[论文阅读] 颜色迁移-EM概率分割的局部颜色迁移
颜色迁移-EM概率分割的局部颜色迁移
文章: Local Color Transfer via Probabilistic Segmentation by Expectation-Maximization,[paper][code(未公开)]
本文目的为: 图像局部颜色迁移.
1-符号说明
在进行本文算法原理说明之前, 先对一些英文缩写进行简单说明:
- EM: Expectation-Maximization, 期望最大化, 是一种非监督期望最大化算法, 结合了极大似然和迭代求解的方法去预估数据的分布, 详见: 期望最大化(Expectation Maximization)算法介绍_Y学习使我快乐V的博客-CSDN博客_expectation maximization, EM(Expectation-Maximization)算法(通俗易懂) - 知乎 (zhihu.com), 最大期望算法(Expectation-Maximization algorithm,EM) - 八九十度 - 博客园 (cnblogs.com)
- GMM: Gaussian Mixture Model, 高斯混合模型, 混合高斯模型, 使用多个高斯分布来拟合数据分布, 详见: 一文详解高斯混合模型原理 - 知乎 (zhihu.com), 详解EM算法与混合高斯模型(Gaussian mixture model, GMM)_林立民爱洗澡的博客-CSDN博客_gmm
2-算法原理
简单来说, 本文对图像进行颜色分割, 对分割后区域单独进行颜色迁移, 对各区域迁移后的图像进行加权平均得到最后图像, 具体:
- 使用调整后的EM算法进行颜色分割
- 寻找每个区域的映射关系
- 对每个区域单独进行颜色迁移
- 将迁移后的图像进行加权平均得到最后的迁移图像
3-算法核心
为了利用局部信息, 本文利用GMM来描述图像颜色分布, 并使用EM进行概率分割, 因而EM算法对图像进行颜色分割是关键. 本文对EM进行了调整, 主要有2个方面: 一是期望计算, 二是对概率滤波.
3.1-E-step
E-step是计算每个像素属于每个区域的概率(将图像分为N区域), 原始计算期望及均值方差的方法如下,

与原始计算方式不一样, 更改后的计算方式为: 使用前一次滤波后的结果与当前结果进行加权, 如下所示:
文中对于这样做的解释是:
- 如果前一次滤波后的结果与当前结果具有相似的分布, 则相邻像素极有可能具有相似的颜色值, 这表明该像素不位于任何区域边界上, 因此, 加法操作增加了像素属于某些占主导地位的高斯分量的概率
- 如果具有不同的概率分布, 则像素可能处于区域的边界处, 加法运算使这些分布平均, 因此这个像素将有相似的概率同时适合几个高斯分量
3.2-概率滤波
本文在进行GMM分割时, 仅考虑了颜色信息, 没有使用空位位置信息. 对于相邻像素, 如果它们有相似的颜色, 他们的高斯分布也应该相似, 即概率也是要相似的.
因而为了增加空间相关信息, 使用了空间滤波方法对概率进行滤波处理. 本文使用的是调整后的双边滤波, 如下所示:

可以看到, 文中使用的滤波方式是: 在图像上计算双边滤波权重, 然后对概率进行加权平均. 作者没有解释为什么这样做, 为什么不直接在概率上计算权重.
我的理解是:
- 计算出来的期望图(每个像素属于每个区域的概率)是一个软的边界, 图像中的细节边缘可能已经没有那么明显了, 如果直接对概率进行滤波, 就不能很好的保护边缘信息
- 一般图像中的区域会>>图像的颜色通道数, 这样期望图的通道数也会>>图像的颜色通道数, 这样对期望图(概率)进行滤波会比图像进行滤波难
- 还有一点, 我认为比较重要的是: 期望图是迭代生成的, 每次迭代都需要重新计算, 而对原始图像进行滤波处理, 只需要计算一次即可, 可以节省算法耗时
滤波对结果的影响还是很大的, 滤波窗口不能太大也不能太小, 文中做实验进行了验证, 如下所示, 最后设置为7.

图中N为滤波窗口大小, 如果超过目标大小, 目标没有被检测出来, 最后颜色迁移不成功; 如果串口大小小于目标大小, 对目标边缘有影响, 颜色迁移后图像边缘颜色存在异常.
4-算法效果
如下所示为文中给出的一组结果:
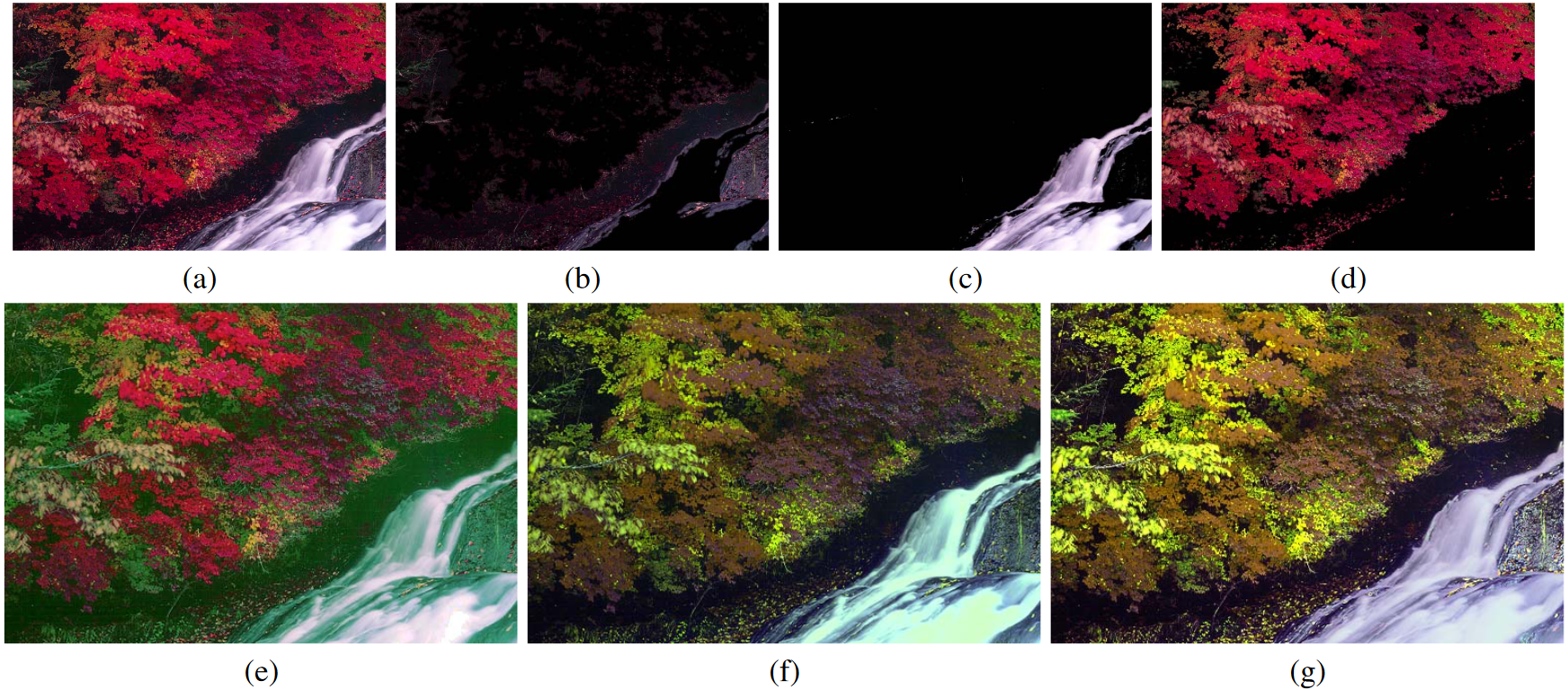
图(b)-(d)为概率分割结果, (e)为直方图均衡结果, (f)为全局颜色迁移结果, (g)为本文局部迁移结果
下图为另一组结果:
 图( c)为本文结果, (d)为全局颜色迁移结果, (e)为直方图均衡结果
图( c)为本文结果, (d)为全局颜色迁移结果, (e)为直方图均衡结果
5-补充说明
关于本文算法, 还有一些需要补充的说明:
- 本文算法是在Lab颜色空间进行处理的
- 在进行GMM-EM概率分割时, 使用Kmeans进行的初始化, 这个就对初始点的设置有一定的要求, 如果使用随机初始化, 可能每次结果还不一致
- 分割过程中, 会对比较接近的高斯模型(均值距离<阈值)进行合并, 并重新计算参数, 但没有详细说明这个阈值参数的设置
- 分割成颜色块之后, 颜色块之间的对应关系没有详细说明, 仅说明了2个规则, 对于图像分割后的颜色块数量不一致时(如合并完成后, target图像的颜色块>>source图像的颜色块), 如何处理映射关系文章中也没有介绍
- 亮度空间(L通道)最接近
- 保持单调性 - 文中对每个颜色块计算映射, 最后对所有映射迁移后的图像使用概率图进行加权平均融合

- 文中使用的算法, Kmeans, GMM-EM, bilateral filter都是比较耗时, 因而处理比较大的图像时是非常耗时, 文中也给出自己的耗时测试: Pentium-M 1.4GHz laptop computer, 512*512, 20 Gaussians initially, 耗时4分钟!!! 这结果...
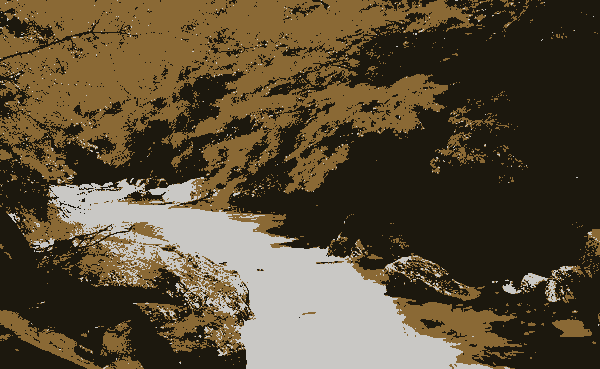
另外本文使用的都是很成熟的算法, 没有太大的改动, 方便实现, 但有些地方感觉没有写清楚(可能是没有看懂, 特别是颜色块处理), 同时也没有给出测试图像, 因而也不方便复现. 下面是使用matlab自带的kmeans和GMM相关函数实现的分割, 后面的颜色迁移没有进行复现.
原始图像是使用搜图, 找到的比较类似的图像. 原始图像地址

原图
Kmeans结果
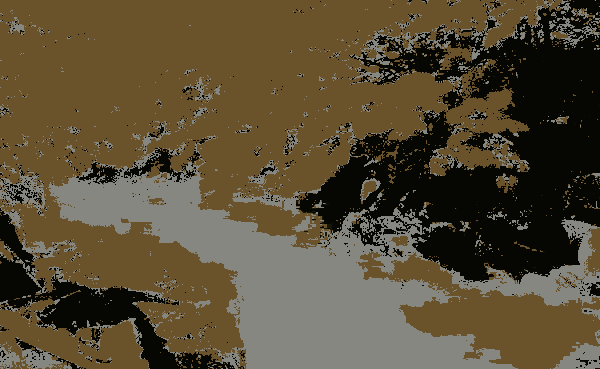
GMM结果
最后, 关于GMM的matlab实现, 可以参考: MATLAB中“fitgmdist”的用法及其GMM聚类算法 - 凯鲁嘎吉 - 博客园 (cnblogs.com)
[论文阅读] 颜色迁移-EM概率分割的局部颜色迁移的更多相关文章
- 深度学*点云语义分割:CVPR2019论文阅读
深度学*点云语义分割:CVPR2019论文阅读 Point Cloud Oversegmentation with Graph-Structured Deep Metric Learning 摘要 本 ...
- 论文阅读:Review of Visual Saliency Detection with Comprehensive Information
这篇文章目前发表在arxiv,日期:20180309. 这是一篇针对多种综合性信息的视觉显著性检测的综述文章. 注:有些名词直接贴原文,是因为不翻译更容易理解.也不会逐字逐句都翻译,重要的肯定不会错过 ...
- 论文阅读笔记六:FCN:Fully Convolutional Networks for Semantic Segmentation(CVPR2015)
今天来看一看一个比较经典的语义分割网络,那就是FCN,全称如题,原英文论文网址:https://people.eecs.berkeley.edu/~jonlong/long_shelhamer_fcn ...
- 论文阅读之Joint cell segmentation and tracking using cell proposals
论文提出了一种联合细胞分割和跟踪方法,利用细胞segmentation proposals创建有向无环图,然后在该图中迭代地找到最短路径,为单个细胞提供分割,跟踪和事件. 3. PROPOSAL GE ...
- BERT 论文阅读笔记
BERT 论文阅读 BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding 由 @快刀切草莓君 ...
- Action4D:人群和杂物中的在线动作识别:CVPR209论文阅读
Action4D:人群和杂物中的在线动作识别:CVPR209论文阅读 Action4D: Online Action Recognition in the Crowd and Clutter 论文链接 ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
- 论文阅读:Prominent Object Detection and Recognition: A Saliency-based Pipeline
论文阅读:Prominent Object Detection and Recognition: A Saliency-based Pipeline 如上图所示,本文旨在解决一个问题:给定一张图像, ...
- 【医学图像】3D Deep Leaky Noisy-or Network 论文阅读(转)
文章来源:https://blog.csdn.net/u013058162/article/details/80470426 3D Deep Leaky Noisy-or Network 论文阅读 原 ...
- 论文阅读 | FCOS: Fully Convolutional One-Stage Object Detection
论文阅读——FCOS: Fully Convolutional One-Stage Object Detection 概述 目前anchor-free大热,从DenseBoxes到CornerNet. ...
随机推荐
- uniapp小程序新版授权登录
1.授权按钮: <view> <button class='login-btn' type='primary' @click="bindGetUserInfo"& ...
- 【短道速滑九】仿halcon中gauss_filter小半径高斯模糊优化的实现
通常,我们谈的高斯模糊,都知道其是可以行列分离的算法,现在也有着各种优化算法实现,而且其速度基本是和参数大小无关的.但是,在我们实际的应用中,我们可能会发现,有至少50%以上的场景中,我们并不需要大半 ...
- KingbaseES 数据库软件卸载
关键字: KingbaseES.卸载 一.安装后检查 在安装完成后,可以通过以下几种方式进行安装正确性验证: 1. 查看安装日志,确认没有错误记录; 2. 查看开始菜单: 查看应用程序菜单中是否安 ...
- 将生成的Debug文件中的exe文件添加图标
制作.ico图片地址:https://www.bitbug.net/
- kibana配置文件kibana.yml参数详解
server.port: 默认值: 5601 Kibana 由后端服务器提供服务,该配置指定使用的端口号. server.host: 默认值: "localhost" 指定后端服务 ...
- ExecutorService、Callable、Future实现有返回结果的多线程原理解析
原创/朱季谦 在并发多线程场景下,存在需要获取各线程的异步执行结果,这时,就可以通过ExecutorService线程池结合Callable.Future来实现. 我们先来写一个简单的例子-- pub ...
- Python对字符数据进行清洗
import re mystr = "hahaAAA哈哈綂123./!#鱫愛" str1 = ''.join(re.findall('[\u4e00-\u9fa5]',mystr) ...
- IDEA 调试起来太费劲?你需要了解这几招!
各位好啊,我是会编程的蜗牛,我们在使用IDEA开发java项目时,经常需要用到IDEA的调试功能,不过平时我们用的调试方法可能过于简单了,其实IDEA还给我们提供了非常强大的调试功能,下面让我来看一看 ...
- 手写编程语言-如何为 GScript 编写标准库
版本更新 最近 GScript 更新了 v0.0.11 版本,重点更新了: Docker 运行环境 新增了 byte 原始类型 新增了一些字符串标准库 Strings/StringBuilder 数组 ...
- react.js+easyui 做一个简单的商品表
效果图: import React from 'react'; import { Form, FormField, Layout,DataList,LayoutPanel,Panel, Lab ...