第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行!
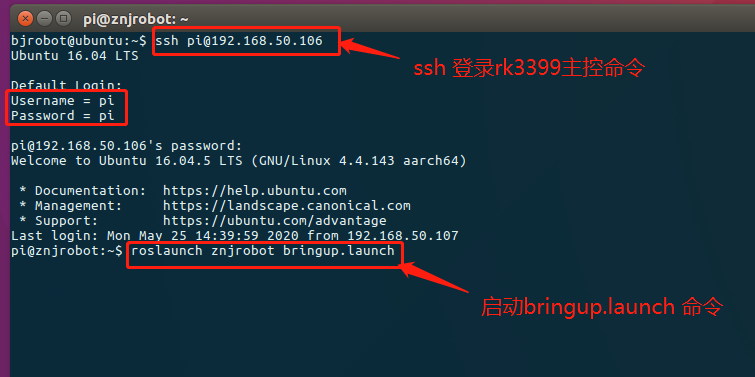
1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot bringup.launch。
2.在虚拟机端再打开一个终端,ssh 过去主控端启动roslaunch znjrobot camera.launch。

3.在虚拟机端打开一个终端,再次 ssh 过去小车主控端启动roslaunch znjrobot navigate.launch。

4.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz。

5.全屏化后点击 File,点击 Open Config,
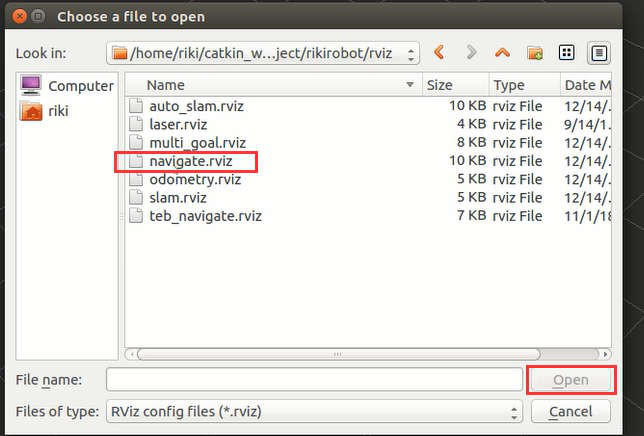
6.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/navigate.rviz,的navigate.rviz 文件。点 Open

7.把 rviz 窗口地图调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。然后校正位姿。
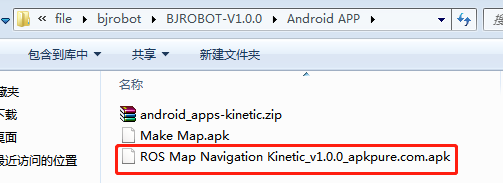
8.安卓手机下载网盘导航 APP,并安装。
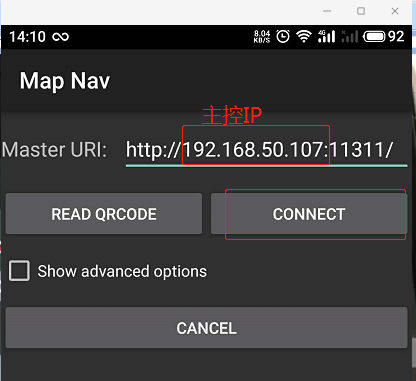
9.安卓手机和小车主控要连接在同一个路由器的 WIFI,打开导航 app,如下图所示,Master URI 要指向主控端的IP,如以下 ip:192.168.50.107 要改成你们小车连接 wifi 后实际的IP 然后点击 CONNECT.

10.点击手机 AAP 上的 Set Goal,然后再手机看到的地图上,点击屏幕不松开,此时会出现一个蓝色箭头,这个箭头方向就是小车到达目标点后的车头朝向。松开后即可完成导航目标点设定。
第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
随机推荐
- 第10.10节 Python使用__init__.py自动加载包下内容
在前面章节老猿介绍了包下模块及子包的加载的各种方式,并说明包的加载首先是自动加载包下的__init__.py文件.在<第10.6节 Python包的概念>中介绍了__init__.py文件 ...
- 第十三章 Python基础篇结束章
从2019年3月底开始学习Python,4月份开始在CSDN发博客,至今不到半年,老猿认为博客内容中关于Python基础知识的内容已经基本告一段落,本章进入Python基础知识结束章节,对Python ...
- Gif开发笔记(一):gif介绍、编译和工程模板
前言 实现gif图片的解码和生成. Gif 简介 GIF格式的名称是Graphics Interchange Format的缩写,是在1987年由Compu Serve公司为了填补跨平 ...
- Markdown 公式指导手册
本文为 Markdown 环境下的常用语法指引.Typora 编辑阅读器支持 \(\LaTeX\) 编辑显示支持,例如:\(\sum_{i=1}^n a_i=0\),访问 MathJax 以参考更多使 ...
- oracle归档空间不足的问题(rman删除归档日志)
案例一:归档日志满,数据库用户无法登陆,业务异常 解决方案一(可以登录rman): rman target / RMAN> crosscheck archivelog all; RM ...
- JavaSE10-继承&super&this&抽象类
1.继承 1.1 概述 多个类中存在相同属性和行为时,将这些内容抽取到单独一个类中,那么多个类无需再定义这些属性和行为,只要继承那一个类即可. 其中,多个类可以称为子类,单独那一个类称为父类.超类(s ...
- 解决因缺少驱动程序,导致“未在本地计算机上注册microsoft.ace.12.0”异常
写了一个winform程序,功能是选择一个excel表格,把里面的内容写进sqlite数据库中,在本地测试没问题,但是在其他电脑上就会报错"未在本地计算机上注册microsoft.ace.1 ...
- 03-flask-视图函数基础
代码 from flask import Flask, request, url_for, jsonify, redirect # 创建Flask对象 app = Flask(__name__) @a ...
- java基础:详解类和对象,类和对象的应用,封装思想,构造方法详解,附练习案列
1. 类和对象 面向对象和面向过程的思想对比 : 面向过程 :是一种以过程为中心的编程思想,实现功能的每一步,都是自己实现的 面向对象 :是一种以对象为中心的编程思想,通过指挥对象实现具体的功能 1. ...
- Blogs实现顶部的欢迎信息
简单,就直接上代码: <div style="text-align: center; font-size:20px; margin-bottom:0px; margin-top:0px ...