STM32 PWM的输出与Keil软件仿真
导读:PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。 PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,广泛应用在从测量、通信到功率控制与变换的许多领域中。
本文引用地址:http://www.eepw.com.cn/article/272990.htm
PWM是什么——PWM原理
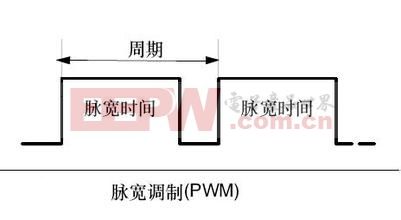
脉宽调制(PWM)基本原理:控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率。

例如,把正弦半波波形分成N等份,就可把正弦半波看成由N个彼此相连的脉冲所组成的波形。这些脉冲宽度相等,都等于 ∏/n ,但幅值不等,且脉冲顶部不是水平直线,而是曲线,各脉冲的幅值按正弦规律变化。如果把上述脉冲序列用同样数量的等幅而不等宽的矩形脉冲序列代替,使矩形脉冲的中点和相应正弦等分的中点重合,且使矩形脉冲和相应正弦部分面积(即冲量)相等,就得到一组脉冲序列,这就是PWM波形。可以看出,各脉冲宽度是按正弦规律变化的。根据冲量相等效果相同的原理,PWM波形和正弦半波是等效的。对于正弦的负半周,也可以用同样的方法得到PWM波形。
在PWM波形中,各脉冲的幅值是相等的,要改变等效输出正弦波的幅值时,只要按同一比例系数改变各脉冲的宽度即可,因此在交-直-交变频器中,PWM逆变电路输出的脉冲电压就是直流侧电压的幅值。
根据上述原理,在给出了正弦波频率,幅值和半个周期内的脉冲数后,PWM波形各脉冲的宽度和间隔就可以准确计算出来。按照计算结果控制电路中各开关器件的通断,就可以得到所需要的PWM波形。
下图为输出时的PWM波的实时波形。

PWM是什么——特点
PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换,让信号保持为数字形式可将噪声影响降到最小。噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。
对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将PWM用于通信的主要原因。从模拟信号转向PWM可以极大地延长通信距离。在接收端,通过适当的RC或LC网络可以滤除调制高频方波并将信号还原为模拟形式。
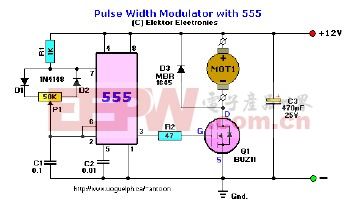
由NE555产生的PWM调速系统
总之,PWM既经济、节约空间、抗噪性能强,是一种值得广大工程师在许多设计应用中使用的有效技术。
STM32 PWM的输出
脉冲宽度模式(PWM模式)可以用来产生一个由TIMx_ARR寄存器确定平率,由TIMx_CCRx寄存器确定占空比的信号。在STM32开发中,由于官方提供了较为完善的库函数,使得我们的开发工作变得相当的轻松,甚至可以在不需要太多了解硬件结构的条件下,完成我的开发工作,实现我们所需要的功能。在此,笔者也建议大家,在初学的时候尽量去熟悉固件库中提供的函数来调节PWM的频率和占空比,对底层寄存器的操作应尽量减少。
本文使用的STM32F103RB的芯片,输出通道是TIM2_CH2通道,STM32有较强的可移植性,如果读者的芯片类型跟我不一样,可以做适当的修改,完成自己的开发。
使用到的库函数有:
stm32f10x.h:用以系统的初始化,无论做什么开发,该库必须包含
stm32f10x_tim.h:TIM定时器库函数
stm32f10x_rcc.h:时钟配置库函数
stm32f10x_gpio.h:GPIO配置库函数
由以上的库函数可知,我们需要初始化的内容有TIM2定时器,时钟使能配置,GPIO的使能配置。
void RCC_Config(void);
void GPIO_Config(void);
void TIM_Config(void);接下来就是编写各个函数的函数体,在这些内容里面,其实官方已经给出了示例,我们按照官方给的函数库进行配置,然后修改一下官方的一些变量属性即可。
RCC_Config函数体
void RCC_Config(void)
{
//使能GPIOA,TIM2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
}GPIO_Config函数体
void GPIO_Config(void)
{
//GPIO的配置,官方库有给出需要配置的一些参数,如果忘记了,参照一下即可,我这里配置的是GPIOA_Pin_1
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
}TIM_Config函数体
在配置函数体之前,先了解一下stm32的占空比以及频率是如何计算的
①频率:我们使用的APB1时钟源是72MHz的,在此我们不做分频,通过配置相关的参数来设置输入频率,计算方法:输入频率=APB1时钟/(预分频系数+1)=72000000Hz/360=200000Hz
②TIM_TImeBaseStructure.TIM_Period参数决定了输出PWM波形的频率,输出PWM波形的频率=定时器的输入频率/TIM_TImeBaseStructure.TIM_Period,本例程20000Hz/100=200Hz,即5ms一个周期
③配置占空比:占空比=配置占空比的值/ TIM_TImeBaseStructure.TIM_Period,以此计算来确定占空比,本案例的占空比为50/100=50%
④定时器使能
void TIM_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TImeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//配置TIM2的时钟输出频率,以及其它相关参数初始化
TIM_TImeBaseStructure.TIM_Prescaler=360-1;//设置PWM的频率
TIM_TImeBaseStructure.TIM_CounterMode=0;
TIM_TImeBaseStructure.TIM_Period=100;
TIM_TimeBaseInit(TIM2,&TIM_TImeBaseStructure);
//设置PWM的输出方式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;
//配置占空比
TIM_OCInitStructure.TIM_Pulse=50;
TIM_OC2Init(TIM2,&TIM_OCInitStructure);
TIM_ForcedOC1Config(TIM2,TIM_ForcedAction_Active);
TIM_Cmd(TIM2,ENABLE);
TIM_CtrlPWMOutputs(TIM2,ENABLE);
}由此,我们的整个PWM配置完成
Main函数
int main()
{
RCC_Config();
GPIO_Config();
TIM_Config();
while(1)
{
;
}
}接下来,我们讲解一下,在Keil里面看我们的GPIOA_Pin_1引脚的输出频率,波形
Keil软件仿真
①配置调试工具

②打开调试,并设置并检测GPIO的输出引脚 


③全速运行,观察示波器 

STM32 PWM的输出与Keil软件仿真的更多相关文章
- 单片机Keil软件仿真与调试技巧
一.引言 单片机软件开发过程中,软件调试遇到的各种问题常令初学者感到不知所措.实际上.各种仿真开发软件的程序调试基本方法和技巧大同小异,掌握正确的程序调试基本技巧.对于排查这些程序错误问题可以起到举一 ...
- STM32 Keil 软件仿真设置
设置 Dialog.DLL 分别为:DARMSTM.DLL和TARMSTM.DLL, Parameter 均为:-pSTM32F103RC,用于设置支持芯片的软硬件仿真
- KEIL软件仿真死在等待外部晶振起振
这是由于是Debug里面的设置有问题 主要是下面2项设置 Dialog DLL默认是DCM3.DLL Parameter默认是-pCM3 应改为 Dialog DLL默认是DARMSTM.DLL Pa ...
- stm32 MDK5软件仿真之查看io口输出
软件MDK5 stm32的pack 打开MDK,添加工程 一.首先找到Project的Options选项,里面的Debug选为Use Simulator,也就是选择软件仿真. 然后再Logic ...
- stm32 PWM输出学习
STM32 的定时器除了 TIM6 和 7,其他的定时器都可以用来产生 PWM 输出.其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出.通用定时器也能同时产生多达 4路 ...
- STM32之PWM波形输出配置总结
一. TIMER分类: STM32中一共有11个定时器,其中TIM6.TIM7是基本定时器:TIM2.TIM3.TIM4.TIM5是通用定时器:TIM1和TIM8是高级定时器,以及2个看门狗定时器 ...
- Keil软仿真STM32
当使用Keil软仿真STM32时,SystemClock设置为72MHz,使用循环延迟1s钟,实际时间明显大于1S钟,但是Keil调试窗口显示的确实是1s钟//毫秒级的延时void delay_ms( ...
- STM32 mdk软件仿真时过不去时钟的问题
stm32的程序用MDK软件仿真时,由于系统时钟初始化函数里有个等待系统时钟准备好的循环,所以过不去. 设置方式如下:这么设置之后仿真时就可以直接进入main函数了.
- STM32软件仿真的一个注意点
最近才做的板子由于自己的粗心把串口线搞反了,还好只有两条,飞线解决,而且现在还只是样板,但是还是应该引以为戒,以后做硬件一定要谨慎. 今天同事出差把CAN分析仪拿走了,本来在开发板上调试好的程序不知为 ...
随机推荐
- Android开发优化之——对界面UI的优化(1)
在Android应用开发过程中,屏幕上控件的布局代码和程序的逻辑代码通常是分开 的.界面的布局代码是放在一个独立的xml文件中的,这个文件里面是树型组织的,控制着页面的布局.通常,在这个页面中会用到很 ...
- iOS 获得通讯录中联系人的所有属性--b
ABAddressBookRef addressBook = ABAddressBookCreate(); CFArrayRef results = ABAddressBookCopyArrayOfA ...
- DirectX.DirectSound声音播放资料
参考:https://msdn.microsoft.com/en-us/library/windows/desktop/bb318665(v=vs.85).aspx Microsoft DirectS ...
- 将textarea滚动至底部:
var textarea = document.getElementById('id');textarea.scrollTop = textarea.scrollHeight;
- MFC的CListCtrl双击获取单元格的行列
首先要把ClistCtrl设置为整选中模式和网格模式 SetExtendedStyle(LVS_EX_GRIDLINES|LVS_EX_FULLROWSELECT); 重写方法如下: void CAl ...
- php调试函数
void debug_print_backtrace ([ int $options = 0 [, int $limit = 0 ]] ) array debug_backtrace ([ int $ ...
- [Jobdu] 题目1348:数组中的逆序对
题目描述: 在数组中的两个数字,如果前面一个数字大于后面的数字,则这两个数字组成一个逆序对.输入一个数组,求出这个数组中的逆序对的总数. 输入: 每个测试案例包括两行: 第一行包含一个整数n,表示数组 ...
- atitit.GUI图片非规则按钮跟动态图片切换的实现模式总结java .net c# c++ web html js
atitit.GUI图片非规则按钮跟动态图片切换的实现模式总结java .net c# c++ web html js 1. 图片按钮的效果总结 1 1.1. 按钮图片自动缩放的. 1 1.2. 不要 ...
- Python黑魔法,一行实现并行化
Python 在程序并行化方面多少有些声名狼藉.撇开技术上的问题,例如线程的实现和 GIL,我觉得错误的教学指导才是主要问题.常见的经典 Python 多线程.多进程教程多显得偏“重”.而且往往隔靴搔 ...
- libjpeg.a exists or that its path is correct
Android NDK: ERROR:/cygdrive/e/cocos2d-x/code/cocos2d-2.1rc0-x-2.1.3/HelloTest1/proj.android/../../c ...