【翻译】Kinect v2程序设计(C++) Body 篇
Kinect SDK v2预览版的主要功能的使用介绍,基本上完成了。这次,是关于取得Body(人体姿势)方法的说明。
Body

// Sensor
IKinectSensor* pSensor; ……
HRESULT hResult = S_OK;
hResult = GetDefaultKinectSensor( &pSensor ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : GetDefaultKinectSensor" << std::endl;
return -;
}
hResult = pSensor->Open(); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::Open()" << std::endl;
return -;
}
// Source
IBodyFrameSource* pBodySource; ……
hResult = pSensor->get_BodyFrameSource( &pBodySource ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_BodyFrameSource()" << std::endl;
return -;
}
// Reader
IBodyFrameReader* pBodyReader; ……
hResult = pBodySource->OpenReader( &pBodyReader ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IBodyFrameSource::OpenReader()" << std::endl;
return -;
}
// Coordinate Mapper
ICoordinateMapper* pCoordinateMapper; ……
hResult = pSensor->get_CoordinateMapper( &pCoordinateMapper ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_CoordinateMapper()" << std::endl;
return -;
}
int width = ;
int height = ;
unsigned int bufferSize = width * height * * sizeof( unsigned char );
cv::Mat bufferMat( height, width, CV_8UC4 );
cv::Mat bodyMat( height / , width / , CV_8UC4 );
cv::namedWindow( "Body" );
// Color Table
cv::Vec3b color[];
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
while( ){
// Color Frame ……1
IColorFrame* pColorFrame = nullptr;
hResult = pColorReader->AcquireLatestFrame( &pColorFrame );
if( SUCCEEDED( hResult ) ){
hResult = pColorFrame->CopyConvertedFrameDataToArray( bufferSize, reinterpret_cast<BYTE*>( bufferMat.data ), ColorImageFormat_Bgra );
if( SUCCEEDED( hResult ) ){
cv::resize( bufferMat, bodyMat, cv::Size(), 0.5, 0.5 );
}
}
SafeRelease( pColorFrame );
/* Body部分在列表1.6 */
// Show Window
cv::imshow( "Body", bodyMat );
if( cv::waitKey( ) == VK_ESCAPE ){
break;
}
}
列表1.5,相当于图1「Frame」,「Data」的部分(第1部分)
// Body Frame
IBodyFrame* pBodyFrame = nullptr; ……
hResult = pBodyReader->AcquireLatestFrame( &pBodyFrame ); ……
if( SUCCEEDED( hResult ) ){
IBody* pBody[BODY_COUNT] = { }; ……
hResult = pBodyFrame->GetAndRefreshBodyData( BODY_COUNT, pBody ); ……
if( SUCCEEDED( hResult ) ){
for( int count = ; count < BODY_COUNT; count++ ){
BOOLEAN bTracked = false; ……
hResult = pBody[count]->get_IsTracked( &bTracked ); ……
if( SUCCEEDED( hResult ) && bTracked ){
Joint joint[JointType::JointType_Count]; ……
hResult = pBody[count]->GetJoints( JointType::JointType_Count, joint ); ……
if( SUCCEEDED( hResult ) ){
// Left Hand State
HandState leftHandState = HandState::HandState_Unknown; ……
hResult = pBody[count]->get_HandLeftState( &leftHandState ); ……
if( SUCCEEDED( hResult ) ){
ColorSpacePoint colorSpacePoint = { }; ……
hResult = pCoordinateMapper->MapCameraPointToColorSpace( joint[JointType::JointType_HandLeft].Position, &colorSpacePoint ); ……
if( SUCCEEDED( hResult ) ){
int x = static_cast<int>( colorSpacePoint.X );
int y = static_cast<int>( colorSpacePoint.Y );
if( ( x >= ) && ( x < width ) && ( y >= ) && ( y < height ) ){
if( leftHandState == HandState::HandState_Open ){ ……
cv::circle( bufferMat, cv::Point( x, y ), , cv::Scalar( , , ), , CV_AA );
}
else if( leftHandState == HandState::HandState_Closed ){ ……
cv::circle( bufferMat, cv::Point( x, y ), , cv::Scalar( , , ), , CV_AA );
}
else if( leftHandState == HandState::HandState_Lasso ){ ……
cv::circle( bufferMat, cv::Point( x, y ), , cv::Scalar( , , ), , CV_AA );
}
}
}
}
// Right Hand State
/* 和左手一样,获取右手Hand State绘制状态。 */
// Joint ……9
for( int type = ; type < JointType::JointType_Count; type++ ){
ColorSpacePoint colorSpacePoint = { };
pCoordinateMapper->MapCameraPointToColorSpace( joint[type].Position, &colorSpacePoint );
int x = static_cast< int >( colorSpacePoint.X );
int y = static_cast< int >( colorSpacePoint.Y );
if( ( x >= ) && ( x < width ) && ( y >= ) && ( y < height ) ){
cv::circle( bufferMat, cv::Point( x, y ), , static_cast<cv::Scalar>( color[count] ), -, CV_AA );
}
}
}
}
}
cv::resize( bufferMat, bodyMat, cv::Size(), 0.5, 0.5 );
}
}
SafeRelease( pBodyFrame );
| Kinect SDK v1 | Kinect SDK v2预览版 | |
|---|---|---|
| 名称 | Skeleton | Body |
| 人体姿勢可以取得的人数 | 2人 | 6人 |
| Joint(关节) | 20处 | 25处 |
| Hand State(手的状態) | 2種類 | 3種類 |
| Hand State可以取得的人数 | 2人 | 2人 |
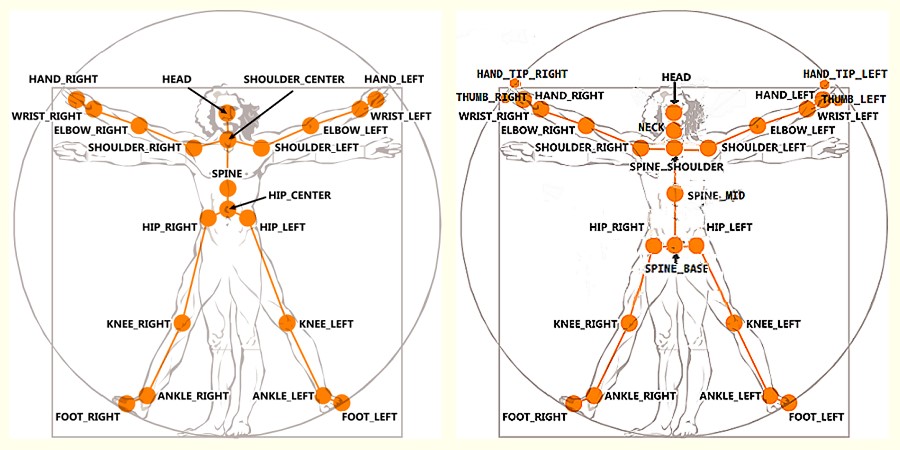

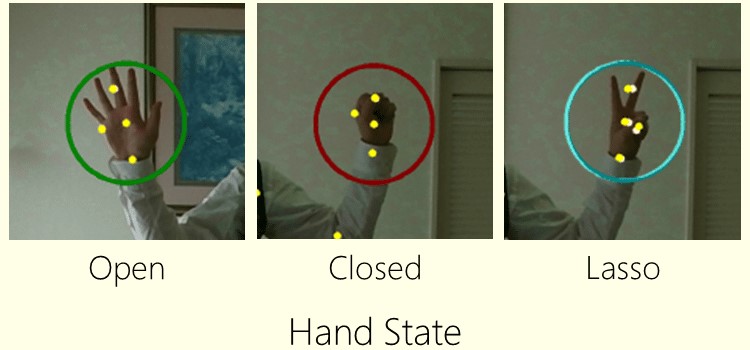
图4 Hand State的识别结果
【翻译】Kinect v2程序设计(C++) Body 篇的更多相关文章
- 【翻译】Kinect v2程序设计(C++-) AudioBeam篇
Kinect v2,Microphone Array可以用来对于水平面音源方向的推测(AudioBeam)和语音识别(Speech Recognition).这一节是介绍如何取得AudioBeam. ...
- 【翻译】Kinect v2程序设计(C++) BodyIndex篇
通过Kinect SDK v2预览版,取得BodyIndex(人体区域)的方法和示例代码. 上一节,介绍了从Kinect v2预览版用Kinect SDK v2预览版获取Depth数据的方法. 这 ...
- 【翻译】Kinect v2程序设计(C++) Color篇
Kinect SDK v2预览版,获取数据的基本流程的说明.以及取得Color图像的示例程序的介绍. 上一节,是关于当前型号Kinect for Windows(后面称作Kinect v1)和次世代型 ...
- 【翻译】Kinect v2程序设计(C++) Depth编
Kinect SDK v2预览版,取得Depth数据的方法说明. 上一节,介绍了通过使用Kinect for Windows SDK v2预览版(以下简称为,Kinect SDK v2预览版)从Kin ...
- 【翻译】Kinect v1和Kinect v2的彻底比较
本连载主要是比较Kinect for Windows的现行版(v1)和次世代型的开发者预览版(v2),以C++开发者为背景介绍进化的硬件和软件.本文主要是对传感的配置和运行条件进行彻底的比较. ...
- 【计算机视觉】深度相机(五)--Kinect v2.0
原文:http://blog.csdn.NET/qq1175421841/article/details/50412994 ----微软Build2012大会:Kinect for Windows P ...
- Kinect v2.0 for windows开发环境说明
官方文档里是这些: Supported Operating Systems and Architectures The following operating systems and architec ...
- Kinect v2(Microsoft Kinect for Windows v2 )配置移动电源解决方案
Kinect v2配置移动电源解决方案 Kinect v2如果用于移动机器人上(也可以是其他应用场景),为方便有效地展开后续工作,为其配置移动电源是十分必要的. 一.选择移动电源 Kinect v2原 ...
- Ubuntu_ROS中应用kinect v2笔记
Ubuntu_ROS中应用kinect v2笔记 个人觉得最重要的资料如下: 1. Microsoft Kinect v2 Driver Released http://www.ros.org/new ...
随机推荐
- Fresco 源码分析(一) DraweeView-DraweeHierarchy-DraweeController(MVC) DraweeView的分析
4. Fresco的内容 为了方便学习,我们先从使用结合官方的文档来分析 4.1 Fresco客户端的使用 在使用Fresco的使用,我们直接使用的是SimpleDraweeView这个类,然后在Ac ...
- tar -cvPf new.tar `rpm -ql vsftpd` 建议不要用绝对路径'/'
tar -cvPf new.tar `rpm -ql vsftpd` 解压这样的压缩包,会在当前用户的家目录下解压:~./xxxx;加参数-C :tar -xvf xxx.tar -C / ;来指定 ...
- php 获取当前时间
<?php echo $showtime=date("Y-m-d H:i:s");?>
- 关于PHP数组转字符串详细介绍
随着时代的发展,我们的开发技术也随着更新,对于PHP还是比较常用的,于是我研究了一下PHP数组转字符串,在这里拿出来和大家分享一下,希望对大家有用. 经常需要使用PHP处理字符string,PHP内置 ...
- Digital Image Processing 学习笔记2
第二章 2.1视觉感知要素 2.1.1 人眼的结构 眼睛由角膜与巩膜外壳.脉络膜和视网膜包围,晶状体由通信的纤维细胞层组成,并由附在睫状体上的纤维悬挂:视网膜上分布两类光感受器(锥状体和杆状体),他们 ...
- 【Log4j2 配置详解】log4j2的资源文件具体怎么配置
可以先附上一个log4j2的资源文件详细内容,对照着看 ### set log levels ### log4j.rootLogger = INFO , C , D , E ### console # ...
- GPS基础
public class MainActivity extends Activity { private LocationManager manager; private List<String ...
- lr数据库参数化取数:The query result is empty and same is the parameter file问题原因
出现这个问题的原因: 是因为我们的查询结果存在中文 如果查询结果没有中文,显示正常 解决办法: 新建一个数据源: 重新再选择这个数据源,再次查询: 说明不是连接字符串的问题或者是mysql驱动的问题 ...
- Codeforces Round #293 (Div. 2)
A. Vitaly and Strings 题意:两个字符串s,t,是否存在满足:s < r < t 的r字符串 字符转处理:字典序排序 很巧妙的方法,因为s < t,只要找比t字典 ...
- 水题 ZOJ 3875 Lunch Time
题目传送门 /* 水题:找排序找中间的价格,若有两个,选价格大的: 写的是有点搓:) */ #include <cstdio> #include <iostream> #inc ...