python实现图像二值化
1.什么是图像二值化
彩色图像: 有blue,green,red三个通道,取值范围均为0-255
灰度图:只有一个通道0-255,所以一共有256种颜色
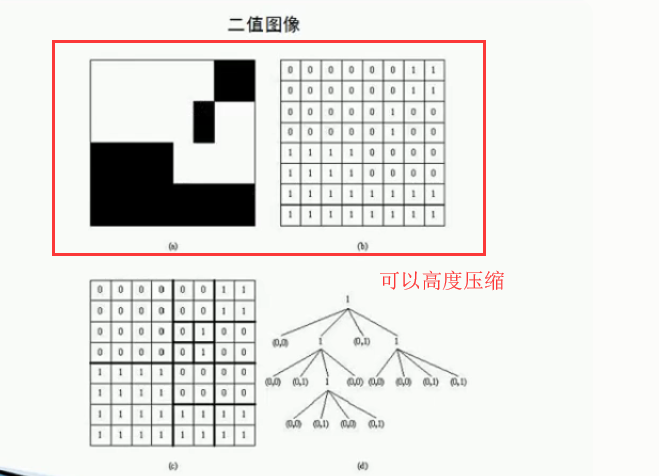
二值图像:只有两种颜色,黑色和白色,二值化就是把图像的像素转变为0或者255,只有这两个像素值。0白色 1黑色 。0是黑色,255是白色。
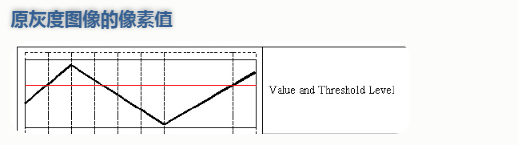
2.图像二值化
(1)先获取阈值

(2)根据阈值去二值化图

(3)threshold函数
ret, dst = cv2.threshold(src, thresh, maxval, type)- src: 输入图,只能输入单通道图像,通常来说为灰度图
- dst: 输出图
- thresh: 阈值
- maxval: 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值
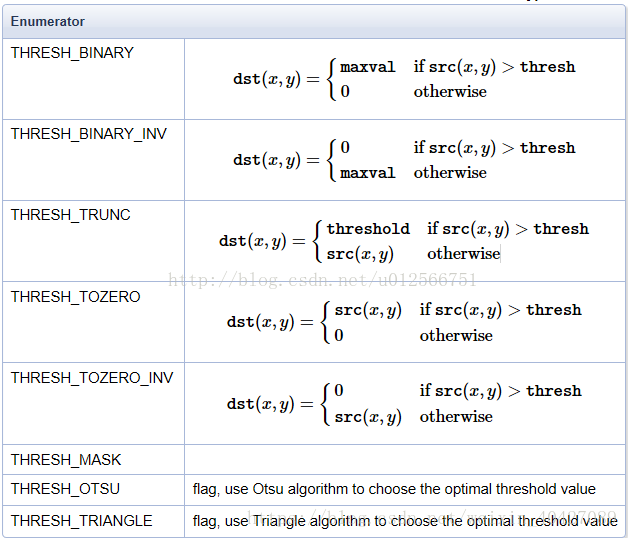
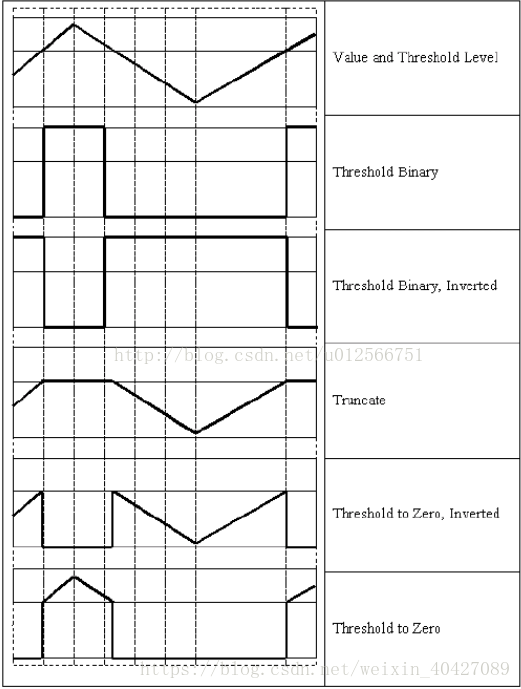
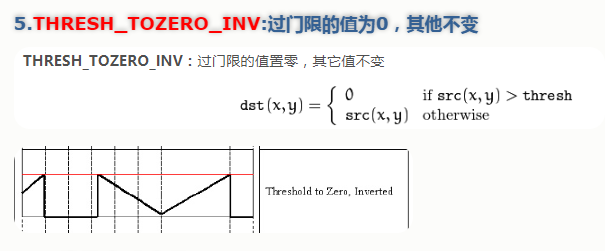
- type:二值化操作的类型,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV

(4)全局阈值 -代码实现
1 # -*- coding=GBK -*-
2 import cv2 as cv
3 import numpy as np
4
5
6 #图像二值化 0白色 1黑色
7 #全局阈值
8 def threshold_image(image):
9 gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
10 cv.imshow("原来", gray)
11
12 ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)#大律法,全局自适应阈值 参数0可改为任意数字但不起作用
13 print("阈值:%s" % ret)
14 cv.imshow("OTSU", binary)
15
16 ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_TRIANGLE)#TRIANGLE法,,全局自适应阈值, 参数0可改为任意数字但不起作用,适用于单个波峰
17 print("阈值:%s" % ret)
18 cv.imshow("TRIANGLE", binary)
19
20 ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_BINARY)# 自定义阈值为150,大于150的是白色 小于的是黑色
21 print("阈值:%s" % ret)
22 cv.imshow("自定义", binary)
23
24 ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_BINARY_INV)# 自定义阈值为150,大于150的是黑色 小于的是白色
25 print("阈值:%s" % ret)
26 cv.imshow("自定义反色", binary)
27
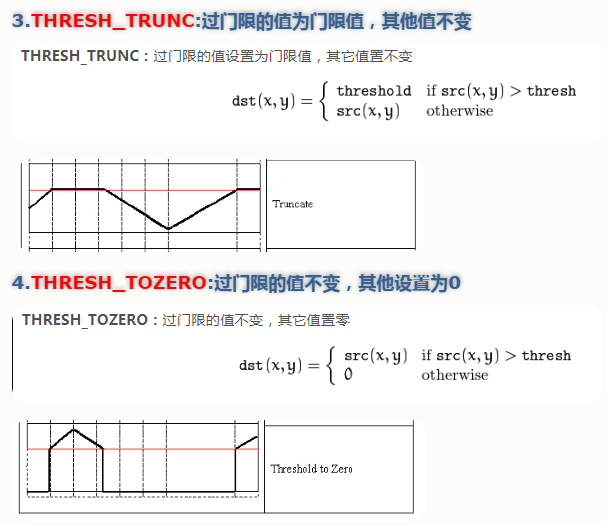
28 ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_TRUNC)# 截断 大于150的是改为150 小于150的保留
29 print("阈值:%s" % ret)
30 cv.imshow("截断1", binary)
31
32 ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_TOZERO)# 截断 小于150的是改为150 大于150的保留
33 print("阈值:%s" % ret)
34 cv.imshow("截断2", binary)
35
36 src = cv.imread("C://1.jpg")
37 threshold_image(src)
38 cv.waitKey(0)
39 cv.destroyAllWindows()
函数threshold()的参数说明:
cv.THRESH_BINARY | cv.THRESH_OTSU)#大律法,全局自适应阈值 参数0可改为任意数字但不起作用
cv.THRESH_BINARY | cv.THRESH_TRIANGLE)#TRIANGLE法,,全局自适应阈值, 参数0可改为任意数字但不起作用,适用于单个波峰
cv.THRESH_BINARY)# 自定义阈值为150,大于150的是白色 小于的是黑色
cv.THRESH_BINARY_INV)# 自定义阈值为150,大于150的是黑色 小于的是白色
cv.THRESH_TRUNC)# 截断 大于150的是改为150 小于150的保留
cv.THRESH_TOZERO)# 截断 小于150的是改为150 大于150的保留
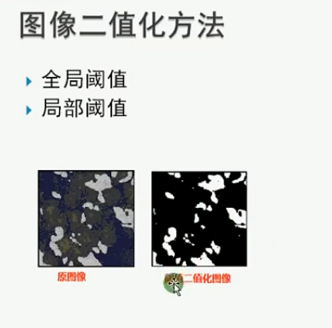
(5)局部阈值 -代码实现
自适应阈值二值化函数根据图片一小块区域的值来计算对应区域的阈值,从而得到也许更为合适的图片。
dst = cv2.adaptiveThreshold(src, maxval, thresh_type, type, Block Size, C)- src: 输入图,只能输入单通道图像,通常来说为灰度图
- dst: 输出图
- maxval: 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值
- thresh_type: 阈值的计算方法,包含以下2种类型:cv2.ADAPTIVE_THRESH_MEAN_C; cv2.ADAPTIVE_THRESH_GAUSSIAN_C.
- type:二值化操作的类型,与固定阈值函数相同,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV.
- Block Size: 图片中分块的大小,必须为奇数
- C :阈值计算方法中的常数项
1 #局部阈值
2 def local_image(image):
3 gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
4 cv.imshow("原来", gray)
5 binary1 = cv.adaptiveThreshold(gray, 255, cv.ADAPTIVE_THRESH_MEAN_C, cv.THRESH_BINARY, 25, 10) #blocksize必须为奇数
6 cv.imshow("局部1", binary1)
7 binary2 = cv.adaptiveThreshold(gray, 255, cv.ADAPTIVE_THRESH_GAUSSIAN_C, cv.THRESH_BINARY, 25, 10)#高斯处理
8 cv.imshow("局部2", binary2)
(6)自己计算阈值-代码实现
图像的长宽以及灰度、RGB图像的像素原理分布
https://blog.csdn.net/qq_29540745/article/details/70256722
1 # -*- coding=GBK -*-
2 import cv2 as cv
3 import numpy as np
4
5
6 #求出图像均值作为阈值来二值化
7 def custom_image(image):
8 gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
9 cv.imshow("原来", gray)
10 h, w = gray.shape[:2]
11 m = np.reshape(gray, [1, w*h])#化为一维数组
12 mean = m.sum() / (w*h)
13 print("mean: ", mean)
14 ret, binary = cv.threshold(gray, mean, 255, cv.THRESH_BINARY)
15 cv.imshow("二值", binary)
16
17
18 src = cv.imread("C://1.jpg")
19 custom_image(src)
20 cv.waitKey(0)
21 cv.destroyAllWindows()
参考:
https://blog.csdn.net/u011321546/article/details/79593195
https://www.cnblogs.com/ssyfj/p/9272615.html
python实现图像二值化的更多相关文章
- opencv python:图像二值化
import cv2 as cv import numpy as np import matplotlib.pyplot as plt # 二值图像就是将灰度图转化成黑白图,没有灰,在一个值之前为黑, ...
- Python+OpenCV图像处理(十)—— 图像二值化
简介:图像二值化就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程. 一.普通图像二值化 代码如下: import cv2 as cv import numpy ...
- [python-opencv]图像二值化【图像阈值】
图像二值化[图像阈值]简介: 如果灰度图像的像素值大于阈值,则为其分配一个值(可以是白色255),否则为其分配另一个值(可以是黑色0) 图像二值化就是将灰度图像上的像素值设置为0或255,也就是将整个 ...
- 致敬学长!J20航模遥控器开源项目计划【开局篇】 | 先做一个开机界面 | MATLAB图像二值化 | Img2Lcd图片取模 | OLED显示图片
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/C ...
- C# 指针操作图像 二值化处理
/// <summary> /// 二值化图像 /// </summary> /// <param name="bmp"></param& ...
- openCV_java 图像二值化
较为常用的图像二值化方法有:1)全局固定阈值:2)局部自适应阈值:3)OTSU等. 局部自适应阈值则是根据像素的邻域块的像素值分布来确定该像素位置上的二值化阈值.这样做的好处在于每个像素位置处的二值化 ...
- MATLAB:图像二值化、互补图(反运算)(im2bw,imcomplement函数)
图像二值化.反运算过程涉及到im2bw,imcomplement函数,反运算可以这么理解:原本黑的区域变为白的区域,白的区域变为黑的区域. 实现过程如下: close all; %关闭当前所有图形窗口 ...
- OpenCV_基于局部自适应阈值的图像二值化
在图像处理应用中二值化操作是一个很常用的处理方式,例如零器件图片的处理.文本图片和验证码图片中字符的提取.车牌识别中的字符分割,以及视频图像中的运动目标检测中的前景分割,等等. 较为常用的图像二值化方 ...
- Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化 [函数名称] P分位法图像二值化 [算法说明] 所谓P分位法图像分割,就是在知道图像中目标所占的比率Rat ...
随机推荐
- Java AES 加密小试牛刀
目录 问题出处 解决方法 方法一 方法二 方法三 补充 总结 在java开发过程中,很多时候我们都需要加密数据,例如声音.敏感信息等.我们通常使用的是 MD5加密.SHA加密.DES 加密.AES 加 ...
- logstash输出到rabbitmq
场景 将应用日志文件发送到rabbitmq. filebeat 不支持rabbitmq作为输出.因此,需要先将文件由filebeat发送到logstash ,再由logstash 输出到rabbitm ...
- IEEE 754 浮点数加减运算
电子科技大学 - 计算机组成原理 小数的十进制和二进制转换 移码 定义:[X]移 = X + 2n ( -2n ≤ X < 2n ) X为真值,n为整数的位数 数值位和X的补码相同,符号位与补码 ...
- django通过管理页上传图片
1.配置目录 新建上传录.static/medis 2.设置上传文件保存路径 # setting.py中设置上传文件路径static/media MEDIA_ROOT = os.path.join(B ...
- the Agiles Scrum Meeting 11
会议时间:2020.4.20 20:00 1.每个人的工作 在这次例会上,我们对上周完成的工作进行了总结. 本周已完成的工作 个人结对项目增量开发组 tq: 创建广播功能 修复纯英文数字可能溢出bug ...
- [Beta]the Agiles Scrum Meeting 7
会议时间:2020.5.21 20:00 1.每个人的工作 今天已完成的工作 成员 已完成的工作 issue yjy 暂无 tq 新增功能:添加.选择.展示多个评测机,对新增功能进行测试 评测部分增加 ...
- 2019OO第三单元作业总结
OO第三单元的作业主题是JML规格化设计,作业以图及图的最短路径相关计算为载体,体现接口的规格化设计. ------------------------------------------------ ...
- SpringBoot整合多个RabbitMQ
一.背景 最近项目中需要用到了RabbitMQ来监听消息队列,监听的消息队列的 虚拟主机(virtualHost)和队列名(queueName)是不一致的,但是接收到的消息格式相同的.而且可能还存 ...
- STM32直流电机启动(一)驱动电路的介绍
驱动电路 典型的H桥驱动电路如下:要使电机旋转只需导通对角线上的两个三极管即可,如导通Q1,Q4,关闭Q2,Q4即可驱动电机正转:若想电机反向转动,即导通三极管Q2,Q3,关闭Q1,Q4.此时电路图可 ...
- Machine learning(3-Linear Algebra Review )
1.Matrices and vectors Matrix :Rectangular array of numbers a notation R3×3 Vector : An n×1 matrix t ...