Deep Learning专栏--强化学习之MDP、Bellman方程(1)
本文主要介绍强化学习的一些基本概念:包括MDP、Bellman方程等, 并且讲述了如何从 MDP 过渡到 Reinforcement Learning。
1. 强化学习基本概念
这里还是放上David Silver的课程的图,可以很清楚的看到整个交互过程。这就是人与环境交互的一种模型化表示,在每个时间点,大脑agent会从可以选择的动作集合A中选择一个动作$a_t$执行。环境则根据agent的动作给agent反馈一个reward $r_t$,同时agent进入一个新的状态。
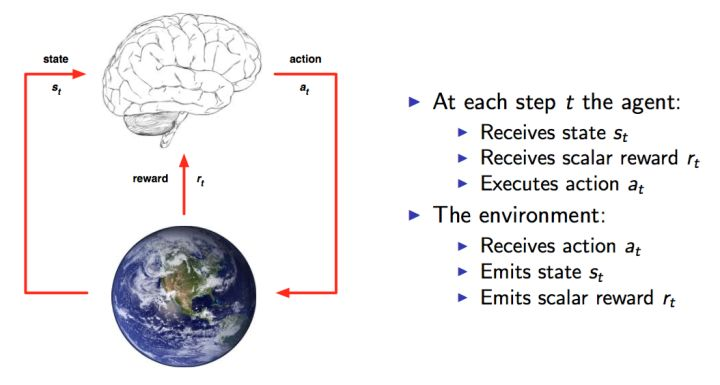
根据上图的流程,任务的目标就出来了,那就是要能获取尽可能多的Reward。Reward越多,就表示执行得越好。每个时间片,agent根据当前的状态来确定下一步的动作。也就是说我们需要一个state找出一个action,使得reward最大,从 state 到 action 的过程就称之为一个策略Policy,一般用$\pi $表示。
强化学习的任务就是找到一个最优的策略Policy从而使Reward最多。
在运行强化学习算法之前,首先需要得到一系列的状态,动作和反馈,这个过程通常是agent随机得到的:
$$ (s_1,a_1,r_1,s_2,a_2,r_2,…s_t,a_t,r_t) $$
这就是一系列的样本Sample。强化学习的算法就是需要根据这些样本来改进Policy,从而使得得到的样本中的Reward更好。
由于这种让Reward越来越好的特性,所以这种算法就叫做强化学习Reinforcement Learning。
2. MDP(Markov Decision Process)
强化学习的问题都可以模型化为MDP(马尔可夫决策过程)的问题,MDP 实际上是对环境的建模;MDP 与常见的 Markov chains 的区别是加入了action 和 rewards 的概念。
因此,一个基本的 MDP 可以用一个五元组$(S,A,P,R, \gamma)$表示,其中:
- $S$是一个有限状态集;
- $A$是一个有限动作集;
- $P$是一个状态转移概率矩阵,$P_a(s, s′)=P(s_{t+1}=s′|s_t=s, a_t=a)$表示在状态$s$下执行动作$a$后转移到状态 $s′$的概率;
- $R$是一个奖励函数,$R_a(s, s′)$ 表示在状态 $s$ 下执行动作 $a$ 后转移到状态 $s′$ 所得到的即时回报(reward);
- $\gamma$是一个折扣因子,一般取值在 [0,1];用来区分当前回报和未来回报的重要性,一般会加在未来的回报前,减小未来回报的权重。
因此,MDP 的核心问题就是找到一个策略 $\pi(s)$ 来决定在状态 $s$ 下选择哪个动作,这种情况下MDP就变成了一个 Markov chain,且此时的目标跟我们前面提到的强化学习的目标是一致的。
3. 回报与价值函数
状态的好坏等价于对未来回报的期望。因此,引入回报(Return) 来表示某个时刻$t$的状态将具备的回报:
$$ G_t = R_{t+1} + \gamma R_{t+2} + … = \sum_{k=0}^\infty\gamma^kR_{t+k+1} $$
上面 $R$ 是 Reward 反馈,$\gamma$ 是 discount factor(折扣因子),跟前面 MDP 中的符号的含义一致。
从上面的式子可以, 除非整个过程结束,否则我们无法获取所有的 reward 来计算出每个状态的 Return,因此,再引入一个概念:价值函数(value function),记为 $V(s)$,通过 $V(s)$ 来表示一个状态未来的潜在价值。从定义上看,value function 就是回报的期望:
$$ V(s) = \mathbb E[G_t|S_t = s] $$
引出价值函数,对于获取最优的策略Policy这个目标,我们就可以通过估计 value function 来间接获得优化的策略。道理很简单,通过价值函数可以知道每一种状态的好坏,这样我们就知道该怎么选择了(如选择动作使得下一状态的潜在价值最大),而这种选择就是我们想要的策略。
我们需要估算 Value Function,只要能够计算出价值函数,那么最优决策也就得到了。因此,问题就变成了如何计算Value Function?
根据前面 $G_t$ 和 $V(s)$ 的定义,有:
$$ \begin{align} V(s) & = \mathbb E[G_t|S_t = s]\\ & = \mathbb E[R_{t+1}+\gamma R_{t+2} + \gamma ^2R_{t+3} + …|S_t = s]\\ & = \mathbb E[R_{t+1}+\gamma (R_{t+2} + \gamma R_{t+3} + …)|S_t = s]\\ & = \mathbb E[R_{t+1}+\gamma G_{t+1}|S_t = s]\\ & = \mathbb E[R_{t+1}+\gamma v(S_{t+1})|S_t = s] \end{align} $$
则有:
$$ V(s) = \mathbb E[R_{t+1} + \gamma V(S_{t+1})|S_t = s] $$
上面这个公式就是Bellman方程的基本形态。从公式上看,当前状态的价值和下一步的价值以及当前的反馈Reward有关, 其中透出的含义就是价值函数的计算可以通过迭代的方式来实现。
4. 从 MDP 到 Reinforcement Learning
回到 MDP 问题,如果我们知道了转移概率 $P$ 和奖励函数 $R$,那么便可通过下面的方法求出最优策略 $\pi(s)$, 首先,结合上面提到的价值函数和Bellman方程有:
公式1:
$$ \pi(s):=\arg \max_a\ {\sum_{s’}P_{a}(s,s’)(R_{a}(s,s’)+\gamma V(s’))} $$
公式2:
$$ V(s) := \sum_{s’}P_{\pi(s)}(s,s’)(R_{\pi(s)}(s,s’) + \gamma V(s’)) $$
公式 1 表示在状态 $s$ 下的采取的最优动作,公式 2 表示在状态 $s$ 下的价值,可以看到两者有依存关系;
而在 转移概率 $P$ 和奖励函数 $R$已知的情况下,求解 MDP 问题常见做法有 Value iteration 或 Policy iteration.
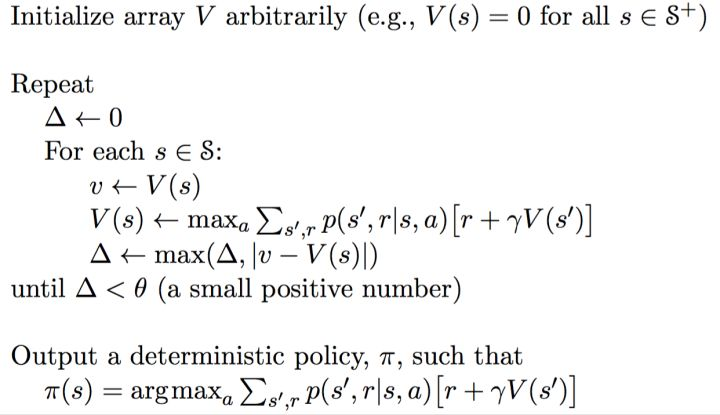
4.1 Value iteration
在 Value iteration 中,策略函数 $\pi$ 没有被使用,迭代公式如下:
$$ V_{i+1}(s) := \max_a \sum_{s’} P_a(s,s’)(R_a(s,s’) + \gamma V_i(s’)) $$
下标 $i$ 表示第 $i$ 次迭代,在每轮迭代中需要计算每个状态的价值,并且直到两次迭代结果的差值小于给定的阈值才能认为是收敛。
计算的出收敛的价值函数后,通过公式1就能够得出策略函数 $\pi$ 了,其迭代过程如下图所示:
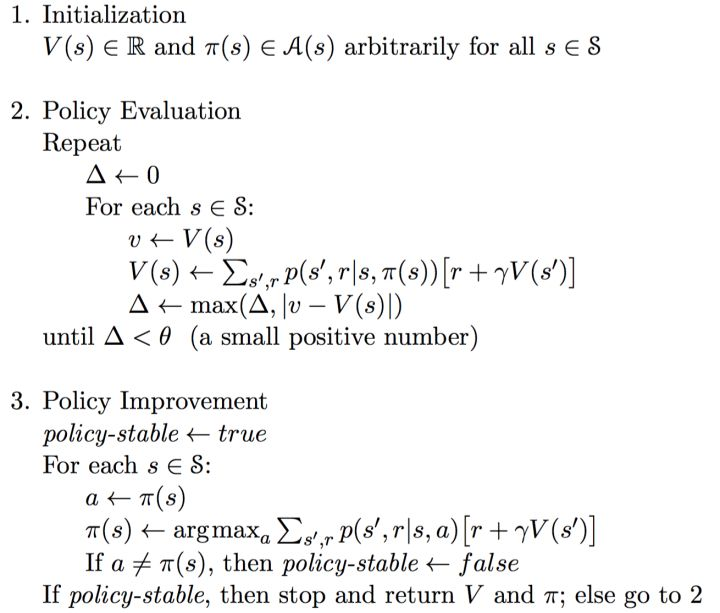
4.2 Policy iteration
Policy iteration同时更新价值 $V$ 和策略 $\pi$, 且一般可分成两步:
Policy Evaluation,策略评估,就是上面公式2的过程。目的是在策略固定的情况下更新Value Function 直到 value 收敛,从另一个角度来讲就是为了更好地估计基于当前策略的价值
Policy Improvement,策略改进,就是上面公式1的过程。就是根据更新后的 Value Function 来更新每个状态下的策略直到策略稳定
这个方法本质上就是使用当前策略($\pi$)产生新的样本,然后使用新的样本更好的估计策略的价值($V(s)$),然后利用策略的价值更新策略,然后不断反复。理论可以证明最终策略将收敛到最优.
具体的算法流程如下所示:
4.3 区别与局限
问题来了,上面的 Policy Iteration 和 Value Iteration有什么区别, 为什么一个叫policy iteration,一个叫value iteration?
原因其实很好理解,policy iteration 最后收敛的 value $V$ 是当前 policy 下的 value 值(也做对policy进行评估),目的是为了后面的policy improvement得到新的policy;所以是在显式地不停迭代 policy。
而value iteration 最后收敛得到的 value 是当前state状态下的最优的value值。当 value 最后收敛,那么最优的policy也就得到的。虽然这个过程中 policy 在也在隐式地更新,但是一直在显式更新的是 value,所以叫value iteration。
从上面的分析看,value iteration 较 之policy iteration更直接。不过问题也都是一样,都需要知道转移概率 $P$ 和奖励函数 $R$。
但是对于 Reinforcement Learning 这一类问题,转移概率 $P$ 往往是不知道,知道转移概率 $P$ 也就称为获得了模型 Model,这种通过模型来获取最优动作的方法也就称为 Model-based 的方法。但是现实情况下,很多问题是很难得到准确的模型的,因此就有 Model-free 的方法来寻找最优的动作,像 Q-learning,Policy Gradient,Actor Critic这一类方法都是 model-free 的。
前面的方法问题是需要已知转移概率 $P$, 目的是为了遍历当前状态后的所有可能的状态,因此如果采用贪婪的思想,那么就不需要不遍历后面所有的状态,而是直接采取价值最大的状态动作来执行。
Q-learning 实际上就是采用这种思想的,Q-Learning的基本思想是根据 value iteration 得到的,但要明确一点是 value iteration 每次都对所有的Q值更新一遍,也就是所有的状态和动作。但事实上在实际情况下我们没办法遍历所有的状态,还有所有的动作,因此,我们只能得到有限的系列样本。具体的算法流程会再下一篇文章具体介绍。
综上,本文主要介绍了强化学习的任务和一些概念,以及从 MDP 如何过渡到 Reinforcement,在后续的文章中会介绍value-based的Q-learning 和DQN方法,Policy gradient 类方法以及结合两者的 Actor Critic 及DDPG方法。
参考资料:
2. DQN 从入门到放弃4 动态规划与Q-Learning
Deep Learning专栏--强化学习之MDP、Bellman方程(1)的更多相关文章
- Deep Learning专栏--强化学习之从 Policy Gradient 到 A3C(3)
在之前的强化学习文章里,我们讲到了经典的MDP模型来描述强化学习,其解法包括value iteration和policy iteration,这类经典解法基于已知的转移概率矩阵P,而在实际应用中,我们 ...
- Deep learning with Python 学习笔记(1)
深度学习基础 Python 的 Keras 库来学习手写数字分类,将手写数字的灰度图像(28 像素 ×28 像素)划分到 10 个类别 中(0~9) 神经网络的核心组件是层(layer),它是一种数据 ...
- Deep Learning 19_深度学习UFLDL教程:Convolutional Neural Network_Exercise(斯坦福大学深度学习教程)
理论知识:Optimization: Stochastic Gradient Descent和Convolutional Neural Network CNN卷积神经网络推导和实现.Deep lear ...
- Deep Learning 13_深度学习UFLDL教程:Independent Component Analysis_Exercise(斯坦福大学深度学习教程)
前言 理论知识:UFLDL教程.Deep learning:三十三(ICA模型).Deep learning:三十九(ICA模型练习) 实验环境:win7, matlab2015b,16G内存,2T机 ...
- Deep Learning(深度学习)学习笔记整理
申明:本文非笔者原创,原文转载自:http://www.sigvc.org/bbs/thread-2187-1-3.html 4.2.初级(浅层)特征表示 既然像素级的特征表示方法没有作用,那怎样的表 ...
- Deep Learning(深度学习)学习笔记整理系列之(五)
Deep Learning(深度学习)学习笔记整理系列 zouxy09@qq.com http://blog.csdn.net/zouxy09 作者:Zouxy version 1.0 2013-04 ...
- 【转载】Deep Learning(深度学习)学习笔记整理
http://blog.csdn.net/zouxy09/article/details/8775360 一.概述 Artificial Intelligence,也就是人工智能,就像长生不老和星际漫 ...
- (转) 基于Theano的深度学习(Deep Learning)框架Keras学习随笔-01-FAQ
特别棒的一篇文章,仍不住转一下,留着以后需要时阅读 基于Theano的深度学习(Deep Learning)框架Keras学习随笔-01-FAQ
- Deep Learning(深度学习)相关网站
Deep Learning(深度学习) ufldl的2个教程(这个没得说,入门绝对的好教程,Ng的,逻辑清晰有练习):一 ufldl的2个教程(这个没得说,入门绝对的好教程,Ng的,逻辑清晰有练习): ...
随机推荐
- 开发技术--浅谈python数据类型
开发|浅谈python数据类型 在回顾Python基础的时候,遇到最大的问题就是内容很多,而我的目的是回顾自己之前学习的内容,进行相应的总结,所以我就不玩基础了,很多在我实际生活中使用的东西,我会在文 ...
- SPC软控件提供商NWA的产品在各行业的应用(生命科学行业)
在上一篇文章中,我们提到了NWA软件产品在各行业都有广泛的应用,并且就化工行业的应用展开了详细介绍.而在本文中,您将看到NWA产品在生命科学行业也扮演着不可替代的角色. Northwest Analy ...
- 【Java】简体中文、繁体中文转换
项目中用到繁体中文语言适配,目前已经有开源的框架可以将简体中文转换成繁体中文,在此基础上封装了一个工具类,可以直接将简体中文的strings.xml转换成繁体中文的strings.xml. 引用Jar ...
- 剑指offer 9-10:青蛙跳台阶与Fibonacii数列
题目描述 一只青蛙一次可以跳上1级台阶,也可以跳上2级.求该青蛙跳上一个n级的台阶总共有多少种跳法(先后次序不同算不同的结果). 问题分析 我们将跳法个数y与台阶数n视为一个函数关系,即y=f(n). ...
- 2.监控软件zabbix-客户端安装
环境准备 Zabbix-Agent只要http://www.zabbix.com/download.php中可以下载的Zabbix-Agent均可以搭建Zabbix-Agent环境,本文选用CentO ...
- c++的explicit理解
默认规定 只有一个参数的构造函数也定义了一个隐式转换,将该构造函数对应数据类型的数据转换为该类对象 explicit class A { explicit A(int n); A(char *p); ...
- 3.dubbo 负载均衡策略和集群容错策略都有哪些?动态代理策略呢?
作者:中华石杉 面试题 dubbo 负载均衡策略和集群容错策略都有哪些?动态代理策略呢? 面试官心理分析 继续深问吧,这些都是用 dubbo 必须知道的一些东西,你得知道基本原理,知道序列化是什么协议 ...
- PL/SQL Developer报错 ORA-12154:tns:could not resolve the connect identifier specified
PL/SQL Developer使用预先配置数据库报错 ORA-12154:tns:could not resolve the connect identifier specified. 情况描述:我 ...
- Python语言基础04-构造程序逻辑
本文收录在Python从入门到精通系列文章系列 学完前面的几个章节后,博主觉得有必要在这里带大家做一些练习来巩固之前所学的知识,虽然迄今为止我们学习的内容只是Python的冰山一角,但是这些内容已经足 ...
- JS高阶---作用域面试
面试题1: ,答案为10 有一点需要明确:作用域是在定义编写代码时已经决定好的 面试题2: 结果1: 结果2: 首先在内部作用域找,没有 然后在全局作用域找,window没有,所以会报错 如果想找对象 ...