VideoPipe可视化视频结构化框架更新总结(2023-3-30)
项目地址:https://github.com/sherlockchou86/video_pipe_c
往期文章:https://www.cnblogs.com/xiaozhi_5638/p/16969546.html
最近有多个更新,有兴趣的扫码加群交流。
新增实例分割相关支持
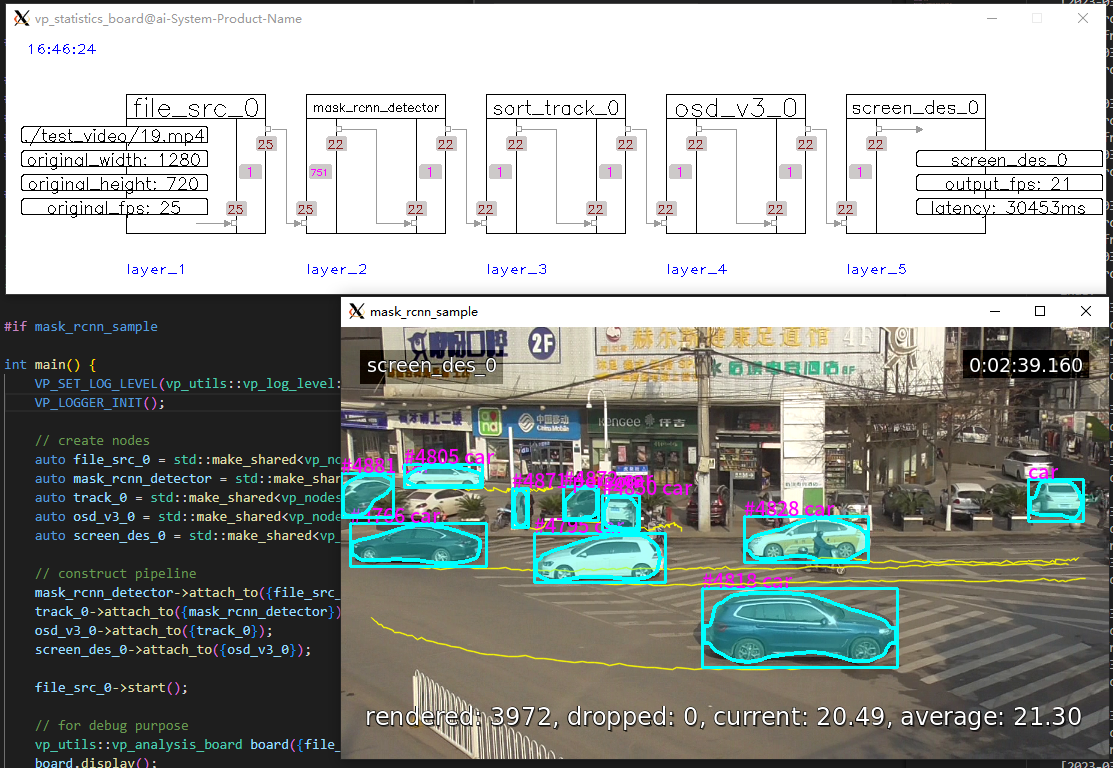
增加了基于mask-rcnn的实例分割插件和相关sample。
1 #include "VP.h"
2
3 #include "../nodes/vp_file_src_node.h"
4 #include "../nodes/infers/vp_mask_rcnn_detector_node.h"
5 #include "../nodes/track/vp_sort_track_node.h"
6 #include "../nodes/osd/vp_osd_node_v3.h"
7 #include "../nodes/vp_screen_des_node.h"
8
9 #include "../utils/analysis_board/vp_analysis_board.h"
10
11 /*
12 * ## mask rcnn sample ##
13 * image segmentation using mask rcnn.
14 */
15
16 #if mask_rcnn_sample
17
18 int main() {
19 VP_SET_LOG_LEVEL(vp_utils::vp_log_level::INFO);
20 VP_LOGGER_INIT();
21
22 // create nodes
23 auto file_src_0 = std::make_shared<vp_nodes::vp_file_src_node>("file_src_0", 0, "./test_video/19.mp4", 0.6);
24 auto mask_rcnn_detector = std::make_shared<vp_nodes::vp_mask_rcnn_detector_node>("mask_rcnn_detector", "./models/mask_rcnn/frozen_inference_graph.pb", "./models/mask_rcnn/mask_rcnn_inception_v2_coco_2018_01_28.pbtxt", "./models/coco_80classes.txt");
25 auto track_0 = std::make_shared<vp_nodes::vp_sort_track_node>("sort_track_0");
26 auto osd_v3_0 = std::make_shared<vp_nodes::vp_osd_node_v3>("osd_v3_0", "../third_party/paddle_ocr/font/NotoSansCJKsc-Medium.otf");
27 auto screen_des_0 = std::make_shared<vp_nodes::vp_screen_des_node>("screen_des_0", 0);
28
29 // construct pipeline
30 mask_rcnn_detector->attach_to({file_src_0});
31 track_0->attach_to({mask_rcnn_detector});
32 osd_v3_0->attach_to({track_0});
33 screen_des_0->attach_to({osd_v3_0});
34
35 file_src_0->start();
36
37 // for debug purpose
38 vp_utils::vp_analysis_board board({file_src_0});
39 board.display();
40 }
41
42
43 #endif
上面代码效果图如下:
新增语义分割相关支持
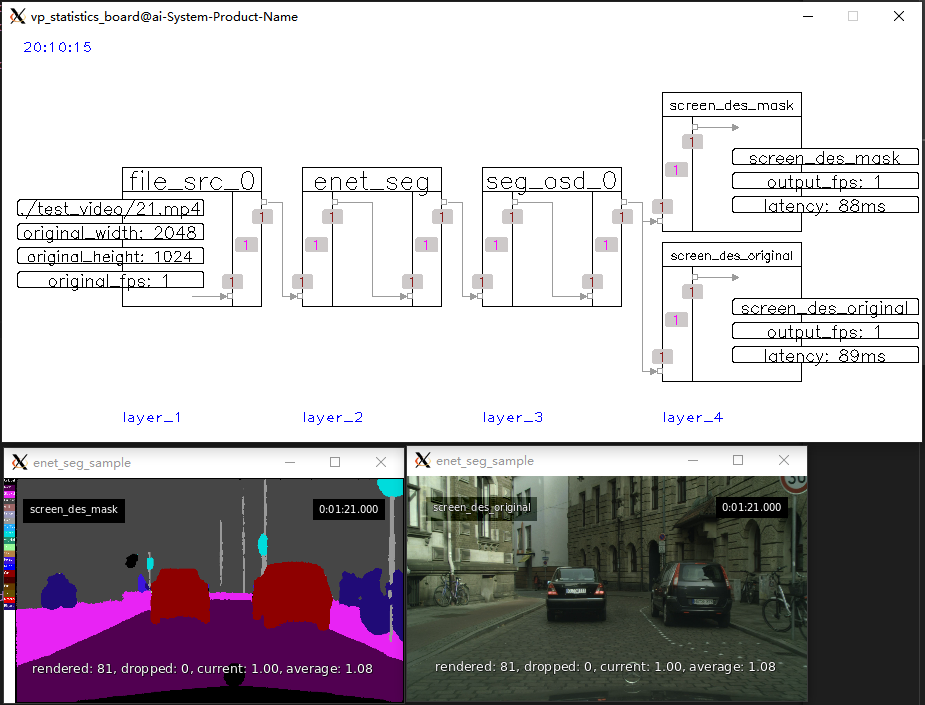
新增了基于ENet网络的语义分割插件和sample。
1 #include "VP.h"
2
3 #include "../nodes/vp_file_src_node.h"
4 #include "../nodes/infers/vp_enet_seg_node.h"
5 #include "../nodes/osd/vp_seg_osd_node.h"
6 #include "../nodes/vp_screen_des_node.h"
7
8 #include "../utils/analysis_board/vp_analysis_board.h"
9
10 /*
11 * ## enet seg sample ##
12 * semantic segmentation based on ENet.
13 * 1 input, 2 outputs including orignal frame and mask frame.
14 */
15
16 #if enet_seg_sample
17
18 int main() {
19 VP_SET_LOG_LEVEL(vp_utils::vp_log_level::INFO);
20 VP_LOGGER_INIT();
21
22 // create nodes
23 auto file_src_0 = std::make_shared<vp_nodes::vp_file_src_node>("file_src_0", 0, "./test_video/21.mp4");
24 auto enet_seg = std::make_shared<vp_nodes::vp_enet_seg_node>("enet_seg", "models/enet-cityscapes/enet-model.net");
25 auto seg_osd_0 = std::make_shared<vp_nodes::vp_seg_osd_node>("seg_osd_0", "models/enet-cityscapes/enet-classes.txt", "models/enet-cityscapes/enet-colors.txt");
26 auto screen_des_mask = std::make_shared<vp_nodes::vp_screen_des_node>("screen_des_mask", 0, true, vp_objects::vp_size(400, 225));
27 auto screen_des_original = std::make_shared<vp_nodes::vp_screen_des_node>("screen_des_original", 0, false, vp_objects::vp_size(400, 225));
28
29 // construct pipeline
30 enet_seg->attach_to({file_src_0});
31 seg_osd_0->attach_to({enet_seg});
32 screen_des_mask->attach_to({seg_osd_0});
33 screen_des_original->attach_to({seg_osd_0});
34
35 file_src_0->start();
36
37 // for debug purpose
38 vp_utils::vp_analysis_board board({file_src_0});
39 board.display();
40 }
41
42 #endif
上面代码效果图如下:
新增多级推理插件sample
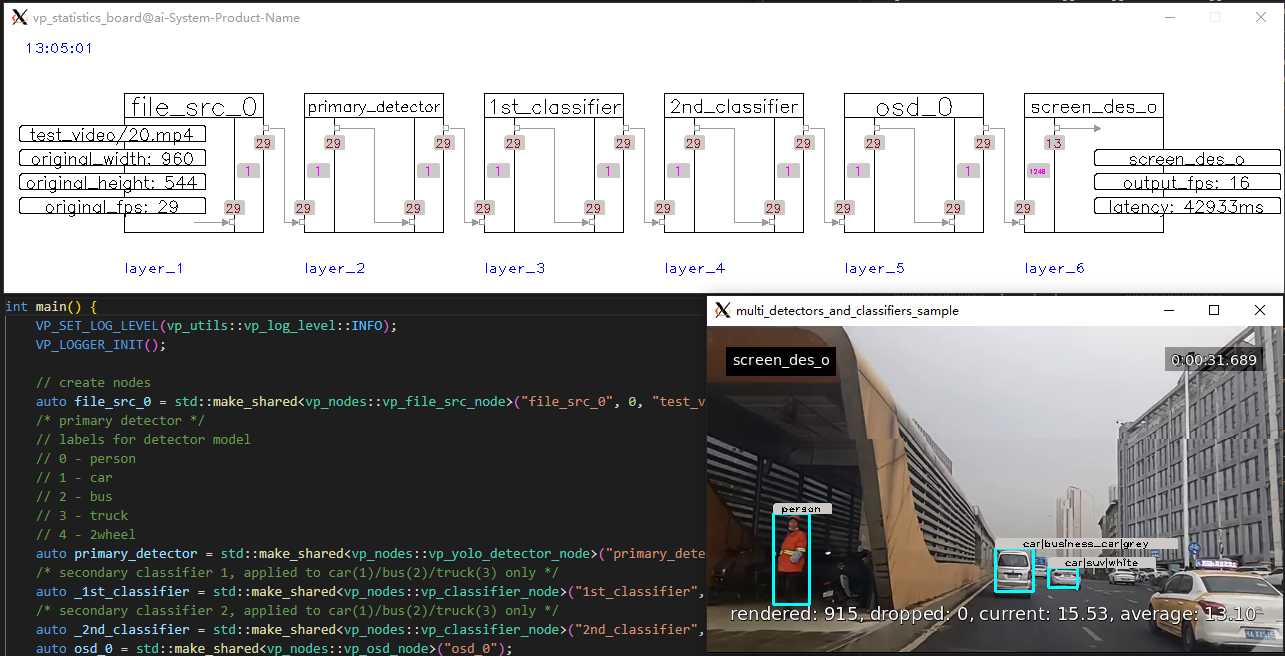
多个检测、分类插件串联,不同分类器作用于不同的主目标:
1 #include "VP.h"
2
3 #include "../nodes/vp_file_src_node.h"
4 #include "../nodes/infers/vp_yolo_detector_node.h"
5 #include "../nodes/infers/vp_classifier_node.h"
6 #include "../nodes/osd/vp_osd_node.h"
7 #include "../nodes/vp_screen_des_node.h"
8 #include "../utils/analysis_board/vp_analysis_board.h"
9
10 /*
11 * ## multi detectors and classifiers sample ##
12 * show multi infer nodes work together.
13 * 1 detector and 2 classifiers applied on primary class ids(1/2/3).
14 */
15
16 #if multi_detectors_and_classifiers_sample
17
18 int main() {
19 VP_SET_LOG_LEVEL(vp_utils::vp_log_level::INFO);
20 VP_LOGGER_INIT();
21
22 // create nodes
23 auto file_src_0 = std::make_shared<vp_nodes::vp_file_src_node>("file_src_0", 0, "test_video/20.mp4", 0.6);
24 /* primary detector */
25 // labels for detector model
26 // 0 - person
27 // 1 - car
28 // 2 - bus
29 // 3 - truck
30 // 4 - 2wheel
31 auto primary_detector = std::make_shared<vp_nodes::vp_yolo_detector_node>("primary_detector", "models/det_cls/yolov3-tiny-2022-0721_best.weights", "models/det_cls/yolov3-tiny-2022-0721.cfg", "models/det_cls/yolov3_tiny_5classes.txt", 416, 416, 1);
32 /* secondary classifier 1, applied to car(1)/bus(2)/truck(3) only */
33 auto _1st_classifier = std::make_shared<vp_nodes::vp_classifier_node>("1st_classifier", "models/det_cls/vehicle/resnet18-batch=N-type_view_0322_nhwc.onnx", "", "models/det_cls/vehicle/vehicle_types.txt", 224, 224, 1, std::vector<int>{1, 2, 3}, 10, false, 1, cv::Scalar(), cv::Scalar(), true, true);
34 /* secondary classifier 2, applied to car(1)/bus(2)/truck(3) only */
35 auto _2nd_classifier = std::make_shared<vp_nodes::vp_classifier_node>("2nd_classifier", "models/det_cls/vehicle/resnet18-batch=N-color_view_0322_nhwc.onnx", "", "models/det_cls/vehicle/vehicle_colors.txt", 224, 224, 1, std::vector<int>{1, 2, 3}, 10, false, 1, cv::Scalar(), cv::Scalar(), true, true);
36 auto osd_0 = std::make_shared<vp_nodes::vp_osd_node>("osd_0");
37 auto screen_des_0 = std::make_shared<vp_nodes::vp_screen_des_node>("screen_des_o", 0);
38
39 // construct pipeline
40 primary_detector->attach_to({file_src_0});
41 _1st_classifier->attach_to({primary_detector});
42 _2nd_classifier->attach_to({_1st_classifier});
43 osd_0->attach_to({_2nd_classifier});
44 screen_des_0->attach_to({osd_0});
45
46 // start
47 file_src_0->start();
48
49 // for debug purpose
50 vp_utils::vp_analysis_board board({file_src_0});
51 board.display();
52 }
53
54 #endif
上面代码运行效果如下:
新增图片源输入插件
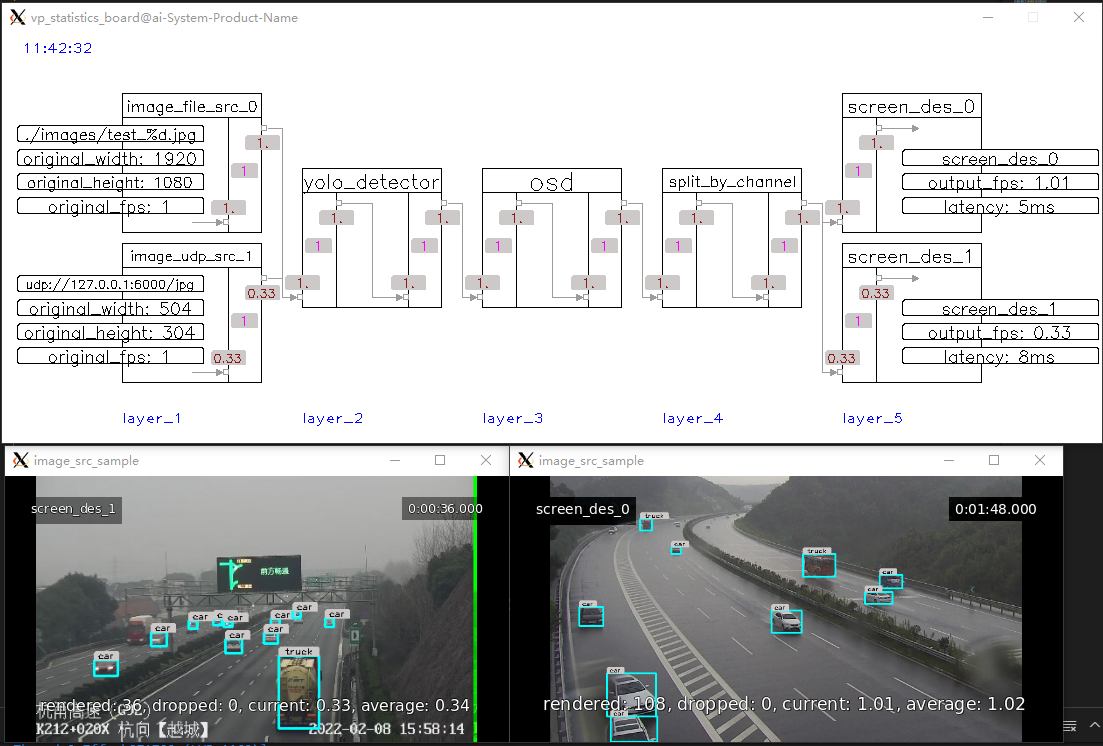
支持以图片方式输入(文件或UDP),频率可调、各个通道互相独立。
1 #include "VP.h"
2
3 #include "../nodes/vp_image_src_node.h"
4 #include "../nodes/infers/vp_yolo_detector_node.h"
5 #include "../nodes/osd/vp_osd_node.h"
6 #include "../nodes/vp_split_node.h"
7 #include "../nodes/vp_screen_des_node.h"
8
9 #include "../utils/analysis_board/vp_analysis_board.h"
10
11 /*
12 * ## image_src_sample ##
13 * show how vp_image_src_node works, read image from local file or receive image from remote via udp.
14 */
15
16 #if image_src_sample
17
18 int main() {
19 VP_SET_LOG_LEVEL(vp_utils::vp_log_level::INFO);
20 VP_LOGGER_INIT();
21
22 // create nodes
23 auto image_src_0 = std::make_shared<vp_nodes::vp_image_src_node>("image_file_src_0", 0, "./images/test_%d.jpg", 1, 0.4); // read 1 image EVERY 1 second from local files, such as test_0.jpg,test_1.jpg
24 /* sending command for test: `gst-launch-1.0 filesrc location=16.mp4 ! qtdemux ! avdec_h264 ! videoconvert ! videoscale ! video/x-raw,width=416,height=416 ! videorate ! video/x-raw,framerate=1/1 ! jpegenc ! rtpjpegpay ! udpsink host=ip port=6000` */
25 auto image_src_1 = std::make_shared<vp_nodes::vp_image_src_node>("image_udp_src_1", 1, "6000", 3); // receive 1 image EVERY 3 seconds from remote via udp , such as 127.0.0.1:6000
26 auto yolo_detector = std::make_shared<vp_nodes::vp_yolo_detector_node>("yolo_detector", "models/det_cls/yolov3-tiny-2022-0721_best.weights", "models/det_cls/yolov3-tiny-2022-0721.cfg", "models/det_cls/yolov3_tiny_5classes.txt");
27 auto osd = std::make_shared<vp_nodes::vp_osd_node>("osd");
28 auto split = std::make_shared<vp_nodes::vp_split_node>("split_by_channel", true); // split by channel index (important!)
29 auto screen_des_0 = std::make_shared<vp_nodes::vp_screen_des_node>("screen_des_0", 0);
30 auto screen_des_1 = std::make_shared<vp_nodes::vp_screen_des_node>("screen_des_1", 1);
31
32 // construct pipeline
33 yolo_detector->attach_to({image_src_0, image_src_1});
34 osd->attach_to({yolo_detector});
35 split->attach_to({osd});
36 screen_des_0->attach_to({split});
37 screen_des_1->attach_to({split});
38
39 image_src_0->start(); // start read from local file
40 image_src_1->start(); // start receive from remote via udp
41
42 // for debug purpose
43 vp_utils::vp_analysis_board board({image_src_0, image_src_1});
44 board.display();
45 }
46
47 #endif
上面代码运行效果如下:
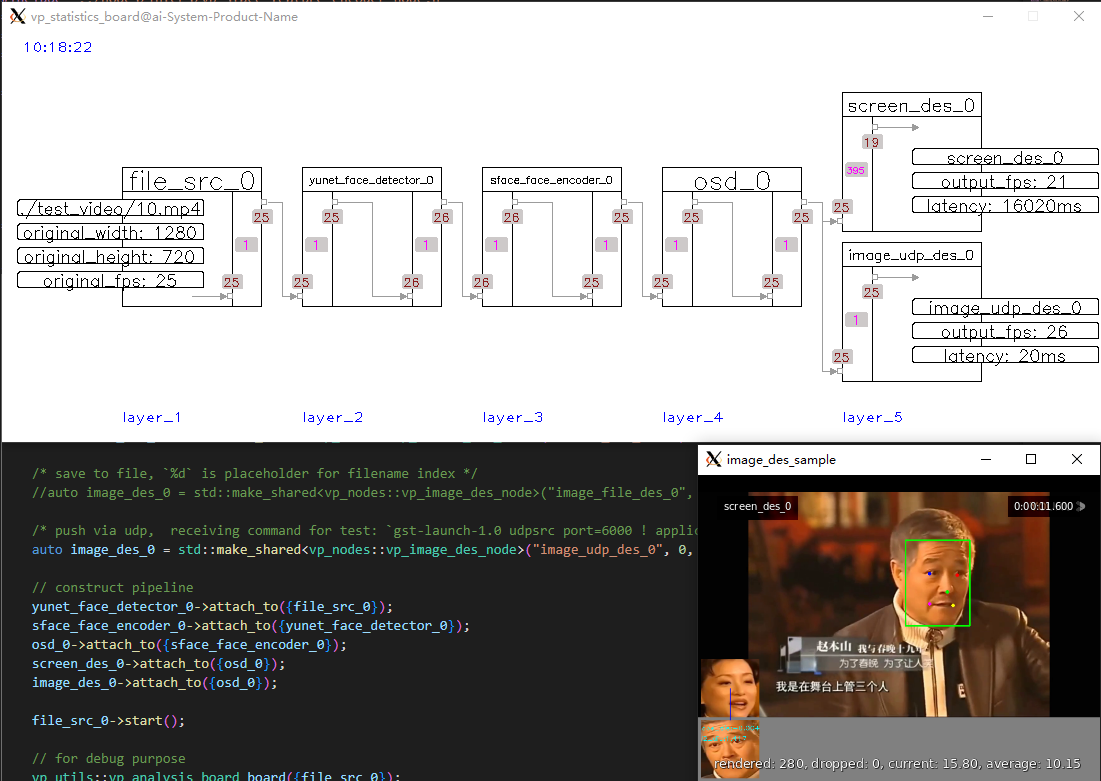
新增图片结果输出插件
支持以图片格式输出结果(文件或UDP),频率可调、各通道互相独立。
1 #include "VP.h"
2
3 #include "../nodes/vp_file_src_node.h"
4 #include "../nodes/infers/vp_yunet_face_detector_node.h"
5 #include "../nodes/infers/vp_sface_feature_encoder_node.h"
6 #include "../nodes/osd/vp_face_osd_node_v2.h"
7 #include "../nodes/vp_screen_des_node.h"
8 #include "../nodes/vp_image_des_node.h"
9
10 #include "../utils/analysis_board/vp_analysis_board.h"
11
12 /*
13 * ## image_des_sample ##
14 * show how vp_image_des_node works, save image to local file or push image to remote via udp.
15 */
16
17 #if image_des_sample
18
19 int main() {
20 VP_SET_LOG_LEVEL(vp_utils::vp_log_level::INFO);
21 VP_LOGGER_INIT();
22
23 // create nodes
24 auto file_src_0 = std::make_shared<vp_nodes::vp_file_src_node>("file_src_0", 0, "./test_video/10.mp4", 0.6);
25 auto yunet_face_detector_0 = std::make_shared<vp_nodes::vp_yunet_face_detector_node>("yunet_face_detector_0", "./models/face/face_detection_yunet_2022mar.onnx");
26 auto sface_face_encoder_0 = std::make_shared<vp_nodes::vp_sface_feature_encoder_node>("sface_face_encoder_0", "./models/face/face_recognition_sface_2021dec.onnx");
27 auto osd_0 = std::make_shared<vp_nodes::vp_face_osd_node_v2>("osd_0");
28 auto screen_des_0 = std::make_shared<vp_nodes::vp_screen_des_node>("screen_des_0", 0);
29
30 /* save to file, `%d` is placeholder for filename index */
31 //auto image_des_0 = std::make_shared<vp_nodes::vp_image_des_node>("image_file_des_0", 0, "./images/%d.jpg", 3);
32
33 /* push via udp, receiving command for test: `gst-launch-1.0 udpsrc port=6000 ! application/x-rtp,encoding-name=jpeg ! rtpjpegdepay ! jpegparse ! jpegdec ! queue ! videoconvert ! autovideosink` */
34 auto image_des_0 = std::make_shared<vp_nodes::vp_image_des_node>("image_udp_des_0", 0, "192.168.77.248:6000", 3, vp_objects::vp_size(400, 200));
35
36 // construct pipeline
37 yunet_face_detector_0->attach_to({file_src_0});
38 sface_face_encoder_0->attach_to({yunet_face_detector_0});
39 osd_0->attach_to({sface_face_encoder_0});
40 screen_des_0->attach_to({osd_0});
41 image_des_0->attach_to({osd_0});
42
43 file_src_0->start();
44
45 // for debug purpose
46 vp_utils::vp_analysis_board board({file_src_0});
47 board.display();
48 }
49
50 #endif
上面代码运行效果如下:
更多更新扫码加入微信群,及时获取通知。
VideoPipe可视化视频结构化框架更新总结(2023-3-30)的更多相关文章
- VideoPipe可视化视频结构化框架更新总结(2022-12-9)
项目地址:https://github.com/sherlockchou86/video_pipe_c 往期文章:https://www.cnblogs.com/xiaozhi_5638/p/1685 ...
- VideoPipe可视化视频结构化框架开源了!
完成多路视频并行接入.解码.多级推理.结构化数据分析.上报.编码推流等过程,插件式/pipe式编程风格,功能上类似英伟达的deepstream和华为的mxvision,但底层核心不依赖复杂难懂的gst ...
- VideoPipe可视化视频结构化框架新增功能详解(2022-11-4)
VideoPipe从国庆节上线源代码到现在经历过了一个月时间,期间吸引了若干小伙伴的参与,现将本阶段新增内容总结如下,有兴趣的朋友可以加微信拉群交流. 项目地址:https://github.com/ ...
- VP视频结构化框架
完成多路视频并行接入.解码.多级推理.结构化数据分析.上报.编码推流等过程,插件式/pipe式编程风格,功能上类似英伟达的deepstream和华为的mxvision,但底层核心不依赖复杂难懂的gst ...
- 视频结构化 AI 推理流程
「视频结构化」是一种 AI 落地的工程化实现,目的是把 AI 模型推理流程能够一般化.它输入视频,输出结构化数据,将结果给到业务系统去形成某些行业的解决方案. 换个角度,如果你想用摄像头来实现某些智能 ...
- [AI开发]基于DeepStream的视频结构化解决方案
视频结构化的定义 利用深度学习技术实时分析视频中有价值的内容,并输出结构化数据.相比数据库中每条结构化数据记录,视频.图片.音频等属于非结构化数据,计算机程序不能直接识别非结构化数据,因此需要先将这些 ...
- [AI开发]视频结构化类应用的局限性
算法不是通用的,基于深度学习的应用系统不但做不到通用,即使对于同一类业务场景,还需要为每个场景做定制.特殊处理,这样才能有可能到达实用标准.这种局限性在计算机视觉领域的应用中表现得尤其突出,本文介绍基 ...
- [AI开发]零代码分析视频结构化类应用结构设计
视频结构化类应用涉及到的技术栈比较多,而且每种技术入门门槛都较高,比如视频接入存储.编解码.深度学习推理.rtmp流媒体等等.每个环节的水都非常深,单独拿出来可以写好几篇文章,如果没有个几年经验基本很 ...
- Spark如何与深度学习框架协作,处理非结构化数据
随着大数据和AI业务的不断融合,大数据分析和处理过程中,通过深度学习技术对非结构化数据(如图片.音频.文本)进行大数据处理的业务场景越来越多.本文会介绍Spark如何与深度学习框架进行协同工作,在大数 ...
- seaborn线性关系数据可视化:时间线图|热图|结构化图表可视化
一.线性关系数据可视化lmplot( ) 表示对所统计的数据做散点图,并拟合一个一元线性回归关系. lmplot(x, y, data, hue=None, col=None, row=None, p ...
随机推荐
- python 时间戳转日期 不自动补零 without zero-padding
1. 时间戳转日期 代码 import time timestamp = 1568171336 time_format = "%Y-%m-%d %H:%M:%S" time_loc ...
- 记录jupyter lab 多个kernel混乱的问题
问题描述 在Anaconda下我有多个虚拟环境,其中一个叫d2l,由于pytorch版本和cuda算力不匹配,重新create了一个环境:d2l_new.然后环境配置好了之后激活环境,启动jupyte ...
- gpio 理解
NVIC :NVIC_Init(&NVIC_Initsture); 1.NVIC只是设置某一种中断的优先级,而不是打开某种中断. 2.ppp_ITConfig():才是开/关具体某种中断使能位 ...
- ABAP开发面向对象---类
今日学习ABAP面向对象里面的类,关于构造,继承,实现. 踩坑点:类有抽象的方法,类本身也需要是抽象的,故需要在类申明里面加上ABSTRACT关键字 学习资料为B站翱翔云天老师的 1 CLASS zc ...
- IndexError: invalid index of a 0-dim tensor. Use tensor.item() to convert a 0-dim tensor to a Python number
print('Epoch[{}/{}], loss:{:.6f}'.format(epoch+1,num_epoch,loss.data[0])) 将loss.data[0] 改为loss.item( ...
- spring为什么默认单例模式
单例bean的优势 由于不会每次都新创建新对象所以有一下几个性能上的优势. 1.减少了新生成实例的消耗 新生成实例消耗包括两方面,第一,spring会通过反射或者cglib来生成bean实例这都是耗性 ...
- MongoDB:内嵌文档查询匹配 查询集合中的文档
1.db.getCollection('Notification').find({ Title:{$regex:/班/}, "Message.TargetUrl":{$regex: ...
- NOIP2011普及组
T2 统计单词数 也是一道经典题 字符串匹配 #include<iostream> #include<cstdio> #include<map> #include ...
- 【随笔】Java处理异常输出对象Exception,转为String输出
声明:这段代码也是从网上摘抄的,当时忘记记录地址了,此为转载,勿怪 public static String handleException(Exception e) { StringBuffer m ...
- c++中的构造函数,拷贝构造函数和赋值函数
1.拷贝构造和赋值函数的区别: 1)拷贝构造函数是一个对象初始化一块内存区域,这块内存就是新对象的内存区,而赋值函数是对于一个已经被初始化的对象来进行赋值操作. 2)一般来说在数据成员包含指针对象的时 ...