[LeetCode] 62. 不同路径 ☆☆☆(动态规划)
描述
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
问总共有多少条不同的路径?
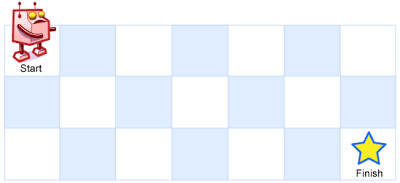
例如,上图是一个7 x 3 的网格。有多少可能的路径?
说明:m 和 n 的值均不超过 100。
示例 1:
输入: m = 3, n = 2
输出: 3
解释:
从左上角开始,总共有 3 条路径可以到达右下角。
1. 向右 -> 向右 -> 向下
2. 向右 -> 向下 -> 向右
3. 向下 -> 向右 -> 向右
示例 2:
输入: m = 7, n = 3
输出: 28
解析
应该是很明显的DP算法了。到达右下角的路径数有2个部分:右下角左边的路径数 + 左下角上边的路径数。
即dp[m][n] = dp[m][n - 1] + dp[m - 1][n]。(m行 n列)
边界值,第一行、第一列都为1,因为只有1种走法。
代码
public int uniquePaths(int m, int n) {
if (m <= 0 || n <= 0) {
return 0;
}
int[][] array = new int[m][n];
for (int i = 0; i < m; i++) {
array[i][0] = 1;
}
for (int i = 0; i < n; i++) {
array[0][i] = 1;
}
for (int ii = 1; ii < m; ii++) {
for (int kk = 1; kk < n; kk++) {
array[ii][kk] = array[ii - 1][kk] + array[ii][kk - 1];
}
}
return array[m - 1][n - 1];
}
优化:画图后发现(动归要多画图),其实每次计算都只用了当前行和上一行。可以将二维数组变为一维数组。
dp[m][n] = dp[m][n - 1] + dp[m - 1][n],可以变为dp[i] = dp[i] + dp[i - 1]
public static int uniquePaths1(int m, int n) {
if (m <= 0 || n <= 0) {
return 0;
}
int[] dp = new int[n];// 用列初始化
// 初始化
for (int i = 0; i < n; i++) {
dp[i] = 1;
}
// 公式:dp[i] = dp[i-1] + dp[i]
for (int i = 1; i < m; i++) {//还是需要双层循环的,画图即知 比如m = 3, n = 2
dp[0] = 1; // 第 i 行第 0 列的初始值
for (int j = 1; j < n; j++) {
dp[j] = dp[j - 1] + dp[j];
}
}
return dp[n - 1];
}
[LeetCode] 62. 不同路径 ☆☆☆(动态规划)的更多相关文章
- Java实现 LeetCode 62 不同路径
62. 不同路径 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为"Start" ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中 ...
- LeetCode 62,从动态规划想到更好的解法
本文始发于个人公众号:TechFlow,原创不易,求个关注 今天是LeetCode专题第36篇文章,我们一起来看下LeetCode的62题,Unique Paths. 题意 其实这是一道老掉牙的题目了 ...
- LeetCode.62——不同路径
问题描述: 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为"Start" ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为 ...
- leetcode 62. 不同路径(C++)
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为“Finish”). 问总共有多 ...
- LeetCode 62.不同路径(C++)
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ). 机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角(在下图中标记为“Finish”). 问总共有多 ...
- LeetCode 62 不同路径
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ).机器人每次只能向下或者向右移动一步.机器人试图达到网格的右下角.问总共有多少条不同的路径? 示例 1: 输入: ...
- Leetcode之动态规划(DP)专题-62. 不同路径(Unique Paths)
Leetcode之动态规划(DP)专题-62. 不同路径(Unique Paths) 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” ). 机器人每次只能向下或者向 ...
- leetcode 64. 最小路径和 动态规划系列
目录 1. leetcode 64. 最小路径和 1.1. 暴力 1.2. 二维动态规划 2. 完整代码及执行结果 2.1. 执行结果 1. leetcode 64. 最小路径和 给定一个包含非负整数 ...
- leetcode刷题-- 5. 动态规划
动态规划思路 参考 状态转移方程: 明确「状态」-> 定义dp数组/函数的含义 -> 明确「选择」-> 明确 base case 试题 53最大子序和 题目描述 53 给定一个整数数 ...
随机推荐
- 搭建redis cluster集群服务
redis 5.0以下为ruby编写,运行命令时需要安装ruby,而5.0以上则为c编写,可直接安装后运行.因此本文使用redis5.0.5 1.编写配置文件 在 /home 下新建 redis-cl ...
- 蓝绿部署、A/B测试以及灰度发布(金丝雀发布)
过去的10多年里,很多大公司都在使用蓝绿部署,安全.可靠是这种部署方式的特点.蓝绿部署虽然算不上”Sliver Bullet“,但确实很实用.在有关于“微服务”.“DevOps”.“Cloud-nat ...
- 备忘-VSCODE、apache配置
一个像素点的光标:https://files.cnblogs.com/files/zjfree/mouse.zip VSCODE配置备忘: { "editor.fontLigatures&q ...
- shell 判断一个字符串是否由字母数字组成
摘自:http://blog.51cto.com/lynnteng0/804520 describe="it's a describe by yourself" if echo & ...
- EasyNVR网页Chrome无插件播放摄像机视频功能二次开发之云台控制接口示例代码
随着多媒体技术和网络通信技术的迅速发展,视频监控技术在电力系统.电信行业.工业监控.工地.城市交通.水利系统.社区安防等领域得到越来越广泛的应用.摄像头直播视频监控通过网络直接连接,可达到的世界任何角 ...
- 【视频开发】RTSP SERVER(基于live555)详细设计
/* *本文基于LIVE555的嵌入式的RTSP流媒体服务器一个设计文档,个中细节现剖于此,有需者可参考指正,同时也方便后期自己查阅.(本版本是基于2011年的live555) 作者:llf_17@q ...
- QT5.10+MinGW+OpenCV3.4.2编译
一.准备工作: (1)在OpenCV官网下载3.4.2版本(注意选择Win pack),https://opencv.org/releases.html. (2)下载Contrib模块,https:/ ...
- VS2013+OpenCV3.4.2编译
一.准备工作: (1)在OpenCV官网下载3.4.2版本(注意选择Win pack),https://opencv.org/releases.html. (2)下载Contrib模块,https:/ ...
- Qt信号-槽原理剖析--(2)自己实现信号槽
时间乃是最大的革新家--培根 先了解一下相关宏: qt为c++增加的相关宏:signals, slots,emit 在qt的预编译过程中,这些宏会被替换. 1)#define signals publ ...
- [转帖]Redis性能解析--Redis为什么那么快?
Redis性能解析--Redis为什么那么快? https://www.cnblogs.com/xlecho/p/11832118.html echo编辑整理,欢迎转载,转载请声明文章来源.欢迎添加e ...