视觉SLAM关键方法总结
点“计算机视觉life”关注,置顶更快接收消息!
最近在做基于激光信息的机器人行人跟踪发现如果单独利用激光信息很难完成机器人对行人的识别、跟踪等功能,因此考虑与视觉融合的方法,这样便可以充分利用激光雷达提供的精确位置信息及视觉提供的丰富纹理、颜色等场景信息。以下是最近调研视觉SLAM中的实现方法的总结,包括三方面内容:姿态计算、闭环检测、BA优化。
姿态计算
一、通过提取图像的特征描述子,如ORB、SURF和SIFT等特征描述子,然后通过RANSAC算法进行图像匹配去除匹配点中的外点,再通过将二维点对映射到三维之后,便可以利用PnP或ICP算法计算相机位姿。基于特征提取的位姿计算算法对场景有一定的要求,在无纹理场景会出现位姿计算失败的情形。
二、直接图像匹配方法:直接图像匹配并不对图片进行特征提取,核心思想是在旋转坐标系下,基于相机一致性的假设,在相机的刚体变换已知的情况下,利用相机变换矩阵将目标图片投影到当前图片上,其像素之间的差异应该最小,将姿态计算转换为加权最小二乘问题。直接图像匹配算法的计算效率很高,不依赖GPU,具有很高的理论和商用价值。
闭环检测
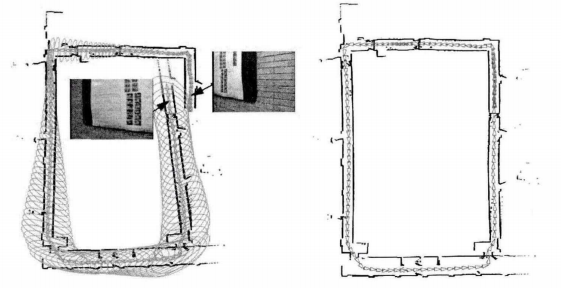
闭环检测算法指的是通过检测算法检测出之前访问过的场景。如图1所示,当机器人在移动过程中,特别是在探索大面积的场景时,由于模型的不确定性以及设备的噪声,不确定性会逐渐增长。通过引入闭环检测技术,识别出历史访问过的场景以增加位姿之间的约束,可以很好的减少这种不确定性。
闭环检测方法有:
一、最简单的闭环检测算法是将新检测出来的关键帧和过去所有的关键帧一一进行比较,虽然这种方法能比较好的检测出当前场景是否在之前出现过,但是在大规模场景下,机器人往往有成千上万个关键帧,这种方法检测效率及其底下,不能再实际场景中使用。
二、通过将图像中的特征和整个地图中的路标对应起来,然后建立一个所有路标的数据库,通过使用路标分类器来加快场景识别速度。比如讲所有路标构建成一棵KD-Tree,当新添加一帧关键帧时,将关键帧在KD-Tree中进行检索,从中检索之前出现过的场景。
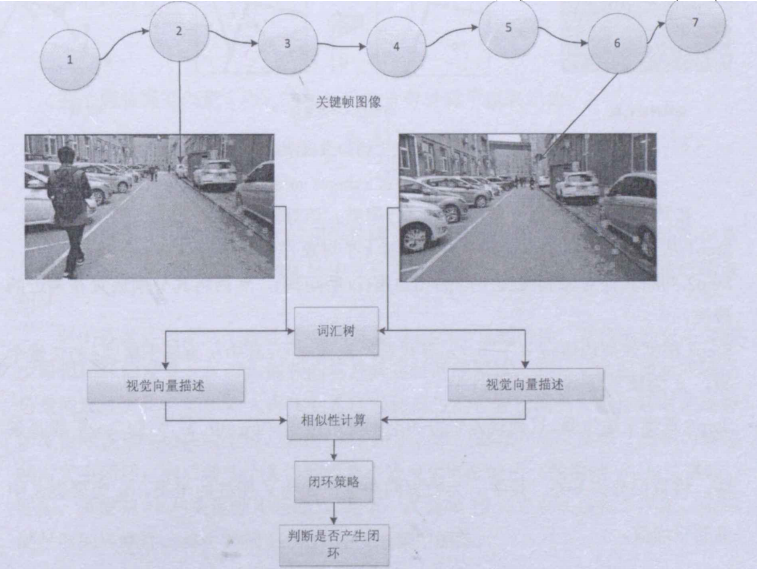
三、基于视觉词袋的闭环检测方法,这种方法通过将特征描述子抽象成词汇,通过TF-IDF方法识别出现过的场景。如图2所示,是闭环检测中基于词袋模型流程图。使用视觉词袋的方法效率很高,可用在大规模地图的创建上。
BA优化
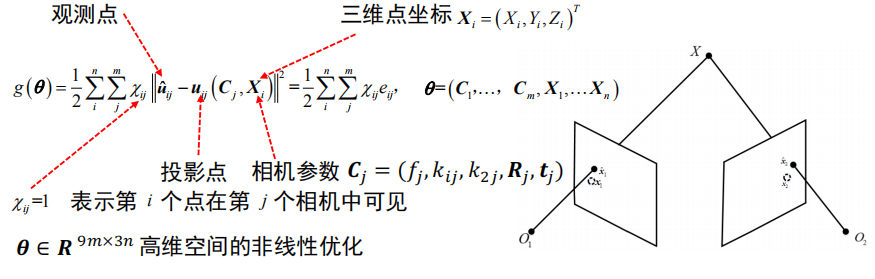
一、问题阐述:同时对三维点位置和相机参数进行非线性优化。
二、LM法的原理与优势:
原理:是一种“信赖域”的方法,当收敛速度较快时,增大信赖域使算法趋向于高斯牛顿法;当收敛速度较慢时,减小信赖域使算法趋向于最速下降法。
优势:速度快;可以在距离初始值较远处得到最优解。
SLAM优化算法对比
| 算法 | 缺点 | 优点 |
|---|---|---|
| KF/EKF | 假设噪声为高斯分布,在高维状态空间时计算效率较低,不适合大规模场景的地图构建 | 原理简单,小场景下收敛性好。 |
| PF | 会不可避免出现粒子退化现象,每个粒子需包含整张地图信息导致不适合大场景地图构建 | 将运动方程表示为一组粒子,通过蒙特卡罗方法求解,能够处理非线性非高斯噪声。 |
| EM | 计算量大,不能用于大规模场景 | 有效解决了数据关联问题 |
| 图优化 | 对闭环检测算法的要求严格 | 出现多种图优化框架,能够有效解决滤波器算法的缺陷,能用于大规模场景的地图创建 |
推荐阅读
如何从零开始系统化学习视觉SLAM?
从零开始一起学习SLAM | 为什么要学SLAM?
从零开始一起学习SLAM | 学习SLAM到底需要学什么?
从零开始一起学习SLAM | SLAM有什么用?
从零开始一起学习SLAM | C++新特性要不要学?
从零开始一起学习SLAM | 为什么要用齐次坐标?
从零开始一起学习SLAM | 三维空间刚体的旋转
从零开始一起学习SLAM | 为啥需要李群与李代数?
从零开始一起学习SLAM | 相机成像模型
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 神奇的单应矩阵
从零开始一起学习SLAM | 你好,点云
从零开始一起学习SLAM | 给点云加个滤网
从零开始一起学习SLAM | 点云平滑法线估计
从零开始一起学习SLAM | 点云到网格的进化
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
从零开始一起学习SLAM | 掌握g2o顶点编程套路
从零开始一起学习SLAM | 掌握g2o边的代码套路
零基础小白,如何入门计算机视觉?
SLAM领域牛人、牛实验室、牛研究成果梳理
我用MATLAB撸了一个2D LiDAR SLAM
可视化理解四元数,愿你不再掉头发
最近一年语义SLAM有哪些代表性工作?
视觉SLAM技术综述
汇总 | VIO、激光SLAM相关论文分类集锦
研究SLAM,对编程的要求有多高?
2018年SLAM、三维视觉方向求职经验分享
深度学习遇到SLAM | 如何评价基于深度学习的DeepVO,VINet,VidLoc?
视觉SLAM关键方法总结
视觉SLAM关键方法总结的更多相关文章
- SLAM学习笔记 - 视觉SLAM方法资源汇总
工具类: ros框架 linux系列教程 vim Eigen Eigen快速入门 Pangolin Pangolin安装与使用 数据集: TUM 数据格式 提供pyt ...
- 如何从零开始系统化学习视觉SLAM?
由于显示格式问题,建议阅读原文:如何从零开始系统化学习视觉SLAM? 什么是SLAM? SLAM是 Simultaneous Localization And Mapping的 英文首字母组合,一般翻 ...
- 视觉SLAM中的深度估计问题
一.研究背景 视觉SLAM需要获取世界坐标系中点的深度. 世界坐标系到像素坐标系的转换为(深度即Z): 深度的获取一共分两种方式: a)主动式 RGB-D相机按照原理又分为结构光测距.ToF相机 To ...
- 视觉SLAM技术应用
视觉SLAM技术应用 SLAM技术背景 SLAM技术全称Simultaneous localization and mapping,中文为"同时定位与地图构建".SLAM可以在未知 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- 视觉SLAM的数学表达
相机是在某些时刻采集数据的,所以只关心这些时刻的位置和地图. 就把这一段时间的运动变成了李三时刻 t=1,2,...K当中发生的事情. 在这些事可,x表示机器自身的位置. x1,x2,x3,x4... ...
- 视觉SLAM中相机详解
视觉SLAM中,通常是指使用相机来解决定位和建图问题. SLAM中使用的相机往往更加简单,不携带昂贵的镜头,以一定的速率拍摄周围的环境,形成一个连续的视频流. 相机分类: 单目相机:只是用一个摄像头进 ...
- 视觉SLAM之词袋(bag of words) 模型与K-means聚类算法浅析
原文地址:http://www.cnblogs.com/zjiaxing/p/5548265.html 在目前实际的视觉SLAM中,闭环检测多采用DBOW2模型https://github.com/d ...
- 视觉slam领域经典综述和具体应用场景
一.经典综述文章 1. Durrant-Whyte H, Bailey T. Simultaneous localization and mapping: part I[J]. IEEE robot ...
随机推荐
- [学习笔记] 在Eclipse中导入项目
参考前文:[学习笔记] 在Eclips 中导出项目 选择已经导出的文件: 导入之后,项目结构如下: 至此,完成.
- 为什么 Python 中的 True 等于 1
开始的时候,需要用以下函数来做一个判断,根据返回的值来做一些后续判断处理: def is_success(param): if not param: return False return True ...
- [NOIP普及组2001]最大公约数和最小公倍数问题
目录 链接 博客链接 题目链接 题目内容 题目描述 格式 输入 输出 数据 样例 输入 输出 说明 题目名称:最大公约数和最小公倍数问题 来源:2001年NOIP普及组 链接 博客链接 CSDN 洛谷 ...
- Kubernetes对Pod调度指定Node以及Node的Taint 和 Toleration
由于博客园不支持markdown,推荐以下url阅读: 原创url:https://blog.csdn.net/weixin_42495873/article/details/103364868 ## ...
- Python习题006
作业一:打印10*10 星星 ★☆ 要求一:普通打印★ l = 0 while l <10: h = 0 while h < 9: print("★", end=&q ...
- MongoDB部分
- 项目遇到的问题:页面c:forEach循环的数据进行计算传回后台并保持到数据库
应该还有更简单的方法 但是我不晓得 手动给文本框输入数据保存到数据库 A表 :通过订单编号 查询数据获得 B表 :通过A表中的字段查询遍历获得 问题: 手动输入文本框内容 保存到数据库 页面form提 ...
- css之实现下拉框自上而下展开动画效果&&自下而上收起动画效果
HTML代码: <div className={CX('font-size-selector-sub-list', { show: shouldSubListShow === true, hid ...
- 谷歌大脑提出:基于NAS的目标检测模型NAS-FPN,超越Mask R-CNN
谷歌大脑提出:基于NAS的目标检测模型NAS-FPN,超越Mask R-CNN 朱晓霞发表于目标检测和深度学习订阅 235 广告关闭 11.11 智慧上云 云服务器企业新用户优先购,享双11同等价格 ...
- Session共享问题---理论
随着网站访问量增加,初期的一台服务器已经完全不能支持业务,这个时候我们就需要增加服务器设备,来抗住请求的增量,如下所示: 负载均衡的目的本来就是要为了平均分配请求,所以没有固定第一次访问和第二次访问的 ...