poj 1265 Area(pick定理)
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 4373 | Accepted: 1983 |
Description
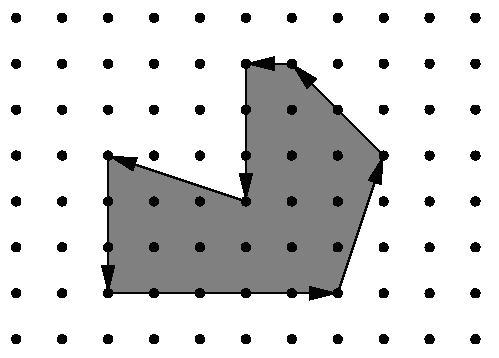
Figure 1: Example area.
You are hired to write a program that calculates the area occupied by the new facility from the movements of a robot along its walls. You can assume that this area is a polygon with corners on a rectangular grid. However, your boss insists that you use a formula he is so proud to have found somewhere. The formula relates the number I of grid points inside the polygon, the number E of grid points on the edges, and the total area A of the polygon. Unfortunately, you have lost the sheet on which he had written down that simple formula for you, so your first task is to find the formula yourself.
Input
For each scenario, you are given the number m, 3 <= m < 100, of movements of the robot in the first line. The following m lines contain pairs 揹x dy�of integers, separated by a single blank, satisfying .-100 <= dx, dy <= 100 and (dx, dy) != (0, 0). Such a pair means that the robot moves on to a grid point dx units to the right and dy units upwards on the grid (with respect to the current position). You can assume that the curve along which the robot moves is closed and that it does not intersect or even touch itself except for the start and end points. The robot moves anti-clockwise around the building, so the area to be calculated lies to the left of the curve. It is known in advance that the whole polygon would fit into a square on the grid with a side length of 100 units.
Output
Sample Input
2
4
1 0
0 1
-1 0
0 -1
7
5 0
1 3
-2 2
-1 0
0 -3
-3 1
0 -3
Sample Output
Scenario #1:
0 4 1.0 Scenario #2:
12 16 19.0 给一个n边形,求出其内部整点数I,边界上整点数E以及其面积s;
根据pick定理有s = I+E/2-1;所以先求出多边形面积和E,I就可以得出了;


#include<stdio.h>
#include<istream>
#include<algorithm>
#include<math.h>
using namespace std; const int N = ;
struct Point//定义点
{
double x,y;
Point() {}
Point (double a,double b):x(a),y(b) {}
} p[N]; double det(const Point &a,const Point &b)
{
return(a.x*b.y-a.y*b.x);
}//计算两个向量的叉积; int gcd(int a, int b)
{
return b == ?a:gcd(b,a%b);
} int main()
{
int test, item;
scanf("%d",&test);
for(item = ; item <= test; item++)
{
int n;
scanf("%d",&n);
int x,y,num = ;
p[].x = ;
p[].y= ;
for(int i = ; i <= n; i++)
{
scanf("%d %d",&x,&y); num += gcd(abs(x),abs(y));//多边形边界上整点数; p[i].x = p[i-].x + x;
p[i].y = p[i-].y + y;
} double sum=;
for(int i=; i<n; i++)
sum+=det(p[i],p[i+]); printf("Scenario #%d:\n",item);
printf("%d %d %.1lf\n",int(sum/2.0)+-(num/),num,sum/);
printf("\n");
}
}
poj 1265 Area(pick定理)的更多相关文章
- poj 1265 Area (Pick定理+求面积)
链接:http://poj.org/problem?id=1265 Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: ...
- POJ 1265 Area (Pick定理 & 多边形面积)
题目链接:POJ 1265 Problem Description Being well known for its highly innovative products, Merck would d ...
- [poj 1265]Area[Pick定理][三角剖分]
题意: 给出机器人移动的向量, 计算包围区域的内部整点, 边上整点, 面积. 思路: 面积是用三角剖分, 边上整点与GCD有关, 内部整点套用Pick定理. S = I + E / 2 - 1 I 为 ...
- poj 1265 Area( pick 定理 )
题目:http://poj.org/problem?id=1265 题意:已知机器人行走步数及每一步的坐标 变化量 ,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:1.以 ...
- Area - POJ 1265(pick定理求格点数+求多边形面积)
题目大意:以原点为起点然后每次增加一个x,y的值,求出来最后在多边形边上的点有多少个,内部的点有多少个,多边形的面积是多少. 分析: 1.以格子点为顶点的线段,覆盖的点的个数为GCD(dx,dy),其 ...
- poj 1265 Area 面积+多边形内点数
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5861 Accepted: 2612 Description ...
- POJ 1265 Area POJ 2954 Triangle Pick定理
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5227 Accepted: 2342 Description ...
- poj 1265 Area(Pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5666 Accepted: 2533 Description ...
- POJ 1265 Area (pick定理)
题目大意:已知机器人行走步数及每一步的坐标变化量,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:叉积求面积,pick定理求点. pick定理:面积=内部点数+边上点数/2-1 ...
随机推荐
- [转] 让ctags支持Javascript
mac下安装exuberant ctags mac 下自带ctags但是功能有限,要使用一些常用的功能需要安装exuberant ctags 下载exuberant ctags 安装exuberant ...
- Java基础知识强化之集合框架笔记14:List集合存储字符串并遍历
1. List集合存储学生对象并遍历: 需求:存储字符串并遍历 分析: (1)创建集合对象 (2)创建字符串对象 (3)添加字符串对象到集合中 (4)遍历集合 2. 代码示例: package cn. ...
- C# 内存管理优化畅想(二)---- 巧用堆栈
这个优化方法比较易懂,就是对于仅在方法内部用到的对象,不再分配在堆上,而是直接在栈上分配,方法结束后立即回收,这将大大减轻GC的压力. 其实,这个优化方法就是java里的逃逸分析,不知为何.net里没 ...
- CSS样式权值
内联样式表(InLine style)>内部样式表(Internal style sheet)>外部样式表(External style sheet) 例外:但如果外部样式表放在内部样式表 ...
- hadoop之wordCount程序理解
有篇文章http://www.cnblogs.com/xia520pi/archive/2012/05/16/2504205.html中介绍的
- document.documentElement.style判断浏览器是否支持Css3属性
1.document.documentElement.style 属性定义了当前浏览器支持的所有Css属性 包括带前缀的和不带前缀的 例如:animation,webkitAnimation,msAn ...
- JAVA HashMap详细介绍和示例
http://www.jb51.net/article/42769.htm 我们先对HashMap有个整体认识,然后再学习它的源码,最后再通过实例来学会使用HashMap. 第1部分 HashMa ...
- java中json转xml
参考:http://heipark.iteye.com/blog/1394844 需要json-lib-2.1-jdk15.jar和xom-1.2.5.jar,maven pom.xml如下: xml ...
- bash: ./configure: 权限不够 怎么办?
configure没有执行权限 通过chmod给其加上x权限 chmod +x configure 再在该用户下执行 ./configure
- bootstrap 下的 validation插件
http://reactiveraven.github.io/jqBootstrapValidation/