机器学习进阶-案例实战-图像全景拼接-图像全景拼接(RANSCA) 1.sift.detectAndComputer(获得sift图像关键点) 2.cv2.findHomography(计算单应性矩阵H) 3.cv2.warpPerspective(获得单应性变化后的图像) 4.cv2.line(对关键点位置进行连线画图)
1. sift.detectAndComputer(gray, None) # 计算出图像的关键点和sift特征向量
参数说明:gray表示输入的图片
2.cv2.findHomography(kpA, kpB, cv2.RANSAC, reproThresh) # 计算出单应性矩阵
参数说明:kpA表示图像A关键点的坐标, kpB图像B关键点的坐标, 使用随机抽样一致性算法来进行迭代,reproThresh表示每次抽取样本的个数
3.cv2.warpPespective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0])) # 获得根据单应性矩阵变化后的图像
参数说明:image表示输入图像,H表示单应性的矩阵,(imageA.shape[1] + imageB.shape[1], imageA.shape[0])表示矩阵变化后的维度
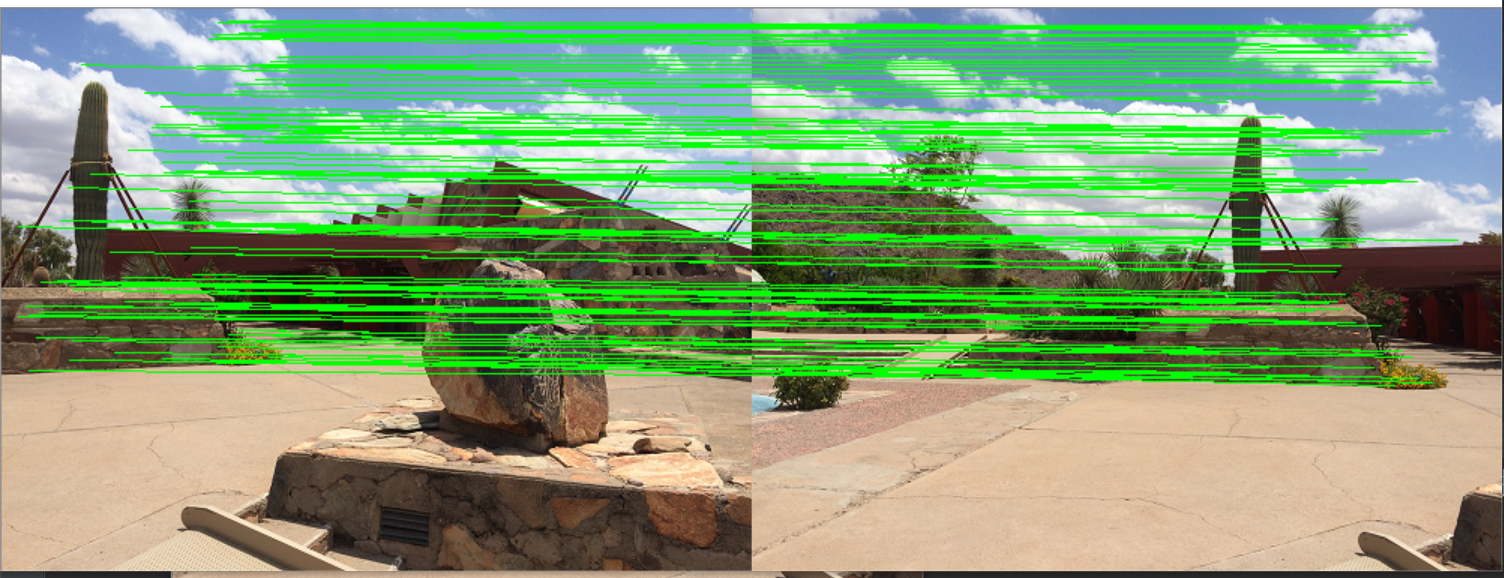
4. cv2.line(imageA, kpsA, imageB, kpsB, (0,0,255), 2) 进行画出直线的操作
参数说明:imageA和imageB表示输入图片, kpsA和kpsB表示关键点的坐标(x, y) ,(0, 0, 255)表示颜色, 2表示直线的宽度
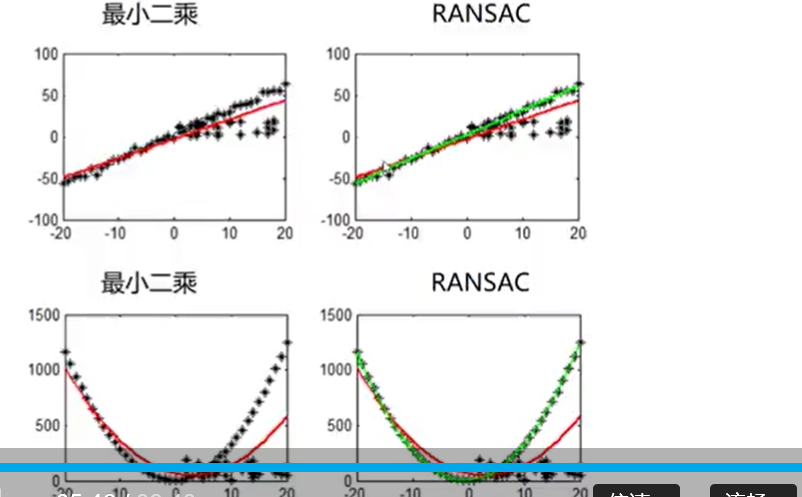
RANSAC算法(随机抽样一致性算法), 对于左边的图,可以看到使用最小二乘法尽可能多的满足点可以分布在拟合曲线周围,减小均分根误差,因此拟合的曲线在一定程度上容易发生偏离,而RANSAC却不会出现这种情况
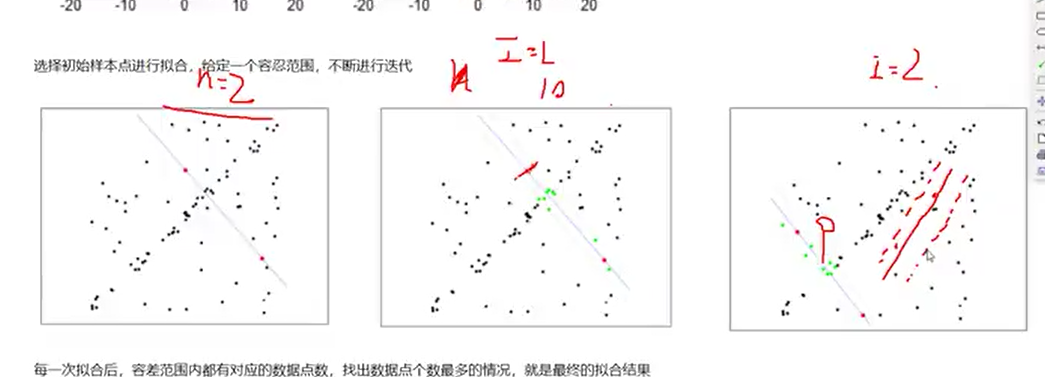
RANSCA原理, 因为拟合一条直线只需要两个点,因此我们每次随机选取两个点,做出直线,划定一个距离,判断落在直线周围距离范围点的个数,不断的迭代,直到找出拟合的直线,使得点落在上面最多的拟合曲线
图像拼接的关键是在于对图像进行变化,变化后的点与需要拼接的图片中的sift点,越接近,即欧式距离越短,对图像拼接的过程中,至少需要有4对特征点,求取变化矩阵Hi
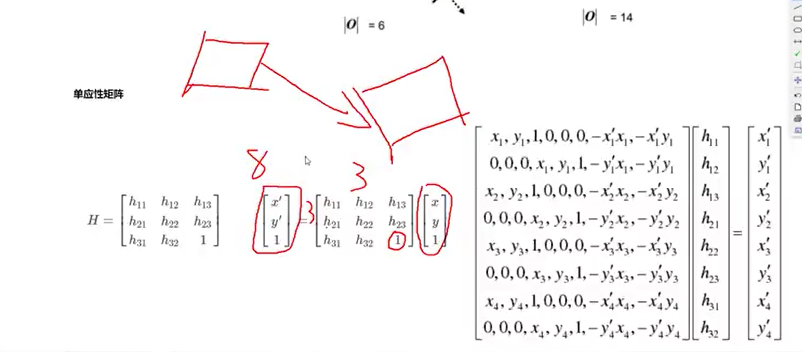
我们使用RANSAC不断去取随机从两个图像中取4对的sift特征点,计算出H,定义损失值,即x’,与x的距离,即y‘与y的距离之和是否是最小值,不断迭代,找出最佳的H
上述就是计算出来了H值,也就是变化矩阵
代码思路:
第一步:对图像进行灰度化,使用sift.detectAndCompute(image, None) 进行ksp关键点,dpSIFT特征向量,将kps进行向量化操作,即kps.pt
第二步:构建BMFmatch匹配器,获得符合条件的匹配值,matches获得的是ksp关键点的匹配值得索引,使用索引获得符合条件的kspA和kspB
第三步:使用cv2.findHomography(kpA, kpB, cv2.RANSAC,reproThresh) 随机抽取4个点,求得最合适的H变化矩阵
第四步:使用获得的变化矩阵H, cv.warpPerspective 对imageA求取变化后的图像
第五步:将imageB加入到变化后的图像获得最终图像
第六步:如果需要进行展示,构造新的图像,尺寸为imageA.shape[0], imageB.shape[1] +imageA.shape[1], 使用matches的索引,使用cv2.line将符合条件的点进行连接
第七步:返回最终的结果,进行画图展示
import cv2
import numpy as np
import matplotlib.pyplot as plt class Stitcher: def stitch(self, imgs, ratio=0.75, reproThresh=4, showMathes = False): (imageB, imageA) = imgs
# 第一步:计算kpsA和dpsA
(kpsA, dpsA) = self.detectandcompute(imageA)
(kpsB, dpsB) = self.detectandcompute(imageB)
# 获得变化的矩阵H
M = self.matchKeypoint(kpsA, dpsA, kpsB, dpsB, ratio, reproThresh) if M is None:
return None
(matches, H, status) = M # 第四步:使用cv2.warpPerspective获得经过H变化后的图像
result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageB.shape[0])) # 第五步:将图像B填充到进过H变化后的图像,获得最终的图像
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB if showMathes:
# 第六步:对图像的关键点进行连接
via = self.showMatches(imageA, imageB, kpsA, kpsB, matches, status) return (via, result) return result # 进行画图操作 def showMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
# 将两个图像进行拼接
# 根据图像的大小,构造全零矩阵
via = np.zeros((max(imageB.shape[0], imageA.shape[0]), imageA.shape[1] + imageB.shape[1], 3), np.uint8)
# 将图像A和图像B放到全部都是零的图像中
via[0:imageA.shape[0], 0:imageA.shape[1]] = imageA
via[0:imageB.shape[0], imageA.shape[1]:] = imageB
# 根据matches中的索引,构造出点的位置信息
for (trainIdx, queryIdx), s in zip(matches, status):
if s==1:
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0] + imageA.shape[1]), int(kpsB[trainIdx][1]))
# 使用cv2.line进行画图操作
cv2.line(via, ptA, ptB, (0, 255, 0), 1) return via def matchKeypoint(self, kpsA, dpsA, kpsB, dpsB, ratio, reproThresh): # 第二步:实例化BFM匹配, 找出符合添加的关键点的索引
bf = cv2.BFMatcher() matcher = bf.knnMatch(dpsA, dpsB, 2) matches = [] for match in matcher: if len(match) == 2 and match[0].distance < match[1].distance * ratio:
# 加入match[0]的索引
matches.append((match[0].trainIdx, match[0].queryIdx))
#第三步:使用cv2.findHomography找出符合添加的H矩阵
if len(matches) > 4:
# 根据索引找出符合条件的位置
kpsA = np.float32([kpsA[i] for (_, i) in matches])
kpsB = np.float32([kpsB[i] for (i, _) in matches])
(H, status) = cv2.findHomography(kpsA, kpsB, cv2.RANSAC, reproThresh) return (matches, H, status)
return None def cv_show(self, img, name):
cv2.imshow(name, img) def detectandcompute(self, image):
# 进行灰度值转化
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#实例化sift函数
sift = cv2.xfeatures2d.SIFT_create()
# 获得kps关键点和dps特征向量sift
kps, dps = sift.detectAndCompute(gray, None)
# 获得特征点的位置信息, 并转换数据类型
kps = np.float32([kp.pt for kp in kps]) return (kps, dps)


使用cv2.warpPesctive即根据H变化后的图片 经过图像拼接后的result图片 经过图片关键点连接的图片
机器学习进阶-案例实战-图像全景拼接-图像全景拼接(RANSCA) 1.sift.detectAndComputer(获得sift图像关键点) 2.cv2.findHomography(计算单应性矩阵H) 3.cv2.warpPerspective(获得单应性变化后的图像) 4.cv2.line(对关键点位置进行连线画图)的更多相关文章
- 机器学习进阶-案例实战-答题卡识别判 1.cv2.getPerspectiveTransform(获得投射变化后的H矩阵) 2.cv2.warpPerspective(H获得变化后的图像) 3.cv2.approxPolyDP(近似轮廓) 4.cv2.threshold(二值变化) 7.cv2.countNonezeros(非零像素点个数)6.cv2.bitwise_and(与判断)
1.H = cv2.getPerspectiveTransform(rect, transform_axes) 获得投射变化后的H矩阵 参数说明:rect表示原始的位置左上,右上,右下,左下, tra ...
- 机器学习进阶-案例实战-图像全景拼接-书籍SIFT特征点连接 1.cv2.drawMatches(对两个图像的关键点进行连线操作)
1.cv2.drawMatches(imageA, kpsA, imageB, kpsB, matches[:10], None, flags=2) # 对两个图像关键点进行连线操作 参数说明:im ...
- 机器学习进阶-案例实战-停车场车位识别-keras预测是否停车站有车
import numpy import os from keras import applications from keras.preprocessing.image import ImageDat ...
- webpack4入门到进阶案例实战课程
愿景:"让编程不在难学,让技术与生活更加有趣" 更多教程请访问xdclass.net 第一章 webpack4前言 第一集 webpack4入门到进阶案例实战课程介绍 简介:讲述w ...
- 机器学习进阶-项目实战-信用卡数字识别 1.cv2.findContour(找出轮廓) 2.cv2.boudingRect(轮廓外接矩阵位置) 3.cv2.threshold(图片二值化操作) 4.cv2.MORPH_TOPHAT(礼帽运算突出线条) 5.cv2.MORPH_CLOSE(闭运算图片内部膨胀) 6. cv2.resize(改变图像大小) 7.cv2.putText(在图片上放上文本)
7. cv2.putText(img, text, loc, text_font, font_scale, color, linestick) # 参数说明:img表示输入图片,text表示需要填写的 ...
- 机器学习进阶-直方图与傅里叶变换-傅里叶变换(高低通滤波) 1.cv2.dft(进行傅里叶变化) 2.np.fft.fftshift(将低频移动到图像的中心) 3.cv2.magnitude(计算矩阵的加和平方根) 4.np.fft.ifftshift(将低频和高频移动到原来位置) 5.cv2.idft(傅里叶逆变换)
1. cv2.dft(img, cv2.DFT_COMPLEX_OUTPUT) 进行傅里叶变化 参数说明: img表示输入的图片, cv2.DFT_COMPLEX_OUTPUT表示进行傅里叶变化的方法 ...
- 机器学习进阶-目标跟踪-KCF目标跟踪方法 1.cv2.multiTracker_create(构造选框集合) 2. cv2.TrackerKCF_create(获得KCF追踪器) 3. cv2.resize(变化图像大小) 4.cv2.selectROI(在图像上框出选框)
1. tracker = cv2.multiTracker_create() 获得追踪的初始化结果 2.cv2.TrackerKCF_create() 获得KCF追踪器 3.cv2.resize(fr ...
- 机器学习进阶-图像基本操作-数值计算 1.cv2.add(将图片进行加和) 2.cv2.resize(图片的维度变换) 3.cv2.addWeighted(将图片按照公式进行重叠操作)
1.cv2.add(dog_img, cat_img) # 进行图片的加和 参数说明: cv2.add将两个图片进行加和,大于255的使用255计数 2.cv2.resize(img, (500, ...
- 机器学习进阶-背景建模-(帧差法与混合高斯模型) 1.cv2.VideoCapture(进行视频读取) 2.cv2.getStructureElement(构造形态学的卷积) 3.cv2.createBackgroundSubtractorMOG2(构造高斯混合模型) 4.cv2.morpholyEx(对图像进行形态学的变化)
1. cv2.VideoCapture('test.avi') 进行视频读取 参数说明:‘test.avi’ 输入视频的地址2. cv2.getStructureElement(cv2.MORPH_E ...
随机推荐
- CSS3 圆角(border-radius)
值:半径的长度 前缀 -moz(例如 -moz-border-radius)用于Firefox -webkit(例如:-webkit-border-radius)用于Safari和Chrome. 例1 ...
- PAT 乙级 1072 开学寄语(20 分)
1072 开学寄语(20 分) 下图是上海某校的新学期开学寄语:天将降大任于斯人也,必先删其微博,卸其 QQ,封其电脑,夺其手机,收其 ipad,断其 wifi,使其百无聊赖,然后,净面.理发.整衣, ...
- 基于scroll的吸顶效果
本次要实现的是一种常见的网页效果,如下: 页面由头部,导航,主体内容三部分组成,当页面发生滚动时,头部逐渐隐藏,导航部分向上移动,直到导航部分距离浏览器顶部为零时,导航部分固定不动,保持吸顶效果,如下 ...
- 字符串分割split()
知识讲解: split() 方法将字符串分割为字符串数组,并返回此数组. 语法: stringObject.split(separator,limit) 参数说明: 注意:如果把空字符串 (" ...
- Jmeter(三十八)Jmeter Question 之 ‘批量执行SQL语句’
知识使我们变得玩世不恭,智慧使我们变得冷酷无情,我们思考的太多,感知太少,除了机器,我们更需要人性,除了智慧,我们需要仁慈和善良. ------出自查理卓别林的演讲 前面有提到Jmeter使用JDBC ...
- [UE4]游戏主循环
游戏的运行模型 理解游戏的运行模型,对处理很多游戏错误有非常大的帮助. 游戏是有一个主循环的.那么游戏主循环做了什么事情呢? 游戏主循环一次就表示一帧,游戏主循环包括:接受输入.处理游戏逻辑.渲染.S ...
- [UE4]需要保存的数据
数据存储原则是“相关的放在一起,不相关的分开”. 如果存档有几十上百兆,如果放在一起存储容易出现问题(特别是网络游戏):断线.电脑死机.游戏出错等等,存档就会损坏,所以一定要分割存储.
- dropdownlist 绑定方法
this.ddlUnit.SelectedValue = id; //注意大小写,如果选中失败会显示默认值. ListItem item=ddlUnit.Items.FindByValue(id); ...
- javascript将list转换成树状结构
/** * 将list装换成tree * @param {Object} myId 数据主键id * @param {Object} pId 数据关联的父级id * @param {Object} l ...
- (转) C#之VS自带RDLC报表学习
原文地址:http://blog.csdn.net/hk_5788/article/details/49846905 原文工具VS2010,测试版本工具VS2013 报表是这样设计的: 看看结果: ...