Depth from Videos in the Wild 解读
2019年7月17日11:37:05
论文 Depth from Videos in the Wild: Unsupervised Monocular Depth Learning from Unknown Cameras
主要有几个亮点:
1,处理移动物体时 instance segmentation and tracking are not required,不需要实例分割,
虽然文章里说还是需要一个网络预测可能移动的区域,但比起需要实例分割,难度还是下降了点。
2,occlusion-aware consistency 遮挡情形下的深度预测一致性
3,能够通过网络学习内参
这篇文章还是有点干货的,毕竟谷歌出品。
先讨论第二点,遮挡情形下的深度预测的问题
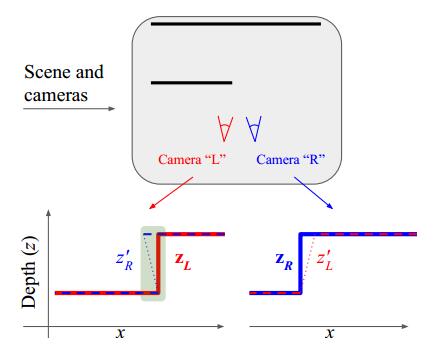
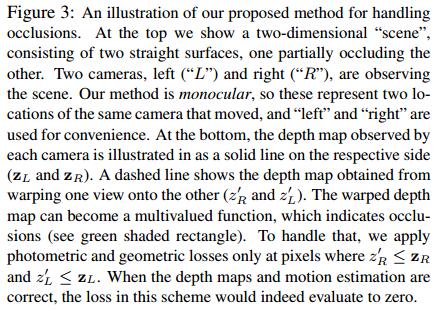
这里很好理解也比较好实现:
左右两个相机对同一个场景进行观察,但是因为存在遮挡的原因,左右两个相机对
同一个三维点的深度预测结果不一致。这些遮挡区域有什么特点呢?
左右两个相机对同一个三维点的预测深度分别为$\mathbf{z}_{L}$和$\mathbf{z}_{R}$
然后
把$\mathbf{z}_{L}$变换(warp)到右相机所在的位置得到深度$z_{L}^{\prime}$
把$\mathbf{z}_{R}$变换到左相机所在的位置得到深度$z_{R}^{\prime}$
we apply photometric and geometric losses only at pixels where $z_{R}^{\prime} \leq \mathbf{z}_{R}$
and $z_{L}^{\prime} \leq \mathbf{z}_{L}$.
只在 $z_{R}^{\prime} \leq \mathbf{z}_{R}$ 和 $z_{L}^{\prime} \leq \mathbf{z}_{L}$的区域计算 photometric 和 geometric losses。
为什么是这些区域?
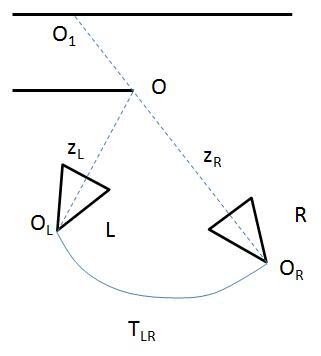
理想情况如下:

左相机L和右相机R观察同一个三维点O。
O到左相机的光心$O_L$距离为$z_L$,右相机类似。
从右相机到左相机的变换为$T_{LR}$,因此有如下关系:
$z_{R}^{\prime} = z_L=T_{LR}*z_R$
$z_{L}^{\prime} = z_R=T_{RL}*z_L$
也就是说,在两个不同的位置观察到的同一个三维点的深度$z_L$和$z_R$看起来大小
不一样,但是换算到到对方的位置后,应该是相等的。
下面是有遮挡的情况中的一种(右相机看的到,左相机看不到):
这里就不仅要像sfmlearner中做warp ref img to tgt ,还要在两个相机位置上互相warp深度图,
再把上述区域剔除出计算loss的部分。
深度不一致,一是因为有遮挡,二是因为这个三维点在运动。
所以这个方式对于处理移动物体的深度预测也是有帮助的
总的来讲就是要让loss计算的更清楚,把不该计算的部分剔除出去。
想了一下,warp ref_img和warp 深度图Z是一样的,利用现有设施简单改造下
就可以达到目标。
2019年7月19日23:42:42
遮挡的处理会干扰ssim的计算。。。
做法是当两帧之间的depth discrepancy 相比 depth discrepancy 的RMS较大
的时候,降低ssim在这个区域的权重?
2019年7月20日10:13:56
关于内参的学习,之前在sfmlearner剖析的博客中简单推导了一下公式,
这篇文章中不用T,用(R*XYZ+t)的写法替换,其他都是一样的,写成:
$depth_2*uv_2 = K\left(R*XYZ_1+t\right)$
$depth_2*uv_2 = K*R*depth_1*K^{-1}*uv_1+K*t$
调整下$depth_1$的顺序:
$$ depth_2*uv_2 = K*R*K^{-1}*depth_1*uv_1+K*t \tag{0} $$
这个就是论文中的方程1:
$$ z^{\prime} p^{\prime}=K R K^{-1} z p+K t \tag{1}$$
这里就没有把$depth_2$省略。
方程1的好处就是图片中的每个像素都要符合这个方程:
$z^{\prime}\left[\begin{array}{l}{u_2} \\ {v_2} \\ {1}\end{array}\right]= K R K^{-1} z\left[\begin{array}{l}{u_1} \\ {v_1} \\ {1}\end{array}\right]+K t $
也就是说,误差信号在反向传播时也能传导到每个像素。
然后
$K=\left(\begin{array}{ccc}{f_{x}} & {0} & {x_{0}} \\ {0} & {f_{y}} & {y_{0}} \\ {0} & {0} & {1}\end{array}\right)$
文章然后说了t提供不了内参学习时的监督信息,而且有可能产生假的解,又说了旋转信号R可以
提供内参学习时的监督信息,
附录A.2的推导解释了当旋转矩阵不为单位矩阵时,学出来的内参K会是正确的、唯一的。
Mathematically, $R = I$ provides no supervision signal for K, whereas $R \neq I$ provides a complete supervision siglal for it.
为了简化起见,假设相机只有绕y轴的旋转,且没有平移,则方程1简化成:
$$\Delta p_{x}=r_{y} f_{x}+\frac{r_{y}\left(p_{x}-x_{0}\right)^{2}}{f_{x}}$$
$\Delta p_{x}=p_{x}^{\prime}-p_{x}$,$\Delta p_{x}$就是监督信号的来源。
这里可以想象沿着y轴从上往下看相机坐标系,大概就是个二维坐标绕原点旋转的情形。
$p_{x}^{\prime}$就是u2,$p_{x}$就是u1。
后面的推导看的不是太懂,最后推导出了一个关于误差的不等式,应该符合什么样的规律,
也没说具体怎么操作,文章4.4节开头大概说了一下网络结构。
到了这里我就想:为什么我们不直接解方程组1来得到所有我们想要的 z,R,t,K,反正
所有的东西都是从方程组1来的,每一对像素都可以列一个方程。。。
文章里还说了,除了有移动物体的区域,整个图像上每个像素的 R 和 t 都是一样的。
用了一个mask来代表有移动物体的区域,在这个mask内的像素 t 可以不一样。
文章用了两个网络,
一个预测深度,
一个预测其他的东西(egomotion, object motion field relative to the scene, and camera intrinsics )
网络应该是把 有遮挡的区域 和 移动物体区域 一并处理了
可以猜测,学习内参K无非是在学习pose的基础上再多学几个参数,而且这些参数在
迭代过程中趋向于一个固定的值,文章中的说法是从 posenet 的bottleneck引出来的。
这样看来学习内参K似乎也没那么难。。。
要换掉batch normalization !

batchsize越大反而不好,把 batch normalization换成带有高斯噪声的layer nomalization
后效果会大大提高,之后增加batchsize才会略微让效果变好。。。
添加一定的噪声相当于正则化
另外一种理解是噪声能挤压解空间,缩小搜索范围,提高迭代效果。
我之前因为显存不足都是把batchsize设为1 然后训练一晚上,歪打正着。。。
2019年7月21日23:01:40
关于LayerNorm,pytorch 中已经有实现:
https://pytorch.org/docs/stable/nn.html?highlight=layernorm#torch.nn.LayerNorm
另外如果要加噪声的话参考这个:
https://github.com/pytorch/pytorch/issues/1959
直接在mean 和 std 上加噪声。
高斯噪声是噪声功率一定的情形下,对信号干扰最大的噪声类型。
另外一个博客:
https://zhuanlan.zhihu.com/p/69659844
2019年7月25日14:50:59
折腾了两三天,写了好几个给 layernorm层 的 均值和方差 参数 加噪声的版本,pytorch自带的
layernorm并不能显式的、方便的把噪声加入,单这一项工作就可以写一篇博客了。。。
写了一个更完善的 data loader 。。。
下面是最终写好的带噪声的layernorm层:
class LnWithGN_N2(nn.Module):
'''
对 NCHW 中的CHW做归一化,对于每个样本需要训练的参数就只有2个,因此
N个样本就2N个待训练参数,初始化的时候要预先知道N,即batchsize
'''
def __init__(self, batchsize, eps=1e-5, affine=True):
super(LnWithGN_N2, self).__init__()
self.batchsize = batchsize
self.affine = affine
self.eps = eps if self.affine:
self.gamma = nn.Parameter(torch.Tensor(self.batchsize).uniform_())
self.beta = nn.Parameter(torch.zeros(self.batchsize)) def forward(self, x):
shape = [-1] + [1] * (x.dim() - 1) mean = x.view(x.size(0), -1).mean(1).view(*shape)
std = x.view(x.size(0), -1).std(1).view(*shape) # 这里随便加了5%幅值的噪声
# torch.randn生成均值为0,方差为1 的高斯分布的数值。
mean = mean + 0.05*torch.randn( mean.size() )*mean
std = std + 0.05*torch.randn( std.size() )*std mean = mean.expand( x.size() )
std = std.expand( x.size() ) y = (x - mean) / (std + self.eps) if self.affine:
shape = [self.batchsize] + [1] * (x.dim() - 1) # [N, 1, 1, 1] y = self.gamma.view(*shape).expand( x.size() )*y + \
self.beta.view(*shape).expand( x.size() )
return y
2019年8月3日23:39:36
遮挡部分的计算,自己瞎改还不如直接改geonet来的快,
把loss计算部分做针对性修改就好了。
geonet还把光流计算好了,对于预测移动区域的深度估计更方便。
github上只有一个看起来跑不起来的pytorch版geonet,呕。
讲到这里就会发现,在相邻帧中预测出的深度不一致,可以用来辅助提升
光流的计算效果。
上面的layernorm用了后反而效果有所下降。。。还要研究研究。。。
2019年8月18日15:25:42
youtube上有个台湾男生发布各种解说深度估计的论文的视频,搜monodepth2、struct2depth
就能搜到。
忽然想到,那个前车和本车速度一样,深度估计就会估计成无限远的问题的解决方法。
之前的做法都是互相warp到对方的位置,考察一致性。
解决无限远的问题,应该warp到一个固定的世界坐标系考察一致性。
上面提过
把$\mathbf{z}_{L}$变换(warp)到右相机所在的位置得到深度$z_{L}^{\prime}$
把$\mathbf{z}_{R}$变换到左相机所在的位置得到深度$z_{R}^{\prime}$
如果前车和本车运动速度一样,那么上述四个z都是一样的,永远都追不到的点
当然是无限远的点。
为了让warp后的距离不一样,那就应该warp到一个固定的坐标系计算距离,除了
target和source的坐标系外,还要引入另外一个不随着 target 和 source 运动的坐标系,
从固定坐标系来看,前车就是运动了。
Depth from Videos in the Wild 解读的更多相关文章
- {ICIP2014}{收录论文列表}
This article come from HEREARS-L1: Learning Tuesday 10:30–12:30; Oral Session; Room: Leonard de Vinc ...
- CVPR 2017 Paper list
CVPR2017 paper list Machine Learning 1 Spotlight 1-1A Exclusivity-Consistency Regularized Multi-View ...
- 深度自适应增量学习(Incremental Learning Through Deep Adaptation)
深度自适应增量学习(Incremental Learning Through Deep Adaptation) 2018-05-25 18:56:00 木呆呆瓶子 阅读数 10564 收藏 更多 分 ...
- 自监督学习(Self-Supervised Learning)多篇论文解读(下)
自监督学习(Self-Supervised Learning)多篇论文解读(下) 之前的研究思路主要是设计各种各样的pretext任务,比如patch相对位置预测.旋转预测.灰度图片上色.视频帧排序等 ...
- IplImage 结构解读
IplImage 结构解读: typedef struct _IplImage { int nSize; /* IplImage大小,等于wi ...
- 对弈类游戏的人工智能(5)--2048游戏AI的解读
前言: 闲得没事, 网上搜"游戏AI", 看到一篇<<2048游戏的最佳算法是?来看看AI版作者的回答>>的文章. 而这篇文章刚好和之前讲的对弈类游戏AI对 ...
- 【Away3D代码解读】(三):渲染核心流程(渲染)
还是老样子,我们还是需要先简略的看一下View3D中render方法的渲染代码,已添加注释: //如果使用了 Filter3D 的话会判断是否需要渲染深度图, 如果需要的话会在实际渲染之前先渲染深度图 ...
- 【Away3D代码解读】(二):渲染核心流程(简介、实体对象收集)
我之前解析过Starling的核心渲染流程,相比Away3D而言Starling真的是足够简单,不过幸运的是两者的渲染流程是大体上相似的:Starling的渲染是每帧调用Starling类中的rend ...
- Jsoup代码解读之六-防御XSS攻击
Jsoup代码解读之八-防御XSS攻击 防御XSS攻击的一般原理 cleaner是Jsoup的重要功能之一,我们常用它来进行富文本输入中的XSS防御. 我们知道,XSS攻击的一般方式是,通过在页面输入 ...
随机推荐
- redis快速开始
1 下载地址:http://redis.io/download 2 安装步骤: 3 # 安装gcc 4 yum install gcc 5 6 # 把下载好的redis‐5.0.3.tar.gz放在/ ...
- 数据结构与算法之排序算法(python实现)
1.冒泡排序 冒泡排序的原理是依次比较相邻的两个数,如果前一个数比后一个数大则交换位置,这样一组比较下来会得到该组最大的那个数,并且已经放置在最后,下一轮用同样的方法可以得到次大的数,并且被放置在正确 ...
- python学习-1 编程语言的介绍
1.开发语言: 高级语言:Java.python.C#.PHP.Go.ruby.C++等等 低级语言:C.汇编语言 2.机器码和字节码 高级语言 ====>字节码 低级语言===>机器码 ...
- 【01字典树】hdu-5536 Chip Factory
[题目链接] http://acm.hdu.edu.cn/showproblem.php?pid=5536 [题意] 求一个式子,给出一组数,其中拿出ai,aj,ak三个数,使得Max{ (ai+aj ...
- HttpContext is null
HttpContext context1 = System.Web.HttpContext.Current; HttpContext context2 = System.Runtime.Remotin ...
- OkHttp3 + retrofit2 封装
0.下载文件 1.gradle 添加 compile 'com.squareup.retrofit2:retrofit:2.1.0'compile 'com.squareup.retrofit2:co ...
- SQLSERVER 在PROCEDURE 中动态执行SQL语句【EXEC】并获取
1.直接上代码 CREATE PROCEDURE [dbo].[TEST] AS BEGIN DECLARE )='N8-4F', --構建SQL需要的條件 ),--構建後的SQL語句 @cnt in ...
- 4、Wepy-Redux基本使用 参考自https://blog.csdn.net/baidu_32377671/article/details/86708019
摘抄自https://juejin.im/post/5b067f6ff265da0de02f3887 wepy 框架本身是支持 Redux 的,我们在构建项目的时候,将 是否安装 Redux 选择 y ...
- 处理python错误问题
------------恢复内容开始------------ 调试过程中遇到的问题 (1)爬取首页源码出现中文乱码 解决方案: 将网页编码强制转换成gbk,并去除解决乱码问题的三行代码. (2)程序运 ...
- static成员函数和static成员
C++的静态成员是和类关联的,它属于某个类,但是不属于某个特定的对象.静态成员变量只存储一份供所有对象共用.所以在所有对象中都可以共享它.使用静态成员变量实现多个对象之间的数据共享不会破坏隐藏的原则, ...