车牌定位与畸变校正(python3.7,opencv4.0)
一、前言及思路简析
目前车牌识别系统在各小区门口随处可见,识别效果貌似都还可以。查阅资料后,发现整个过程又可以细化为车牌定位、畸变校正、车牌分割和内容识别四部分。本篇随笔主要介绍车牌定位及畸变校正两部分,在python环境下通过opencv实现。
1.1 车牌定位
目前主流的车牌定位方法从大的方面来说可以分为两类:一种是基于车牌的背景颜色特征;另一种基于车牌的轮廓形状特征。基于颜色特征的又可分为两类:一种在RGB空间识别,另一种在HSV空间识别。经测试后发现,单独使用任何一种方法,效果均不太理想。目前比较普遍的做法是几种定位方法同时使用,或用一种识别,另一种验证。本文主要通过颜色特征对车牌进行定位,以HSV空间的H分量为主,以RGB空间的R分量和B分量为辅,后续再用车牌的长宽比例排除干扰。
1.2 畸变校正
在车牌的图像采集过程中,相机镜头通常都不是垂直于车牌的,所以待识别图像中车牌或多或少都会有一定程度的畸变,这给后续的车牌内容识别带来了一定的困难。因此需要对车牌进行畸变校正,消除畸变带来的不利影响。
二、代码实现
2.1 车牌定位
2.1.1 通过颜色特征选定可疑区域
取了不同光照环境下车牌的图像,截取其背景颜色,利用opencv进行通道分离和颜色空间转换,经试验后,总结出车牌背景色的以下特征:
(1)在HSV空间下,H分量的值通常都在115附近徘徊,S分量和V分量因光照不同而差异较大(opencv中H分量的取值范围是0到179,而不是图像学中的0到360;S分量和V分量的取值范围是到255);
(2)在RGB空间下,R分量通常较小,一般在30以下,B分量通常较大,一般在80以上,G分量波动较大;
(3)在HSV空间下对图像进行补光和加饱和度处理,即将图像的S分量和V分量均置为255,再进行色彩空间转换,由HSV空间转换为RGB空间,发现R分量全部变为0,B分量全部变为255(此操作会引入较大的干扰,后续没有使用)。
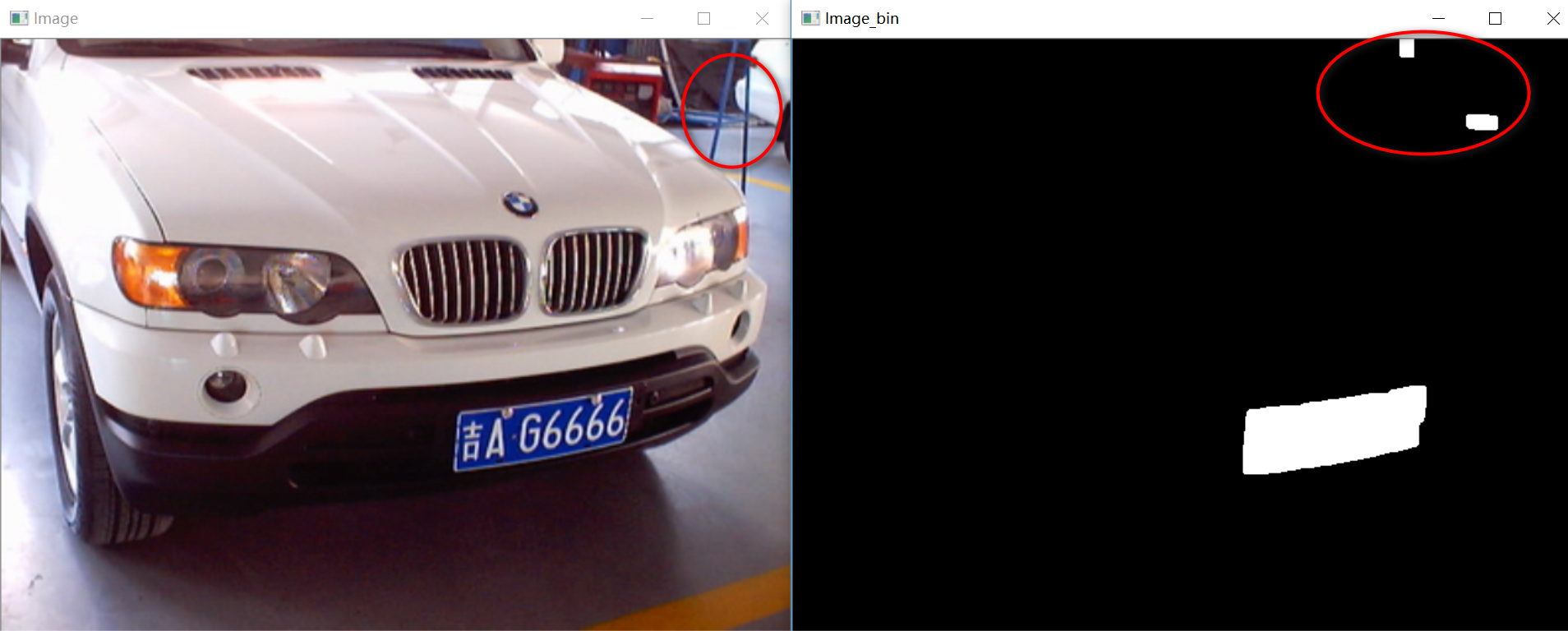
根据以上特征可初步筛选出可疑的车牌区域。随后对灰度图进行操作,将可疑位置的像素值置为255,其他位置的像素值置为0,即根据特征对图像进行了二值化。二值化图像中,可疑区域用白色表示,其他区域均为黑色。随后可通过膨胀腐蚀等操作对图像进一步处理。
for i in range(img_h):
for j in range(img_w):
# 普通蓝色车牌,同时排除透明反光物质的干扰
if ((img_HSV[:, :, 0][i, j]-115)**2 < 15**2) and (img_B[i, j] > 70) and (img_R[i, j] < 40):
img_gray[i, j] = 255
else:
img_gray[i, j] = 0
2.1.2 寻找车牌外围轮廓
选定可疑区域并将图像二值化后,一般情况下,图像中就只有车牌位置的像素颜色为白,但在一些特殊情况下还会存在一些噪声。如上图所示,由于图像右上角存在蓝色支架,与车牌颜色特征相符,因此也被当做车牌识别了出来,由此引入了噪声。
经过观察可以发现,车牌区域与噪声之间存在较大的差异,且车牌区域特征比较明显:
(1)根据我国常规车牌的形状可知,车牌的形状为扁平矩形,长宽比约为3:1;
(2)车牌区域面积远大于噪声区域,一般为图像中最大的白色区域。

可以通过cv2.findContours()函数寻找二值化后图像中白色区域的轮廓。
注意:在opencv2和opencv4中,cv2.findContours()的返回值有两个,而在opencv3中,返回值有3个。视opencv版本不同,代码的写法也会存在一定的差异。
# 检测所有外轮廓,只留矩形的四个顶点
# opencv4.0, opencv2.x
contours, _ = cv2.findContours(img_bin, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
# opencv3.x
_, contours, _ = cv2.findContours(img_bin, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
在本例中,因为二值化图像中共有三块白色区域(车牌及两处噪声),因此返回值contours为长度为3的list。list内装有3个array,每个array内各存放着一块白色区域的轮廓信息。每个array的shape均为(n, 1, 2),即每个array存放着对应白色区域轮廓上n个点的坐标。
目前得到了3个array,即3组轮廓信息,但我们并不清楚其中哪个是车牌区域对应的那一组轮廓信息。此时可以根据车牌的上述特征筛选出车牌区域的轮廓。
#形状及大小筛选校验
det_x_max = 0
det_y_max = 0
num = 0
for i in range(len(contours)):
x_min = np.min(contours[i][ :, :, 0])
x_max = np.max(contours[i][ :, :, 0])
y_min = np.min(contours[i][ :, :, 1])
y_max = np.max(contours[i][ :, :, 1])
det_x = x_max - x_min
det_y = y_max - y_min
if (det_x / det_y > 1.8) and (det_x > det_x_max ) and (det_y > det_y_max ):
det_y_max = det_y
det_x_max = det_x
num = i
# 获取最可疑区域轮廓点集
points = np.array(contours[num][:, 0])
最终得到的points的shape为(n, 2),即存放了n个点的坐标,这n个点均分布在车牌的边缘上。
2.1.3 车牌区域定位
获取车牌轮廓上的点集后,可用cv2.minAreaRect()获取点集的最小外接矩形。返回值rect内包含该矩形的中心点坐标、高度宽度及倾斜角度等信息,使用cv2.boxPoints()可获取该矩形的四个顶点坐标。
# 获取最小外接矩阵,中心点坐标,宽高,旋转角度
rect = cv2.minAreaRect(points)
# 获取矩形四个顶点,浮点型
box = cv2.boxPoints(rect)
# 取整
box = np.int0(box)
但我们并不清楚这四个坐标点各对应着矩形的哪一个顶点,因此无法充分地利用这些坐标信息。
可以从坐标值的大小特征入手,将四个坐标与矩形的四个顶点匹配起来:在opencv的坐标体系下,纵坐标最小的是top_point,纵坐标最大的是bottom_point, 横坐标最小的是left_point,横坐标最大的是right_point。
# 获取四个顶点坐标
left_point_x = np.min(box[:, 0])
right_point_x = np.max(box[:, 0])
top_point_y = np.min(box[:, 1])
bottom_point_y = np.max(box[:, 1]) left_point_y = box[:, 1][np.where(box[:, 0] == left_point_x)][0]
right_point_y = box[:, 1][np.where(box[:, 0] == right_point_x)][0]
top_point_x = box[:, 0][np.where(box[:, 1] == top_point_y)][0]
bottom_point_x = box[:, 0][np.where(box[:, 1] == bottom_point_y)][0]
# 上下左右四个点坐标
vertices = np.array([[top_point_x, top_point_y], [bottom_point_x, bottom_point_y], [left_point_x, left_point_y], [right_point_x, right_point_y]])


2.2 畸变校正
2.2.1 畸变后车牌顶点定位
要想实现车牌的畸变矫正,必须找到畸变前后对应点的位置关系。
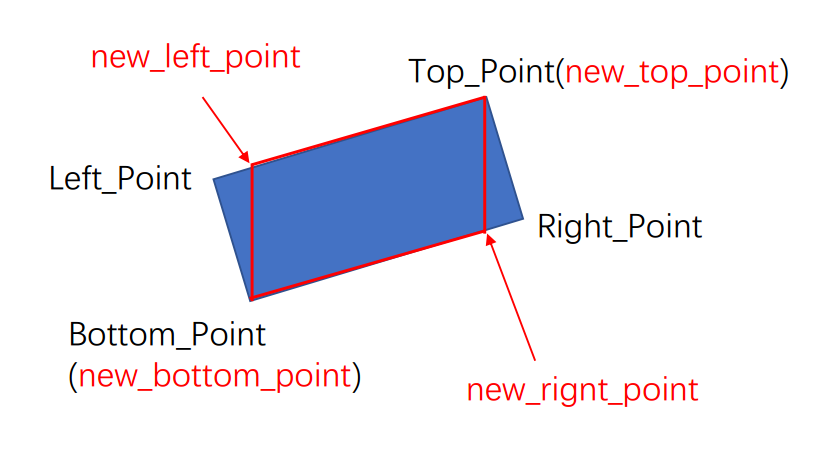
可以看出,本是矩形的车牌畸变后变成了平行四边形,因此车牌轮廓和得出来的矩形轮廓并不契合。但有了矩形的四个顶点坐标后,可以通过简单的几何相似关系求出平行四边形车牌的四个顶点坐标。
在本例中,平行四边形四个顶点与矩形四个顶点之间有如下关系:矩形顶点Top_Point、Bottom_Point与平行四边形顶点new_top_point、new_bottom_point重合,矩形顶点Top_Point的横坐标与平行四边形顶点new_right_point的横坐标相同,矩形顶点Bottom_Point的横坐标与平行四边形顶点new_left_point的横坐标相同。
但事实上,由于拍摄的角度不同,可能出现两种不同的畸变情况。可以根据矩形倾斜角度的不同来判断具体是哪种畸变情况。

判断出具体的畸变情况后,选用对应的几何相似关系,即可轻易地求出平行四边形四个顶点坐标,即得到了畸变后车牌四个顶点的坐标。
要想实现车牌的校正,还需得到畸变前车牌四个顶点的坐标。因为我国车牌的标准尺寸为440X140,因此可规定畸变前车牌的四个顶点坐标分别为:(0,0),(440,0),(0,140),(440,140)。顺序上需与畸变后的四个顶点坐标相对应。
# 畸变情况1
if rect[2] > -45:
new_right_point_x = vertices[0, 0]
new_right_point_y = int(vertices[1, 1] - (vertices[0, 0]- vertices[1, 0]) / (vertices[3, 0] - vertices[1, 0]) * (vertices[1, 1] - vertices[3, 1]))
new_left_point_x = vertices[1, 0]
new_left_point_y = int(vertices[0, 1] + (vertices[0, 0] - vertices[1, 0]) / (vertices[0, 0] - vertices[2, 0]) * (vertices[2, 1] - vertices[0, 1]))
# 校正后的四个顶点坐标
point_set_1 = np.float32([[440, 0],[0, 0],[0, 140],[440, 140]])
# 畸变情况2
elif rect[2] < -45:
new_right_point_x = vertices[1, 0]
new_right_point_y = int(vertices[0, 1] + (vertices[1, 0] - vertices[0, 0]) / (vertices[3, 0] - vertices[0, 0]) * (vertices[3, 1] - vertices[0, 1]))
new_left_point_x = vertices[0, 0]
new_left_point_y = int(vertices[1, 1] - (vertices[1, 0] - vertices[0, 0]) / (vertices[1, 0] - vertices[2, 0]) * (vertices[1, 1] - vertices[2, 1]))
# 校正后的四个顶点坐标
point_set_1 = np.float32([[0, 0],[0, 140],[440, 140],[440, 0]]) # 校正前平行四边形四个顶点坐标
new_box = np.array([(vertices[0, 0], vertices[0, 1]), (new_left_point_x, new_left_point_y), (vertices[1, 0], vertices[1, 1]), (new_right_point_x, new_right_point_y)])
point_set_0 = np.float32(new_box)
2.2.2 校正
该畸变是由于摄像头与车牌不垂直而引起的投影造成的,因此可用cv2.warpPerspective()来进行校正。
# 变换矩阵
mat = cv2.getPerspectiveTransform(point_set_0, point_set_1)
# 投影变换
lic = cv2.warpPerspective(img, mat, (440, 140))

2.3 源码分享
# Created by 秋沐霖 on 2019/3/19.
import cv2
import numpy as np # 预处理
def imgProcess(path):
img = cv2.imread(path)
# 统一规定大小
img = cv2.resize(img, (640,480))
# 高斯模糊
img_Gas = cv2.GaussianBlur(img,(5,5),0)
# RGB通道分离
img_B = cv2.split(img_Gas)[0]
img_G = cv2.split(img_Gas)[1]
img_R = cv2.split(img_Gas)[2]
# 读取灰度图和HSV空间图
img_gray = cv2.cvtColor(img_Gas, cv2.COLOR_BGR2GRAY)
img_HSV = cv2.cvtColor(img_Gas, cv2.COLOR_BGR2HSV)
return img, img_Gas, img_B, img_G, img_R, img_gray, img_HSV # 初步识别
def preIdentification(img_gray, img_HSV, img_B, img_R):
for i in range(480):
for j in range(640):
# 普通蓝色车牌,同时排除透明反光物质的干扰
if ((img_HSV[:, :, 0][i, j]-115)**2 < 15**2) and (img_B[i, j] > 70) and (img_R[i, j] < 40):
img_gray[i, j] = 255
else:
img_gray[i, j] = 0
# 定义核
kernel_small = np.ones((3, 3))
kernel_big = np.ones((7, 7)) img_gray = cv2.GaussianBlur(img_gray, (5, 5), 0) # 高斯平滑
img_di = cv2.dilate(img_gray, kernel_small, iterations=5) # 腐蚀5次
img_close = cv2.morphologyEx(img_di, cv2.MORPH_CLOSE, kernel_big) # 闭操作
img_close = cv2.GaussianBlur(img_close, (5, 5), 0) # 高斯平滑
_, img_bin = cv2.threshold(img_close, 100, 255, cv2.THRESH_BINARY) # 二值化
return img_bin # 定位
def fixPosition(img, img_bin):
# 检测所有外轮廓,只留矩形的四个顶点
contours, _ = cv2.findContours(img_bin, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
#形状及大小筛选校验
det_x_max = 0
det_y_max = 0
num = 0
for i in range(len(contours)):
x_min = np.min(contours[i][ :, :, 0])
x_max = np.max(contours[i][ :, :, 0])
y_min = np.min(contours[i][ :, :, 1])
y_max = np.max(contours[i][ :, :, 1])
det_x = x_max - x_min
det_y = y_max - y_min
if (det_x / det_y > 1.8) and (det_x > det_x_max ) and (det_y > det_y_max ):
det_y_max = det_y
det_x_max = det_x
num = i
# 获取最可疑区域轮廓点集
points = np.array(contours[num][:, 0])
return points #img_lic_canny = cv2.Canny(img_lic_bin, 100, 200) def findVertices(points):
# 获取最小外接矩阵,中心点坐标,宽高,旋转角度
rect = cv2.minAreaRect(points)
# 获取矩形四个顶点,浮点型
box = cv2.boxPoints(rect)
# 取整
box = np.int0(box)
# 获取四个顶点坐标
left_point_x = np.min(box[:, 0])
right_point_x = np.max(box[:, 0])
top_point_y = np.min(box[:, 1])
bottom_point_y = np.max(box[:, 1]) left_point_y = box[:, 1][np.where(box[:, 0] == left_point_x)][0]
right_point_y = box[:, 1][np.where(box[:, 0] == right_point_x)][0]
top_point_x = box[:, 0][np.where(box[:, 1] == top_point_y)][0]
bottom_point_x = box[:, 0][np.where(box[:, 1] == bottom_point_y)][0]
# 上下左右四个点坐标
vertices = np.array([[top_point_x, top_point_y], [bottom_point_x, bottom_point_y], [left_point_x, left_point_y], [right_point_x, right_point_y]])
return vertices, rect def tiltCorrection(vertices, rect):
# 畸变情况1
if rect[2] > -45:
new_right_point_x = vertices[0, 0]
new_right_point_y = int(vertices[1, 1] - (vertices[0, 0]- vertices[1, 0]) / (vertices[3, 0] - vertices[1, 0]) * (vertices[1, 1] - vertices[3, 1]))
new_left_point_x = vertices[1, 0]
new_left_point_y = int(vertices[0, 1] + (vertices[0, 0] - vertices[1, 0]) / (vertices[0, 0] - vertices[2, 0]) * (vertices[2, 1] - vertices[0, 1]))
# 校正后的四个顶点坐标
point_set_1 = np.float32([[440, 0],[0, 0],[0, 140],[440, 140]])
# 畸变情况2
elif rect[2] < -45:
new_right_point_x = vertices[1, 0]
new_right_point_y = int(vertices[0, 1] + (vertices[1, 0] - vertices[0, 0]) / (vertices[3, 0] - vertices[0, 0]) * (vertices[3, 1] - vertices[0, 1]))
new_left_point_x = vertices[0, 0]
new_left_point_y = int(vertices[1, 1] - (vertices[1, 0] - vertices[0, 0]) / (vertices[1, 0] - vertices[2, 0]) * (vertices[1, 1] - vertices[2, 1]))
# 校正后的四个顶点坐标
point_set_1 = np.float32([[0, 0],[0, 140],[440, 140],[440, 0]]) # 校正前平行四边形四个顶点坐标
new_box = np.array([(vertices[0, 0], vertices[0, 1]), (new_left_point_x, new_left_point_y), (vertices[1, 0], vertices[1, 1]), (new_right_point_x, new_right_point_y)])
point_set_0 = np.float32(new_box)
return point_set_0, point_set_1, new_box def transform(img, point_set_0, point_set_1):
# 变换矩阵
mat = cv2.getPerspectiveTransform(point_set_0, point_set_1)
# 投影变换
lic = cv2.warpPerspective(img, mat, (440, 140))
return lic def main():
path = 'F:\\Python\\license_plate\\test\\9.jpg'
# 图像预处理
img, img_Gas, img_B, img_G, img_R, img_gray, img_HSV = imgProcess(path)
# 初步识别
img_bin = preIdentification(img_gray, img_HSV, img_B, img_R)
points = fixPosition(img, img_bin)
vertices, rect = findVertices(points)
point_set_0, point_set_1, new_box = tiltCorrection(vertices, rect)
img_draw = cv2.drawContours(img.copy(), [new_box], -1, (0,0,255), 3)
lic = transform(img, point_set_0, point_set_1)
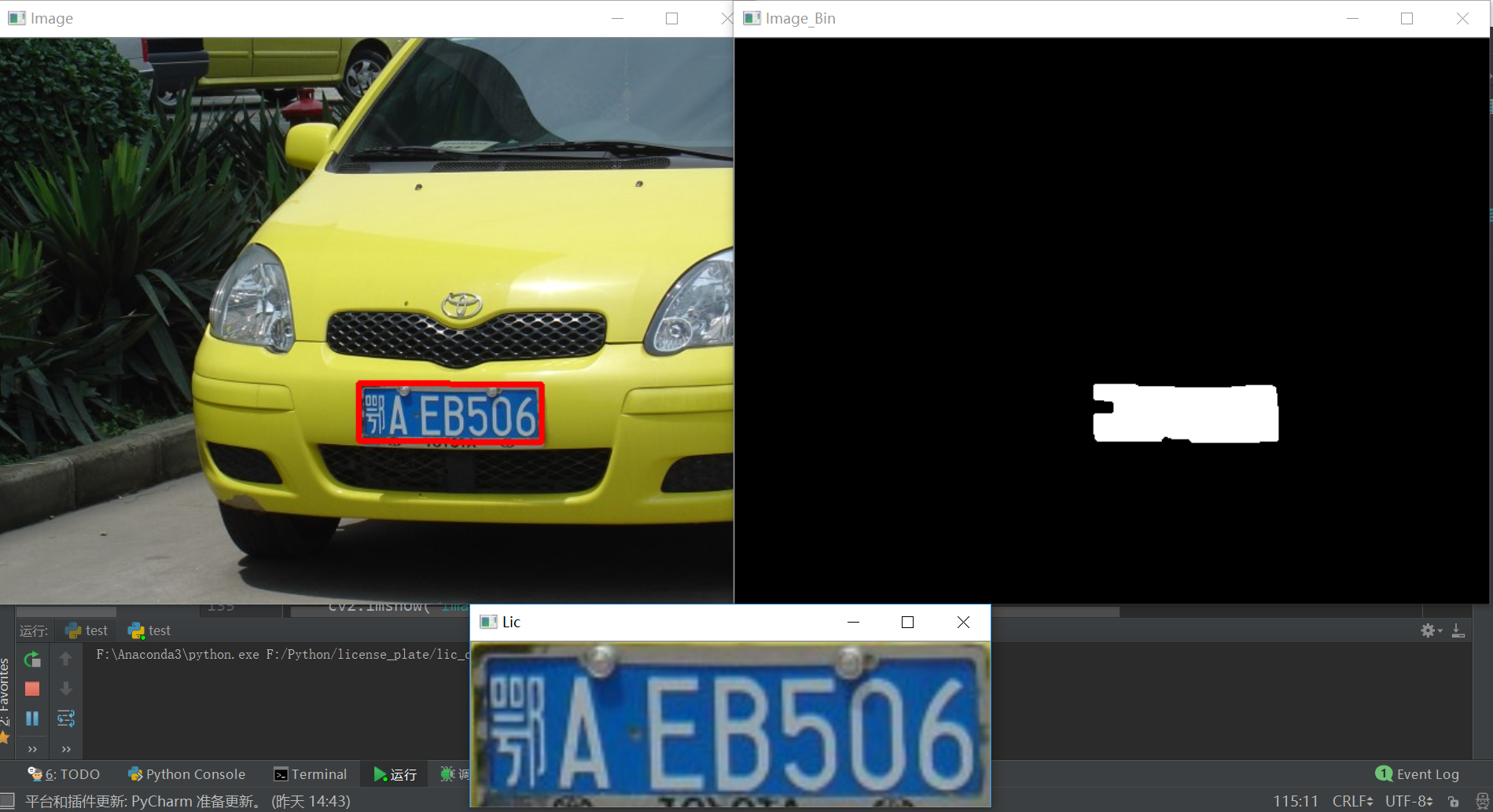
# 原图上框出车牌
cv2.namedWindow("Image")
cv2.imshow("Image", img_draw)
# 二值化图像
cv2.namedWindow("Image_Bin")
cv2.imshow("Image_Bin", img_bin)
# 显示校正后的车牌
cv2.namedWindow("Lic")
cv2.imshow("Lic", lic)
# 暂停、关闭窗口
cv2.waitKey(0)
cv2.destroyAllWindows() if __name__ == '__main__':
main()
三、后记
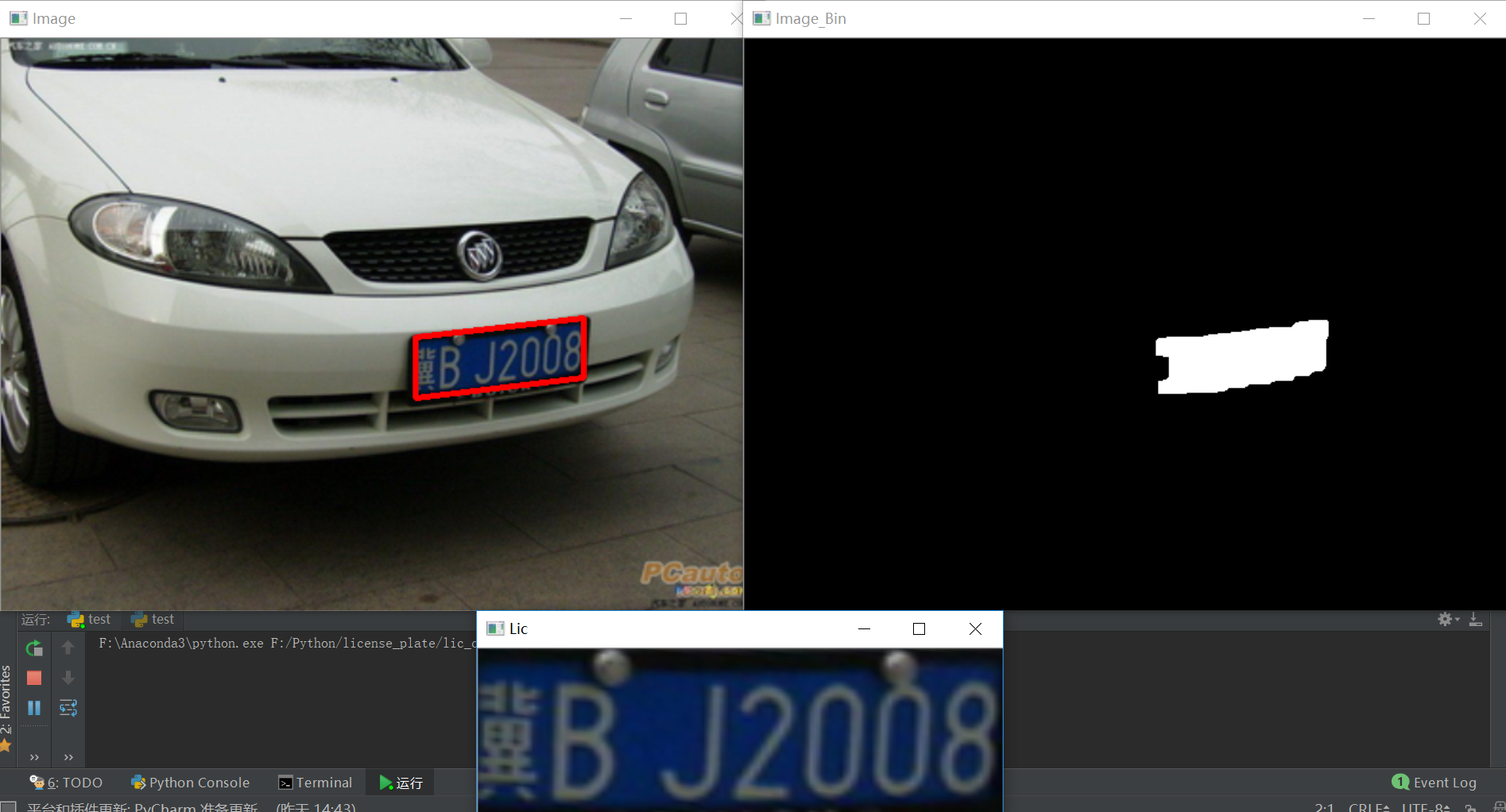
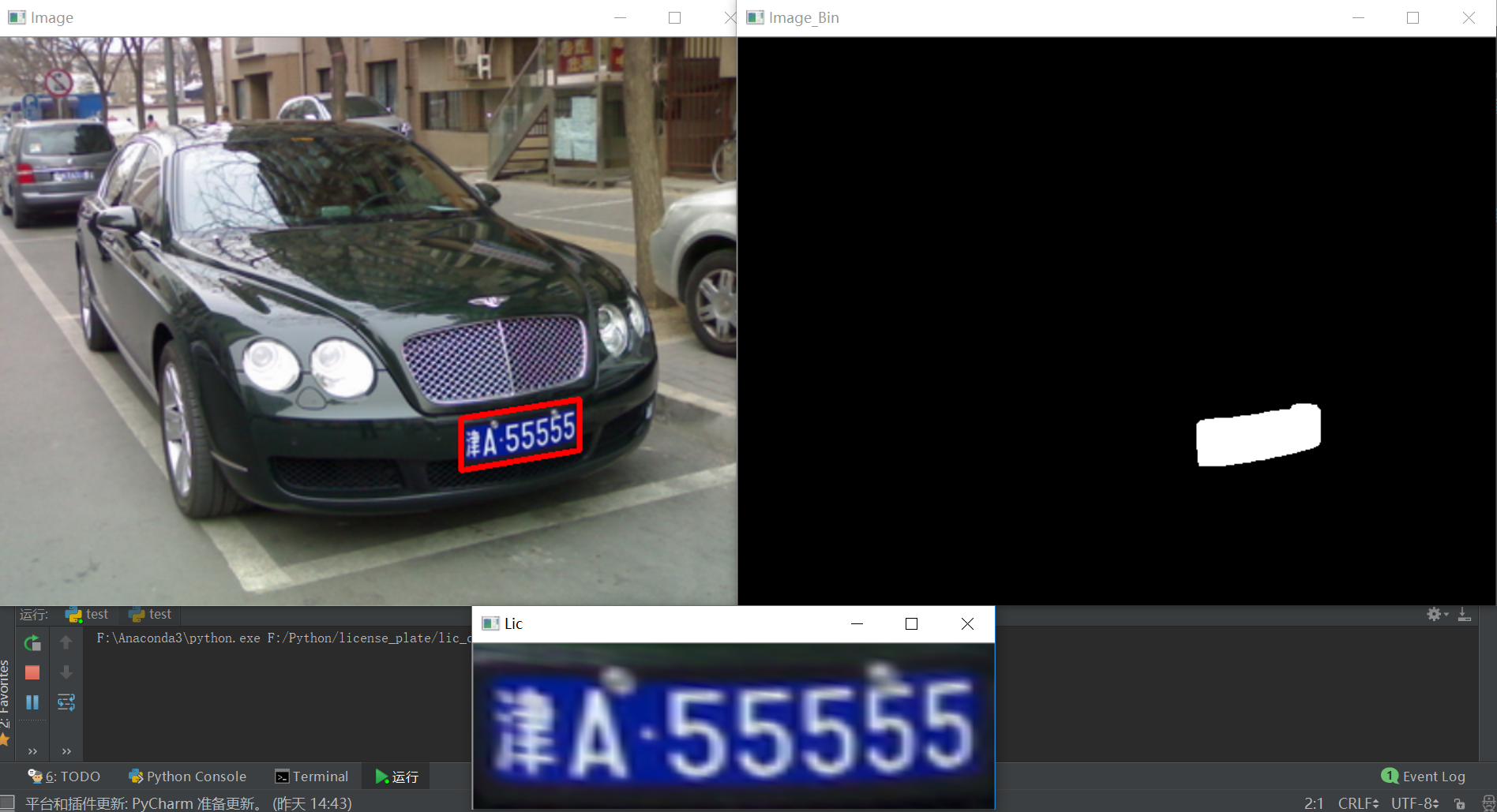
由于能力学识有限,代码只能识别最常见的蓝色车牌,对其他车牌无识别能力,后续会持续改进完善项目。最后附上几张实验图片:





车牌定位与畸变校正(python3.7,opencv4.0)的更多相关文章
- 基于matlab的蓝色车牌定位与识别---分割
接着上面的工作,接下去就该是进行字符分割了.考虑到为了后面的字符识别,因此在这部分需要实现的目标是需要把车牌的边框全部切除,对重新定位的车牌进行垂直方向水平方向调整,保证字符是正的.最后才是字符的分割 ...
- EasyPR--开发详解(2)车牌定位
这篇文章是一个系列中的第三篇.前两篇的地址贴下:介绍.详解1.我撰写这系列文章的目的是:1.普及车牌识别中相关的技术与知识点:2.帮助开发者了解EasyPR的实现细节:3.增进沟通. EasyPR的项 ...
- [翻译]利用顶点位移的VR畸变校正
文章英文原网址: http://www.gamasutra.com/blogs/BrianKehrer/20160125/264161/VR_Distortion_Correction_using_V ...
- 车牌识别LPR(四)-- 车牌定位
第四篇:车牌定位 车牌定位就是采用一系列图像处理或者数学的方法从一幅图像中将车牌准确地定位出来.车牌定位提取出的车牌是整个车牌识别系统的数据来源,它的效果的好坏直接影响到整个系统的表现,只有准确地定位 ...
- OpenCV使用边缘提取、腐蚀、轮廓进行车牌定位
http://blog.csdn.net/superdont/article/details/24935383 OpenCV使用边缘提取.腐蚀.轮廓进行车牌定位 2014-05-03 21:38 67 ...
- OpenCV畸变校正原理以及损失有效像素原理分析
上一篇博客简要介绍了一下常用的张正友标定法的流程,其中获取了摄像机的内参矩阵K,和畸变系数D. 1.在普通相机cv模型中,畸变系数主要有下面几个:(k1; k2; p1; p2[; k3[; k4; ...
- OpenCV畸变校正源代码分析
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包过普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法. 普通相机模型畸变校正函数针对OpenCV中的cv ...
- EasyPR源码剖析(4):车牌定位之Sobel算子定位
一.简介 sobel算子主要是用于获得数字图像的一阶梯度,常见的应用是边缘检测. Ⅰ.水平变化: 将 I 与一个奇数大小的内核进行卷积.比如,当内核大小为3时, 的计算结果为: Ⅱ.垂直变化: 将: ...
- EasyPR源码剖析(2):车牌定位
上一篇主要介绍了车牌识别的整体框架和流程,车牌识别主要划分为了两个过程:即车牌检测和字符识别,而车牌识别的核心环节就是这一节主要介绍的车牌定位,即 Plate Locate.车牌定位主要是将图片中有可 ...
随机推荐
- A million requests per second with Python
https://medium.freecodecamp.com/million-requests-per-second-with-Python-95c137af319 Is it possible t ...
- NSURLSession 所有的都在这里(一)
这篇文章会有什么? 在这篇文章中把NSURLSession.h文件集体梳理一遍,把里面的每个属性.代理和方法都拿出来说说,通过这篇文章我相信对于NSURLSession这一块的东西会梳理的比较全面一点 ...
- html 标签内联元素和块元素分类【转】
常见的块状元素与内联元素 块状元素 内联元素 address - 地址 blockquote - 块引用 center - 居中对齐 dir - 目录列表 div - 常用块级容易,也是CSS lay ...
- Nginx+uwsgi部署django
0. 登录远程服务器并准备 ssh 用户@IP -p 端口 回车后,要求输入服务器密码,再输入密码 更新软件源 sudo apt-get update sudo apt-get upgrade 1. ...
- Python之路,进程、线程、协程篇
本节内容 进程.与线程区别 cpu运行原理 python GIL全局解释器锁 线程 语法 join 线程锁之Lock\Rlock\信号量 将线程变为守护进程 Event事件 queue队列 生产者 ...
- 想做微信小程序第三方代理,各位觉得一键生成平台能赚到钱吗?
这几年生意不景气,这是很多人的共识.从2009年开始,各种专家就判断"明年经济是最差的一年."然后,这个明年,一直"明"到了2018年,到最后,我们发现,经济就 ...
- 解决jequry使用keydown无法跳转的问题
问题描述 代码 <script> $("document").ready(function() { $("#button").click(funct ...
- C# 发展史
C# 发展史 Intro 本文主要总结介绍C# 每个版本带来的不同的语言特性. C#,读作C Sharp,是微软推出的一种基于.NET平台的.面向对象的高级编程语言.是微软公司在2000年发布的一种新 ...
- eclipse 创建maven web示例
注意,以下所有需要建立在你的eclipse等已经集成配置好了maven了,没有的话需要安装maven. 一.创建项目 1.新建maven项目,如果不在上面,请到other里面去找一下 一直点击下一步, ...
- linux下redis数据库的简单使用
一.redis简介 Redis是一个key-value存储系统.和 Memcached类似,但是解决了断电后数据完全丢失的情况,而且她支持更多无化的value类型,除了和string外,还支持list ...