arduino一些内容
arduino 套件使用说明书V1.0.pdf,
步进电机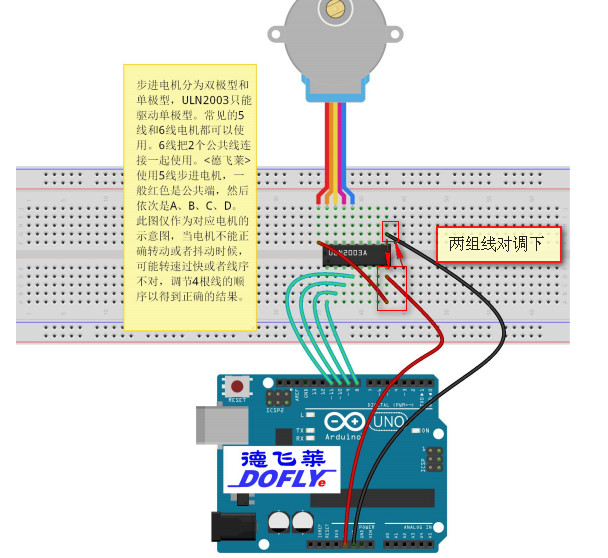
DHT11
传感器另外一脚要接A0
/*
Web client This sketch connects to a website (http://www.google.com)
using an Arduino Wiznet Ethernet shield. Circuit:
* Ethernet shield attached to pins 10, 11, 12, 13 created 18 Dec 2009
by David A. Mellis
modified 9 Apr 2012
by Tom Igoe, based on work by Adrian McEwen */ #include <SPI.h>
#include <Ethernet.h> #define DHT11_PIN 1 // Enter a MAC address for your controller below.
// Newer Ethernet shields have a MAC address printed on a sticker on the shield
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
// if you don't want to use DNS (and reduce your sketch size)
// use the numeric IP instead of the name for the server:
//IPAddress server(74,125,232,128); // numeric IP for Google (no DNS)
char server[] = "192.168.1.95"; // name address for Google (using DNS) // Set the static IP address to use if the DHCP fails to assign
IPAddress ip(,,,); // Initialize the Ethernet client library
// with the IP address and port of the server
// that you want to connect to (port 80 is default for HTTP):
EthernetClient client; void uploadData(String c,String h){
// if you get a connection, report back via serial:
if (client.connect(server, )) {
Serial.println("connected");
// Make a HTTP request:
client.println("GET /DHT11Data.ashx?C="+c+"&h="+h+" HTTP/1.1");
client.println("Host:192.168.1.95");
client.println("Connection: close"); client.println();
delay();
// if there are incoming bytes available
// from the server, read them and print them:
while (client.available()) {
char c = client.read();
Serial.print(c);
}
}
else {
// kf you didn't get a connection to the server:
Serial.println("connection failed");
} // if the server's disconnected, stop the client:
if (!client.connected()) {
Serial.println();
Serial.println("disconnecting.");
client.stop(); // do nothing forevermore: }
} byte read_dht11_dat()
{
byte i = ;
byte result = ;
for(i=;i<;i++)
{
while(!(PINC&_BV(DHT11_PIN)));
delayMicroseconds();
if(PINC&_BV(DHT11_PIN))
result|=(<<(-i));
while((PINC&_BV(DHT11_PIN)));
}
return result;
} void setup() { DDRC|=_BV(DHT11_PIN);
PORTC|=_BV(DHT11_PIN);
// Open serial communications and wait for port to open:
Serial.begin();
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
} // start the Ethernet connection:
if (Ethernet.begin(mac) == ) {
Serial.println("Failed to configure Ethernet using DHCP");
// no point in carrying on, so do nothing forevermore:
// try to congifure using IP address instead of DHCP:
Ethernet.begin(mac, ip);
}
// give the Ethernet shield a second to initialize:
delay();
Serial.println("Ready"); } void loop()
{
byte dht11_dat[];
byte dht11_in;
byte i;
PORTC &= ~_BV(DHT11_PIN);
delay();
PORTC|=_BV(DHT11_PIN);
delayMicroseconds();
DDRC &= ~_BV(DHT11_PIN);
delayMicroseconds();
dht11_in = PINC & _BV(DHT11_PIN);
if(dht11_in)
{
Serial.println("dht11 start condition 1 not met");
return;
} delayMicroseconds();
dht11_in=PINC & _BV(DHT11_PIN);
if(!dht11_in) {
Serial.println("dht11 start condition 2 not met");
return;
} delayMicroseconds();
for(i=;i<;i++)
dht11_dat[i]=read_dht11_dat();
DDRC|=_BV(DHT11_PIN);
PORTC|=_BV(DHT11_PIN);
byte dht11_check_sum = dht11_dat[]+dht11_dat[]+dht11_dat[]+dht11_dat[];
if(dht11_dat[]!=dht11_check_sum)
{
Serial.println("DHT11 checksum error");
} uploadData(String(dht11_dat[]) +"." +String(dht11_dat[]),String(dht11_dat[]) +"." +String(dht11_dat[]) ); Serial.print("Current humdity= ");
Serial.print(String(dht11_dat[]));
Serial.print(".");
Serial.print(dht11_dat[],DEC);
Serial.print("%");
Serial.print("temperature = ");
Serial.print(dht11_dat[],DEC);
Serial.print(".");
Serial.print(dht11_dat[],DEC);
Serial.println("C"); delay();
}
调整PWM频率
源代码如下:Here are some usage examples of the function: // Set pin 9's PWM frequency to 3906 Hz (31250/8 = 3906)
// Note that the base frequency for pins 3, 9, 10, and 11 is 31250 Hz
setPwmFrequency(, ); // Set pin 6's PWM frequency to 62500 Hz (62500/1 = 62500)
// Note that the base frequency for pins 5 and 6 is 62500 Hz
setPwmFrequency(, ); // Set pin 10's PWM frequency to 31 Hz (31250/1024 = 31)
setPwmFrequency(, ); Please keep in mind that changing the PWM frequency changes the Atmega's timers and disrupts the normal operation of many functions that rely on time (delay(), millis(), Servo library). /**
* Divides a given PWM pin frequency by a divisor.
*
* The resulting frequency is equal to the base frequency divided by
* the given divisor:
* - Base frequencies:
* o The base frequency for pins 3, 9, 10, and 11 is 31250 Hz.
* o The base frequency for pins 5 and 6 is 62500 Hz.
* - Divisors:
* o The divisors available on pins 5, 6, 9 and 10 are: 1, 8, 64,
* 256, and 1024.
* o The divisors available on pins 3 and 11 are: 1, 8, 32, 64,
* 128, 256, and 1024.
*
* PWM frequencies are tied together in pairs of pins. If one in a
* pair is changed, the other is also changed to match:
* - Pins 5 and 6 are paired on timer0
* - Pins 9 and 10 are paired on timer1
* - Pins 3 and 11 are paired on timer2
*
* Note that this function will have side effects on anything else
* that uses timers:
* - Changes on pins 3, 5, 6, or 11 may cause the delay() and
* millis() functions to stop working. Other timing-related
* functions may also be affected.
* - Changes on pins 9 or 10 will cause the Servo library to function
* incorrectly.
*
* Thanks to macegr of the Arduino forums for his documentation of the
* PWM frequency divisors. His post can be viewed at:
* http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1235060559/0#4
*/
void setPwmFrequency(int pin, int divisor) {
byte mode;
if(pin == || pin == || pin == || pin == ) {
switch(divisor) {
case : mode = 0x01; break;
case : mode = 0x02; break;
case : mode = 0x03; break;
case : mode = 0x04; break;
case : mode = 0x05; break;
default: return;
}
if(pin == || pin == ) {
TCCR0B = TCCR0B & 0b11111000 | mode;
} else {
TCCR1B = TCCR1B & 0b11111000 | mode;
}
} else if(pin == || pin == ) {
switch(divisor) {
case : mode = 0x01; break;
case : mode = 0x02; break;
case : mode = 0x03; break;
case : mode = 0x04; break;
case : mode = 0x05; break;
case : mode = 0x06; break;
case : mode = 0x7; break;
default: return;
}
TCCR2B = TCCR2B & 0b11111000 | mode;
}
}
关于按钮软件去抖动法
unsigned char btnIsPress=;
const int buttonPin = ; // 按键位置
const int ledPin = ; // led 位置
// 定义变量
int ledState = HIGH; // 当前led 状态
int buttonState=; // 读取的当前按键状态
int lastButtonState = ; // 上次读取的按键状态
// 使用长整型变量
long lastDebounceTime = ; // 上次按键触发时间
long debounceDelay = ; // 去抖时间,根 void setup() {
// put your setup code here, to run once: pinMode(buttonPin, INPUT);
pinMode(ledPin, OUTPUT);
// 初始化led 的状态
digitalWrite(ledPin, ledState);
Serial.begin(); } void loop() {
// put your main code here, to run repeatedly:
// checkResetPress();
checkBtnPress();
} void checkBtnPress(){
int reading = digitalRead(buttonPin); if (reading != lastButtonState) {
lastDebounceTime = millis();
} if ((millis() - lastDebounceTime) > debounceDelay) {
if (reading != buttonState) {
buttonState = reading;
if (buttonState == HIGH) {
ledState = !ledState;
}
}
} digitalWrite(ledPin, ledState);
lastButtonState = reading;
}
void checkResetPress(){
btnIsPress= digitalRead(buttonPin);
Serial.println(btnIsPress);
if(btnIsPress==){
delay();
btnIsPress= digitalRead(buttonPin);
if(btnIsPress==){
delay();
btnIsPress= digitalRead(buttonPin);
if(btnIsPress==){
Serial.println("yes!");
} }
}
}
上面代码中,if (buttonState == HIGH){ledState=!ledState;} 表示只识别脉冲的上升或阶段,因为一次按键相当于一次脉冲,有上升与下降两个边缘,
如果去掉判断,那么没次按钮时,只能发现led闪几下就又恢复原样(按前是灭还是亮)
arduino一些内容的更多相关文章
- arduino中SCoop库的简单应用案例
转载:https://www.csdn.net/gather_27/MtTaggzsMDExMS1ibG9n.html arduino中SCoop库的简单应用案例首先这篇文章来在视频https://v ...
- arduino 中通过寄存器地址访问寄存器内容
void call_func( void (*func)(void)){ (*func)(); } void setup() { // put your setup code here, to run ...
- Arduino 1602液晶屏实验和程序
在Arduino IDE中, 项目->加载库->管理库中搜索LiquidCrystal,然后安装即可 1.接线图 2.引脚图 3.最简单程序 #include <LiquidCrys ...
- Arduino下LCD1602综合探究(上)——1602的两种驱动方式,如何使LCD的控制编程变得更简单
一.前言: LCD ( Liquid Crystal Display 的简称)液晶显示器,已经逐渐替代CRT成为主流的显示设备之一,因此也成为了单片机发烧友绕不过的话题之一:而LCD1602更是很多单 ...
- 基于 Arduino 的 RFID 识别实验
http://www.it165.net/embed/html/201512/3287.html 2015年12月04日(周五) 上午 博士的智能卡实验--RFID识别实验,基于51单片机: 我们的 ...
- 如何编写自己的Arduino库?
一开始写Arduino 的时候很不习惯,没有main函数,因为好多东西都被隐藏了.一直想搞清楚,以便编写自己的库文件.于是研究一下午,下面是一些总结. Arduino工程的初步认识 一.目录规范 当你 ...
- Arduino 极速入门系列–1 点亮 LED
本篇内容为,使用 Arduino 点亮 LED 的做法示范.很简单的一个入门示范.我们让 LED 闪. 本篇使用到的工具和材料 Arduino Mini Pro 1 PCS Mini USB 数据线 ...
- 关于arduino清空串口缓存(转)
在arduino1.0之前的版本 Serial.flush()的作用是是清空串口缓存( dropping received incoming data).但在1.0之后的版本 Serial.flush ...
- NFC:Arduino、Android与PhoneGap近场通信
NFC:Arduino.Android与PhoneGap近场通信(第一本全面讲解NFC应用开发的技术著作移动智能设备近距离通信编程实战入门) [美]Tom Igoe(汤姆.伊戈),Don Colema ...
随机推荐
- MS sql 无法进行事务日志备份
问题出在:恢复模型没有设置好我们之所以要备份数据库和事务日志都是为了以防万一,用来恢复.还原数据库的,因此恢复模型必须设置好,在sql server中默认的恢复模型为"简单".一般 ...
- spring cloud: eureka搭建
1. 添加pom 依赖: <parent> <groupId>org.springframework.boot</groupId> <artifactId&g ...
- sql server判断是否为null
sql server 替换null:isnull(arg,value) 如:select isnull(price,0.0) from orders ,如果price为null的话,用0.0替换 与n ...
- 给pyspark 设置新的环境
如果是从pysparkshell里面进去,此时已经有了pyspark环境了,所以要加一个:sc.stop() from pyspark import SparkContext, SparkConfsc ...
- Interrupt handler
1.处理器上的中断硬件关系图 2. 中断处理例程 3. 顶半部与底半部
- Mysql一些记忆
mysql修改密码报错是yum 安装mysql5.7 是 出现无法登陆问题以及mysql error You must reset your password using ALTER USER sta ...
- angluarjs ng-repeat 行号
参考 https://zhidao.baidu.com/question/1882914672116911828.html $index
- 第八章 高级搜索树 (b3)B-树:查找
- SVN的基本操作
右键SVN Commit 提交成功了,我们把SVN的服务器端刷新一下 所有的操作如果只是删除本地的文件都不会影响服务器端的文件,除非右键SVN Commit删除文件或者是新增文件才会对服务器端的仓库里 ...
- Windows phone自定义控件(无外观控件)——FlipPanel
编码前 无外观自定义控件的定义在上一篇中已经有了,至于这一篇的自定义控件,比之前多加入了状态的变化,就像默认的Button具有Pressed.Normal等状态.在状态转变的同时可以加上一些动画,可以 ...