玩转X-CTR100 | X-Assistant串口助手控制功能

更多塔克创新资讯欢迎登陆【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
X-CTR100控制器配套的X-Assistant串口调试助手的控制功能,实现与X-CTR100控制器的交互控制,控制LED灯的亮灭和舵机旋转角度。通过本教程可以学习上位机控制逻辑和串口通信协议相关知识。
原理介绍
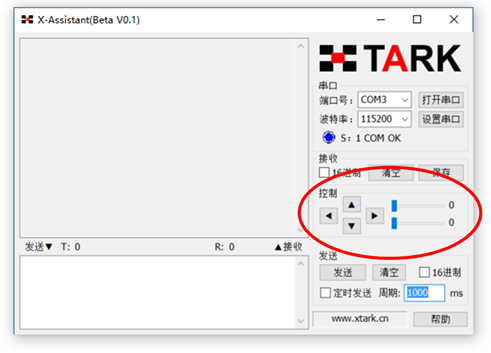
X-CTR100控制器配套X-Assistant串口调试助手软件。为方便PC与X-CTR100交互,增加控制功能,实现上下左右四个方向键和两个滑块交互,软件界面如下图所示。
控制协议如下所示,基于帧编码方式实现,具有帧头、帧校验内容。软件帮助也具有协议内容介绍。
- 协议内容:0xAA + 0x55 + 帧长度 + 帧编码 + 按键 + 滑块1 + 滑块2 + 校验和
- 帧长度:固定值 0x08
- 帧编码:固定值0x11
- 按键:无按键 - 0x00,上 - 0x01,下 - 0x02,左 - 0x04,右 - 0x08
- 滑块1:数值范围0~0xFF
- 滑块2:数值范围0~0xFF
- 校验和:前面7位数据累加和的低8位
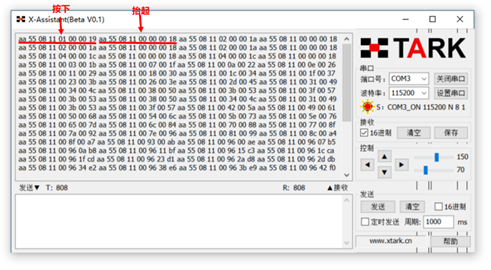
根据上述帧协议说明,列举帧范例:上按键 - 按下,滑块1 - 80,滑块2 - 80,帧数据"AA 55 11 01 50 50 B9"。帧协议可以通过将X-CTR100控制器的串口收发连接在一起进行测试,测试步骤如下。
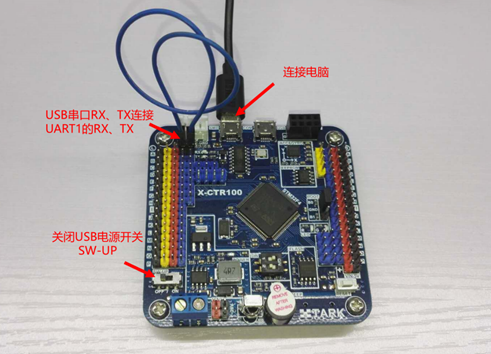
步骤一:将SW-UP调节到OFF侧,X-CTR100处理器无供电。通过杜邦线连接LA(UART1)接口的TX和RX。连接COM到调试电脑,此时CH340G USB转串口芯片通过电脑USB供电。
步骤二:打开X-Assistant软件,并打开对应串口,并设置接收显示为"16进制"。
步骤三:按下、抬起按钮观察数据变化,按下和抬起对应两个动作。滑动滑块观察帧数据,滑块滑动即可产生连续帧数据,实现实时的滑块位置反应。
X-Assistant的按钮控制可实现类似智能小车前进,后退,左转,右转控制,按钮按下执行相应的动作,按钮抬起小车停止。滑块控制可实现类似舵机控制,滑块滑动到什么位置,舵机指向什么位置,后面会说明通过滑块控制舵机示例。X-Assistant控制功能虽然简单,可以实现基本的机器人和智能小车控制,作品进行功能调试阶段比较方便。
例程设计
本例程实现X-Assistant软件控制功能对X-CTR100进行控制。上下按钮控制红绿LED灯,"上"按钮控制绿灯,"下"按钮控制红灯,按钮按下灯点亮,按钮抬起灯熄灭。滑块控制2个舵机转动。
硬件说明
本例程需要如下硬件资源:
- 串口UART1
- 红绿LED灯
- 扩展接口RA、RB
- 小功率舵机,如SG90
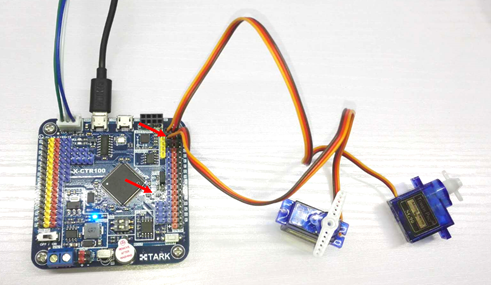
两个舵机分别连接在RA、RB两个接口上,使用TIM1的通道1和通道2进行舵机控制,注意舵机接插件正反,参考下图所示。
软件说明
本例程软件通过串口接收中断实现数据接收,并在中断中完成协议帧解析。中断程序通过flag标志向主程序传递解析结果,并打印接收到的帧数据。主程序根据解析结果,进行相应控制。
串口中断函数代码如下所示。
|
中断服务程序 void USART1_IRQHandler(void) { u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾) {
Res =USART_ReceiveData(USART1);
if(USART1_RX_CON < 3) //接收帧头 + 长度 { if(USART1_RX_CON == 0) { if(Res == 0xAA) { USART1_RX_CON = 1; } else {
} }else if(USART1_RX_CON == 1) { if(Res == 0x55) { USART1_RX_CON = 2; } else { USART1_RX_CON = 0; } } else { USART1_RX_LEN = ( Res-1 ); USART1_RX_CON = 3; USART1_RX_CHECKSUM = 0xFF + Res; //0xFF 为 AA 55 校验和 } } else //接收数据 { if(USART1_RX_CON < USART1_RX_LEN) { USART1_RX_BUF[USART1_RX_CON] = Res; USART1_RX_CON++; USART1_RX_CHECKSUM = USART1_RX_CHECKSUM + Res; } 位 { if( Res == USART1_RX_CHECKSUM ) //校验正确 { //标记接收完成 flag = 1;
printf("RX:AA 55 08 %x %x %x %x \r\n", USART1_RX_BUF[3], USART1_RX_BUF[4], USART1_RX_BUF[5], USART1_RX_BUF[6]); } else //数据错误 { printf("AERR\r\n"); }
//接收完成,恢复初始状态 USART1_RX_CON = 0; USART1_RX_LEN = 0; } } USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); } } |
主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-Assistant 控制功能例程***\r\n\r\n");
//舵机AB接口初始化 AX_SERVO_TIM2_AB_Init(); 度 度
//设置UART1接收中断 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 NVIC_Config();
while (1) { if(flag) { //上按键控制绿灯,按下亮,抬起灭 if(USART1_RX_BUF[4] & 0x01) AX_LEDG_On(); else AX_LEDG_Off();
//下按键控制红灯,按下亮,抬起灭 if(USART1_RX_BUF[4] & 0x02) AX_LEDR_On(); else AX_LEDR_Off();
控制舵机,不连接舵机对程序无影响 AX_SERVO_TIM2_A_SetAngle(200 + USART1_RX_BUF[5]*5); //舵机A控制
控制舵机,不连接舵机对程序无影响 AX_SERVO_TIM2_B_SetAngle(200 + USART1_RX_BUF[6]*5); //舵机B控制
flag = 0; }
AX_Delayms(10); } } |
本例程应用X-API函数,关于X-API函数的说明,请参考《X-CTR100开发指南》。
实现效果
上下按钮实现LED灯控制,拖动滑块进行舵机控制。解析的控制帧如下图所示。

玩转X-CTR100 | X-Assistant串口助手控制功能的更多相关文章
- 玩转X-CTR100 | STM32F4 l X-Assistant串口助手控制功能
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] X-CTR100控制器配套的X-Assis ...
- 谢欣伦 - OpenDev原创例程 - 串口助手Comm Assist
前一段时间,一位博友发邮件给我.他跟我讲说没太看懂<化繁为简系列原创教程 - 通信专题 - 串口类CxComm的使用>,请我做一个DEMO工程给他.我抽了一天时间编写并上传了一个DEMO工 ...
- python3 Serial 串口助手的接收读取数据
其实网上已经有许多python语言书写的串口,但大部分都是python2写的,没有找到一个合适的python编写的串口助手,只能自己来写一个串口助手,由于我只需要串口能够接收读取数据就可以了,故而这个 ...
- 34.QT-制作串口助手(并动态检测在线串口,附带源码)
qextserialport-1.2rc库下载链接: http://www.pudn.com/Download/item/id/2298532.html 1.添加源码到工程 将qextserialpo ...
- Qt小项目之串口助手控制LED
Qt小项目之串口助手控制LED 前言 最近刚学了一点Qt开发上位机,尝试着做个小软件练练手.查找了很多资料,做了一个简单的串口助手,可以实现串口基本发送和接收功能,支持中文显示,还可以控制STM32开 ...
- 用 PYQT5 和 QT Dseingner 写的串口助手
最近公司做项目需要写串口助手,于是从网上找教程着手写了一下,基本的功能可以实现了,但是想要一个表盘的功能一直没有找到教程,有些遗憾.大神们会的话给指导指导 谢谢啦 ! 下边有源码的连接,欢迎大家下载 ...
- python串口助手
最近项目中要使用模拟数据源通过向外发送数据,以前都是用C#编写,最近在研究python,所以就用python写了一个串口助手,方便以后的测试. 在电脑上通过虚拟串口助手产生两个虚拟串口,运行编写的串口 ...
- 通过编写串口助手工具学习MFC过程--(十一)弹出模态型对话框
通过编写串口助手工具学习MFC过程 因为以前也做过几次MFC的编程,每次都是项目完成时,MFC基本操作清楚了,但是过好长时间不再接触MFC的项目,再次做MFC的项目时,又要从头开始熟悉.这次通过做一个 ...
- 通过编写串口助手工具学习MFC过程——(十)UpdateData()用法和编辑框的赋值、取值
通过编写串口助手工具学习MFC过程 因为以前也做过几次MFC的编程,每次都是项目完成时,MFC基本操作清楚了,但是过好长时间不再接触MFC的项目,再次做MFC的项目时,又要从头开始熟悉.这次通过做一个 ...
随机推荐
- 如何在一台主机上管理自己的多个git repository
在使用git时,通常是直接ssh-keygen生成默认秘钥.然后将共钥添加到远程仓库,就可以访问了. 但是,当我们有多个repository时,这种方式就不适用了,因为一个秘钥只能关联一个远程仓库. ...
- UVa 1025 城市里的间谍
https://vjudge.net/problem/UVA-1025 题意:一个间谍要从第一个车站到第n个车站去会见另一个,在是期间有n个车站,有来回的车站,让你在时间T内时到达n,并且等车时间最短 ...
- 如何新建一个datatable,并往表里赋值
顺序是新建对象-->新建列-->新建行,示例代码如下: DataTable dt=new DataTable(); //新建对象 dt.Columns.Add("姓名" ...
- Qt_Android_书
1. http://bbs.csdn.net/topics/390942701 <<Qt on Android 核心编程>> Qt Quick核心编程 2.
- 《剑指offer》第二十六题(树的子结构)
// 面试题26:树的子结构 // 题目:输入两棵二叉树A和B,判断B是不是A的子结构. #include <iostream> struct BinaryTreeNode { doubl ...
- JavaScript权威指南--脚本化CSS
知识要点 客户端javascript程序员对CSS感兴趣的是因为样式可以通过脚本编程.脚本化css启用了一系列有趣的视觉效果.例如:可以创建动画让文档从右侧“滑入”.创造这些效果的javascript ...
- CentOS Gnome字体不清晰
需要安装字体:dejavu-sans-mono-fonts The package you need to install is dejavu-sans-mono-fonts. This is the ...
- Object.defineProperty方法 使用
Object.defineProperty() 方法会直接在一个对象上定义一个新属性,或者修改一个对象的现有属性, 并返回这个对象. 语法: Object.defineProperty(obj, pr ...
- 通过修改manifest文件来解决Vista/Win7/Win8/win10下应用程序兼容性问题
https://www.cnblogs.com/snowbook/p/5363990.html
- Style样式的四种使用(包括用C#代码动态加载资源文件并设置样式)
Posted on 2012-03-23 11:21 祥叔 阅读(2886) 评论(6) 编辑 收藏 在Web开发中,我们通过CSS来控制页面元素的样式,一般常用三种方式: 1. 内联样式 ...