景 2.1 数据集 2.2评价指标 3.3D形状分类 3.1基于多视图的方法 3.2基于体素的方法 3.3基于点的方法 3.3.1 点对多层感知机方法 3.3.2基于卷积 ...
- 点云上的深度学习及其在三维场景理解中的应用(PPT内容整理PointNet)
这篇博客主要是整理了PointNet提出者祁芮中台介绍PointNet.PointNet++.Frustum PointNets的PPT内容,内容包括如何将点云进行深度学习,如何设计新型的网络架构 ...
- 3D点云深度学*
3D点云深度学* 在自动驾驶中关于三维点云的深度学*方法应用.三维场景语义理解的方法以及对应的关键技术介绍. 1. 数据 但是对于3D点云,数据正在迅速增长.大有从2D向3D发展的趋势,比如在open ...
- 3D点云点云分割、目标检测、分类
3D点云点云分割.目标检测.分类 原标题Deep Learning for 3D Point Clouds: A Survey 作者Yulan Guo, Hanyun Wang, Qingyong H ...
- 为了好好看球,学霸们用深度学习重建整个比赛3D全息图
http://mp.ofweek.com/vr/a745673021206 周四晚上11点,万众瞩目的世界杯终于开踢了,虽然意大利.荷兰.智利.中国(手动滑稽)等强队没能进入本届世界杯,但C罗梅西谁主 ...
- 【深度学习】:一门入门3D计算机视觉
一.导论 目前深度学习已经在2D计算机视觉领域取得了非凡的成果,比如使用一张图像进行目标检测,语义分割,对视频当中的物体进行目标跟踪等任务都有非常不错的效果.传统的3D计算机视觉则是基于纯立体几何来实 ...
随机推荐
- 如何查看jdk和eclipse是几位的(eclipse快捷键)
查看jdk public class rr{ public static void main(String[] args) {String arch = System.getProperty( ...
- 本地Sql Server数据库传到服务器数据库
将网站项目上传到服务器时,会遇到本地数据库该如何上传的问题.下面在西部数码购买的虚拟主机的基础上,解决数据库上传问题. 1.在西部数码购买虚拟主机后,会赠送了一个数据库,该数据库就可以作为网站项目 ...
- Hbase常用Shell命令
status 查看系统状态 hbase(main):010:0> status 1 active master, 0 backup masters, 4 servers, 0 dead, 6.5 ...
- sqlplus 执行 sql 文件
SQL>START file_name or SQL>@ file_name 1 .sqlplus system/system@srv 2. sql>@c:\a.sql (执行此 ...
- ToolTip C#
yourToolTip = new ToolTip(); //The below are optional, of course, yourToolTip.ToolTipIcon = ToolTipI ...
- AB Test 是什么
关于AB Test是什么 一种灰度发布方式. ps:什么是灰度发布 每个灰度对象都是0%(白色)到100%(黑色)的中间值,灰度发布是指在黑白之间,能够平滑过度的一种发布方式. 实现方式 让一部分用户 ...
- ECharts的geojson地图数据下载(根据城市区划代码的前六位查询)
链接如下: http://echarts.baidu.com/echarts2/doc/example/geoJson/china-main-city/522200.json 想要对应城市的geojs ...
- html-轮播图
<!DOCTYPE html> <html> <head> <title>纯CSS代码实现图片轮播 </title> <meta ch ...
- Eclipse的预设的Include的路径
http://www.eclipse.org/community/eclipse_newsletter/2013/october/article4.php 说明链接 http://www.eclips ...
- redis内部数据结构深入浅出
最大感受,无论从设计还是源码,Redis都尽量做到简单,其中运用到的原理也通俗易懂.特别是源码,简洁易读,真正做到clean and clear, 这篇文章以unstable分支的源码为基准,先从大体 ...