Hi3559AV100外接UVC/MJPEG相机实时采图设计(二):V4L2接口的实现(以YUV422为例)
下面将给出Hi3559AV100外接UVC/MJPEG相机实时采图设计的整体流程,主要实现是通过V4L2接口将UVC/MJPEG相机采集的数据送入至MPP平台,经过VDEC、VPSS、VO最后通过HDMI的输出,给出(二)V4L2接口的实现。
可以先参照前面随笔介绍(一)Linux USB摄像头驱动加载与分析:https://www.cnblogs.com/iFrank/p/14399421.html
板载平台:BOXER-8410AI
芯片型号:Hi3559AV100
相机型号:Logitch c270
开发环境:VM15.5+ubuntu16.04+Hilinux
1、V4L2接口说明
V4L2是Video for linux2的简称,为linux中关于视频设备的内核驱动。在Linux中,视频设备是设备文件,可以像访问普通文件一样对其进行读写,摄像头在/dev/video*下,如果只有一个视频设备,通常为/dev/video0。V4L2是内核提供给应用程序访问音、视频驱动的统一接口。V4L2 的相关定义包含在头文件<linux/videodev2.h> 中。
IOCTL的实现V4L2的控制
1:分配内存
2 VIDIOC_QUERYBUF:把VIDIOC_REQBUFS中分配的数据缓存转换成物理地址
3 VIDIOC_QUERYCAP:查询驱动功能
4 VIDIOC_ENUM_FMT:获取当前驱动支持的视频格式
5 VIDIOC_S_FMT:设置当前驱动的频捕获格式
6 VIDIOC_G_FMT:读取当前驱动的频捕获格式
7 VIDIOC_TRY_FMT:验证当前驱动的显示格式
8 VIDIOC_CROPCAP:查询驱动的修剪能力
9 VIDIOC_S_CROP:设置视频信号的边框
10 VIDIOC_G_CROP:读取视频信号的边框
11 VIDIOC_QBUF:把数据放回缓存队列
12 VIDIOC_DQBUF:把数据从缓存中读取出来
13 VIDIOC_STREAMON:开始视频显示函数
14 VIDIOC_STREAMOFF:结束视频显示函数
15 VIDIOC_QUERYSTD:检查当前视频设备支持的标准,例如PAL或NTSC。
这些IO调用,有些是必须的,有些是可选择的,其命令标志符在在头文件<linux/videodev2.h> 定义,具体如下:
1 #define VIDIOC_QUERYCAP _IOR('V', 0, struct v4l2_capability)
2 #define VIDIOC_RESERVED _IO('V', 1)
3 #define VIDIOC_ENUM_FMT _IOWR('V', 2, struct v4l2_fmtdesc)
4 #define VIDIOC_G_FMT _IOWR('V', 4, struct v4l2_format)
5 #define VIDIOC_S_FMT _IOWR('V', 5, struct v4l2_format)
6 #define VIDIOC_REQBUFS _IOWR('V', 8, struct v4l2_requestbuffers)
Logitch c270支持的像素格式有两种:
1 YUYV 4:2:2 2 Motion-JPEG
2、V4L2的实现流程
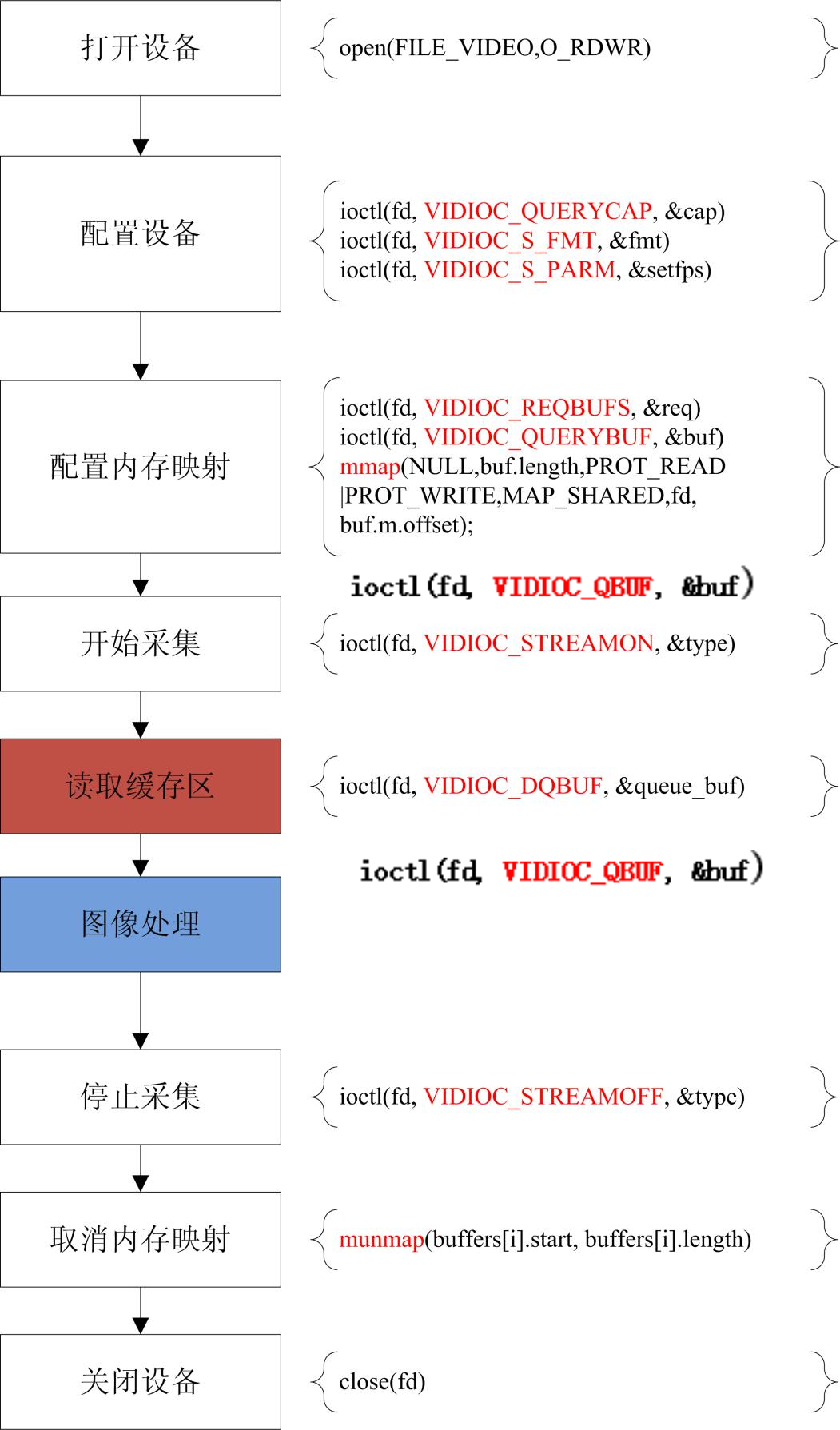
动态视频采集流程:
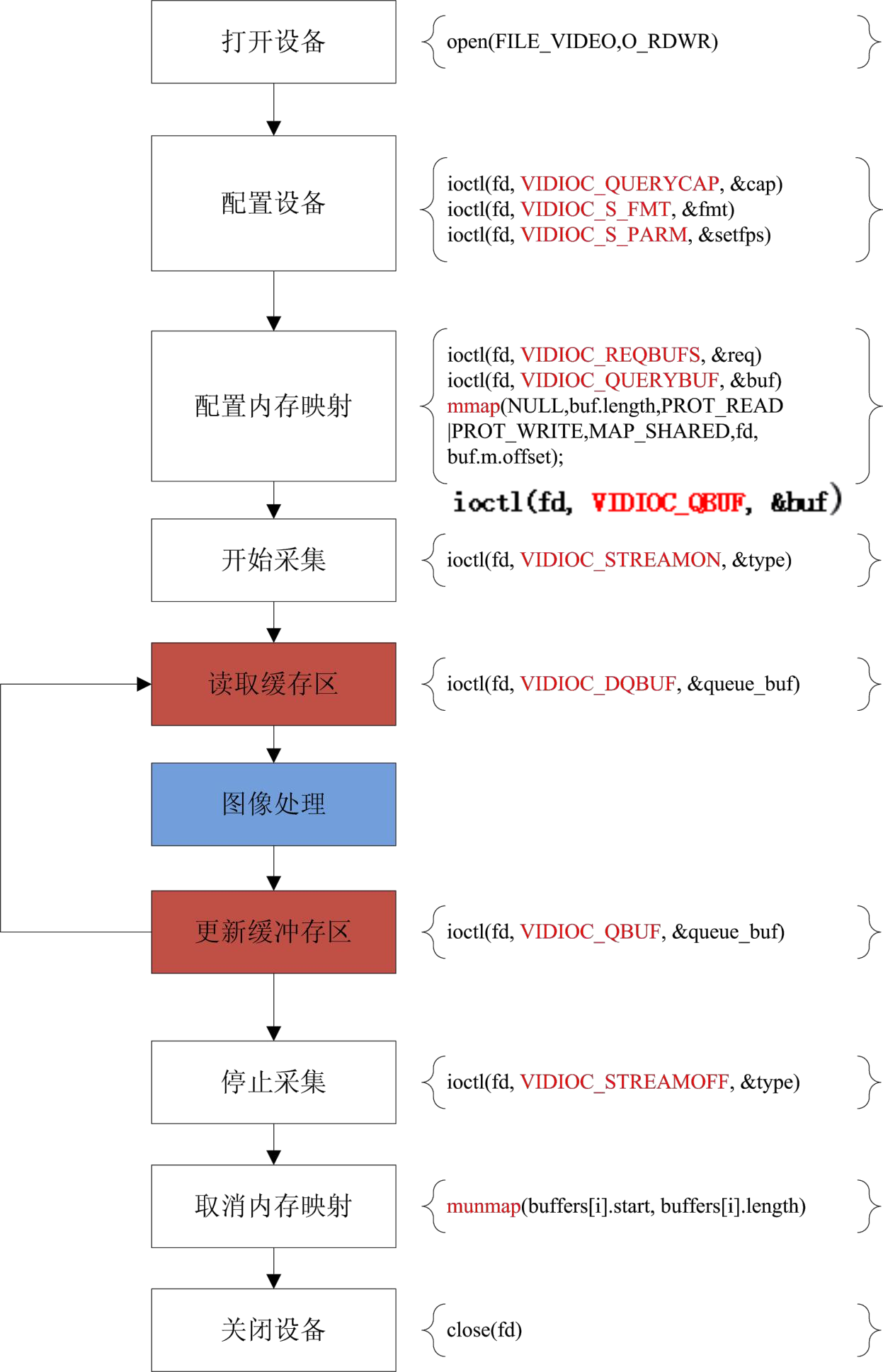
部分代码实现:
1 /*打开视频*/
2 if ((fd = open(FILE_VIDEO, O_RDWR)) == -1)
3 {
4 printf("Error opening V4L interface\n");
5 return (FALSE);
6 }
7
8 /*读video_capability中信息。
9 通过调用IOCTL函数和接口命令VIDIOC_QUERYCAP查询
10 摄像头的信息*/
11 if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1)
12 {
13 printf("Error opening device %s: unable to query device.\n",FILE_VIDEO);
14 return (FALSE);
15 }
16 else
17 {
18 printf("driver:\t\t%s\n",cap.driver);
19 printf("card:\t\t%s\n",cap.card);
20 printf("bus_info:\t%s\n",cap.bus_info);
21 printf("version:\t%d\n",cap.version);
22 printf("capabilities:\t%x\n",cap.capabilities);
23
24 /*其中capabilities: 4000001通过与各种宏位与,
25 可以获得物理设备的功能属性*/
26 if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) == V4L2_CAP_VIDEO_CAPTURE)
27 {
28 printf("Device %s: supports capture.\n",FILE_VIDEO);
29 }
30
31 if ((cap.capabilities & V4L2_CAP_STREAMING) == V4L2_CAP_STREAMING)
32 {
33 printf("Device %s: supports streaming.\n",FILE_VIDEO);
34 }
35 } //VIDIOC_QUERYCAP对应唯一结构体
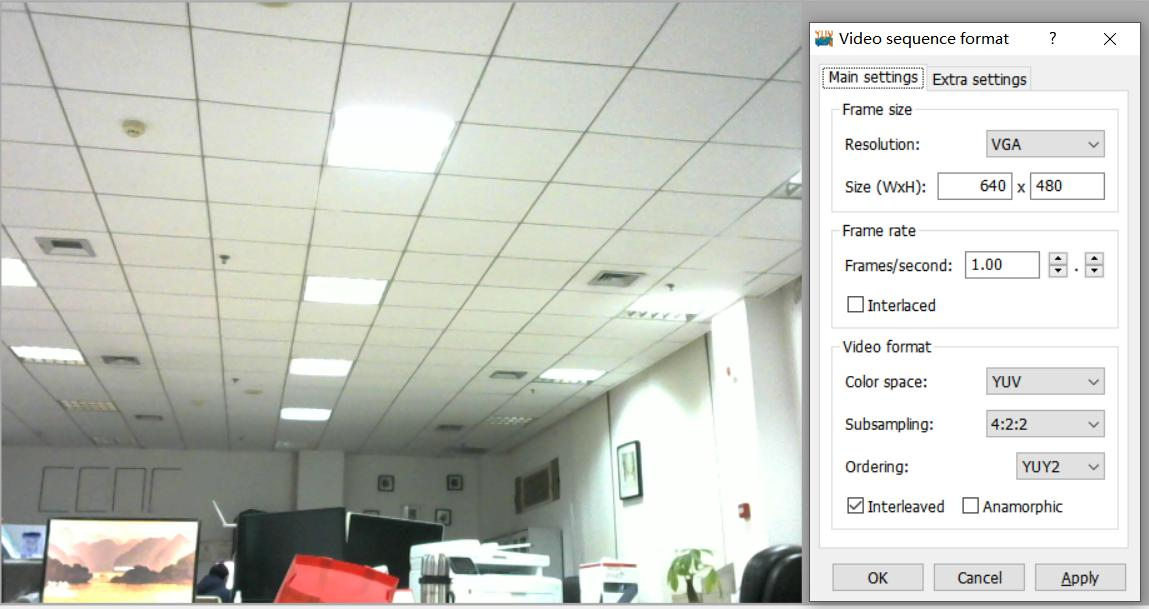
3、V4L2测试(640×480像素一帧图片输出)
我板载上装的是Logitch c270摄像头,从摄像头支持的图像像素输出的信息可以看出,在Hi3559板载上可以支持2种像素格式,这里选用的是V4L2_PIX_FMT_YUV422 格式。从生成image的大小可以判断出是正确的(YUV422数据大小 = 长 * 宽 * 1.5 = 640 * 480 * 2 = 614400 bytes = 600k)可以将image文件拷出来,使用pYUV 软件查看YUV图片。这里需要注意,使用pYUV 查看YUV图片的时候,需要正确设置图片格式,按我上面代码采集的数据格式,最后一帧图片输出结果如下:
之后随笔将推出结合MPP平台实现视频流的输出。
问题:

在虚拟机上,脚本运行正常,但是会卡在视频采集处,个人认为是虚拟机的缓存问题,而板载缓存比较充足,所以能够很好实现。
Hi3559AV100外接UVC/MJPEG相机实时采图设计(二):V4L2接口的实现(以YUV422为例)的更多相关文章
- Hi3559AV100外接UVC/MJPEG相机实时采图设计(三):V4L2接口通过MPP平台输出
可以首先参考前面两篇文章: Hi3559AV100外接UVC/MJPEG相机实时采图设计(一):Linux USB摄像头驱动分析: https://www.cnblogs.com/iFrank/p/1 ...
- Hi3559AV100外接UVC/MJPEG相机实时采图设计(一):Linux USB摄像头驱动分析
下面将给出Hi3559AV100外接UVC/MJPEG相机实时采图设计的整体流程,主要实现是通过V4L2接口将UVC/MJPEG相机采集的数据送入至MPP平台,经过VDEC.VPSS.VO最后通过HD ...
- Hi3559AV100外接UVC/MJPEG相机实时采图设计(四):VDEC_Send_Stream线程分析
下面随笔将对Hi3559AV100外接UVC/MJPEG相机实现实时采图设计的关键点-VDEC_Send_Stream线程进行分析,一两个星期前我写了有三篇系列随笔,已经实现了项目功能,大家可以参考下 ...
- Dalsa 8K彩色相机Camera link C#采图
一个采图工具,所以界面做的很简单. private SapAcquisition m_Acquisition; private SapBuffer m_Buffers; private SapAcqT ...
- 相机拍的图,电脑上画的图,word里的文字,电脑屏幕,手机屏幕,相机屏幕显示大小一切的一切都搞明白了!
相机拍的图,电脑上画的图,word里的文字,电脑屏幕,手机屏幕,相机屏幕显示大小一切的一切都搞明白了! 先说图片X×dpi=点数dotX是图片实际尺寸,简单点,我们只算图片的高吧,比如说拍了张图片14 ...
- FusionCharts制作实时刷新图
转自:http://yklovejava-163-com.iteye.com/blog/1889949 下面介绍的是用FusionCharts制作实时刷新图的过程(FusionCharts确实太好用了 ...
- Android相机实时自动对焦的完美实现
https://zhidao.baidu.com/question/873328177698804372.html Android相机实时自动对焦的完美实现 http://blog.csdn.net/ ...
- 关于nagios系统下使用shell脚本自定义监控插件的编写以及没有实时监控图的问题
关于nagios系统下shell自定义监控插件的编写.脚本规范以及没有实时监控图的问题的解决办法 在自已编写监控插件之前我们首先需要对nagios监控原理有一定的了解 Nagios的功能是监控服务和主 ...
- Hi3559AV100板载开发系列-pthread_create()下V4L2接口MJPEG像素格式的VIDIOC_DQBUF error问题解决-采用阻塞方式下select监听
最近一直加班加点进行基于Hi3559AV100平台的BOXER-8410AI板载开发,在开发的过程中,遇到了相当多的问题,其一是板载的开发资料没有且功能不完整,厂家不提供太多售后技术支持,厂家对部分 ...
随机推荐
- 【洛谷 p3372】模板-线段树 1(数据结构--线段树)
题目:已知一个数列,你需要进行下面两种操作:1.将某区间每一个数加上x:2.求出某区间每一个数的和. 解法:如题,模版题.需要加上 lazy 标记,也就是我的 upd.lazy 标记的思路就是对一个结 ...
- 抓取QQ音乐歌单
抓取QQ音乐歌单1.通过分析歌曲下载路径来分析所需参数: 通过比较, 得出其中歌曲下载url与参数vkey是可变的,歌曲下载url中可变得值是请求歌单返回的歌曲数据的strMediaMid参数, 而v ...
- Python Base64编码解码
import base64 str = '12345678'.encode('utf8') print(base64.b64encode(str).decode('utf8')) # 编码 接收的参数 ...
- 浅谈Webpack模块打包工具二
Webpack插件机制介绍 Loader专注实现资源模块加载,plugin解决其他自动化工作,比如清除dist目录,拷贝静态文件值输出目录,压缩输出代码等,下面列举几个plugin 的例子. Webp ...
- enumerate() -- Python
#!usr/bin/env python #coding:utf-8 ''' enumerate()说明: 1.enumerate()是Python的内置函数: 2.enumerate字面上是枚举.列 ...
- WPF 之命令(七)
一.前言 事件的作用是发布和传播一些消息,消息送达接收者,事件的使命也就完成了,至于消息响应者如何处理发送来的消息并不做规定,每个接收者可以使用自己的行为来响应事件.即事件不具有约束力. 命令 ...
- 实战交付一套dubbo微服务到k8s集群(8)之configmap使用
使用ConfigMap管理应用配置 拆分环境 主机名 角色 IP地址 mfyxw10.mfyxw.com zk1.od.com(Test环境) 192.168.80.10 mfyxw20.mfyxw. ...
- Chapter Zero 0.1.3 其他单元设备以及运作流程
其他单元设备 五大单元中的控制单元.算数逻辑段元都被整合到CPU的封装中, 但其实系统单元中,不止有CPU(控制单元.算数逻辑单元), 计算机单元还有哪些? 系统单元:系统单元包括CPU.主存储器(内 ...
- java 提供了哪些IO方式
今天听了杨晓峰老师的java 36讲,感觉IO这块是特别欠缺的,所以讲义摘录如下: 欢迎大家去订阅: 本文章转自:https://time.geekbang.org/column/article/83 ...
- Java之浅拷贝和深拷贝
[概述] Java中的对象拷贝 ( Object Copy ) 是指将一个对象的所有属性(成员变量)拷贝到另一个有着相同类类型的对象中去.例如,对象 A 和对象 B 都属于类 S,具有属性 a 和 b ...