A*搜索详解(2)——再战觐天宝匣
书接上文。在坦克寻径的,tank_way中,A*算法每一步搜索都是选择F值最小的节点,步步为营,使得寻径的结果是最优解。在这个过程中,查找最小F值的算法复杂度是O(n),这对于小地图没什么问题,但是对于大地图来说,openlist将会保存大量的节点信息,此时如果每次循环仍然使用O(n)复杂度的算法去查找最小F值就是个非常严重的问题了,这将导致游戏运行缓慢。可以针对这一点行改进,在常数时间内查找到最小F值的节点。
一个现成的数据结构是优先队列,python的heapq模块已经实现了这个功能,它是基于堆优先队列,可以中O(1)时间内返回堆中的最小值。我们用heapq存储openlist中的节点,构建新的坦克寻径代码:
import heapq START, END = (), () # 起点和终点的位置
OBSTRUCTION = 1 # 障碍物标记 class Node:
def __init__(self, x, y, parent):
self.x = x # 节点的行号
self.y = y # 节点的列号
self.parent = parent # 父节点
self.h = 0
self.g = 0
self.f = 0 def get_G(self):
''' 当前节点到起点的代价 '''
if self.g != 0:
return self.g
elif self.parent is None:
self.g = 0
# 当前节点在parent的垂直或水平方向
elif self.parent.x == self.x or self.parent.y == self.y:
self.g = self.parent.get_G() + 10
# 当前节点在parent的斜对角
else:
self.g = self.parent.get_G() + 14
return self.g def get_H(self):
'''节点到终点的距离估值 '''
if self.h == 0:
self.h = self.manhattan(self.x, self.y, END[0], END[1]) * 10
return self.h def get_F(self):
''' 节点的评估值 '''
if self.f == 0:
self.f = self.get_G() + self.get_H()
return self.f def manhattan(self, from_x, from_y, to_x, to_y):
''' 曼哈顿距离 '''
return abs(to_x - from_x) + abs(to_y - from_y) def __lt__(self, other):
''' 用于堆比较,返回堆中f最小的一个 '''
return self.get_F() < other.get_F() def __eq__(self, other):
''' 判断Node是否相等 '''
return self.x == other.x and self.y == other.y def __ne__(self, other):
''' 判断Node是否不等 '''
return not self.__eq__(other) class Tank_way:
''' 使用A*搜索找到坦克的最短移动路径 '''
def __init__(self, map2d):
self.map2d = map2d # 地图数据
self.x_edge, self.y_edge = len(map2d), len(map2d[0]) # 地图边界
# 垂直和水平方向的差向量
self.v_hv = [(-1, 0), (0, 1), (1, 0), (0, -1)]
# 斜对角的差向量
self.v_diagonal = [(-1, 1), (1, 1), (1, -1), (-1, -1)]
self.openlist = [] # openlist使用基于堆的优先队列
self.closelist = set()
self.answer = None def is_in_map(self, x, y):
''' (x, y)是否中地图内 '''
return 0 <= x < self.x_edge and 0 <= y < self.y_edge def in_closelist(self, x, y):
''' (x, y) 方格是否在closeList中 '''
return (x, y) in self.closelist def add_in_openlist(self, node):
''' 将node添加到 openlist '''
heapq.heappush(self.openlist, node) def add_in_closelist(self, node):
''' 将node添加到 closelist '''
self.closelist.add((node.x, node.y)) def pop_min_F(self):
''' 弹出openlist中F值最小的节点 '''
return heapq.heappop(self.openlist) def append_Q(self, P):
''' 找到P周围可以探索的节点,将其加入openlist,并返回这些节点 '''
Q = {}
# 将水平或垂直方向的相应方格加入到Q
for dir in self.v_hv:
x, y = P.x + dir[0], P.y + dir[1]
# 如果(x,y)不是障碍物并且不在closelist中,将(x,y)加入到Q
if self.is_in_map(x, y) \
and self.map2d[x][y] != OBSTRUCTION \
and not self.in_closelist(x, y):
node = Node(x, y, P)
Q[(x, y)] = node
heapq.heappush(self.openlist, node) # 将node同时放入openlist中
# 将斜对角的相应方格加入到Q
for dir in self.v_diagonal:
x, y = P.x + dir[0], P.y + dir[1]
# 如果(x,y)不是障碍物,且(x,y)能够与P联通,且(x,y)不在closelist中,将(x,y)加入到Q
if self.is_in_map(x, y) \
and self.map2d[x][y] != OBSTRUCTION \
and self.map2d[x][P.y] != OBSTRUCTION \
and self.map2d[P.x][y] != OBSTRUCTION \
and not self.in_closelist(x, y):
node = Node(x, y, P)
Q[(x, y)] = node
heapq.heappush(self.openlist, node) # 将node同时放入openlist中
return Q def a_search(self):
while self.openlist:
# 找到openlist中F值最小的节点作为探索节点
P = self.pop_min_F()
# 如果P在closelist中,执行下一次循环
if self.in_closelist(P.x, P.y):
continue
# P加入closelist
self.add_in_closelist(P)
# P周围待探索的节点
Q = self.append_Q(P)
# Q中没有任何节点,表示该路径一定不是最短路径,重新从openlist中选择
if not Q:
continue
# 找到了终点, 退出循环
if Q.get(END) is not None:
self.answer = Node(END[0], END[1], P)
break def start(self):
node_start = Node(START[0], START[1], None)
self.add_in_openlist(node_start)
self.a_search() def paint(self):
''' 打印最短路线 '''
node = self.answer
while node is not None:
print((node.x, node.y),
'G={0}, H={1}, F={2}'.format(node.g, node.h, node.get_F()))
node = node.parent if __name__ == '__main__':
map2d = [[0] * 8 for i in range(8)]
map2d[5][4] = 1
map2d[5][5] = 1
map2d[4][5] = 1
map2d[3][5] = 1
map2d[2][5] = 1
START, END = (3, 2), (5, 7)
a_way = Tank_way(map2d)
a_way.start()
a_way.paint()
Tank_way_2省略的代码和Tank_way一致。为了让openlist能够返回F值最小值的节点,需要在Node中添加三个额外的方法。对于pop_min_F()而言,不再需要遍历所有节点,仅仅是从堆顶弹出而已,这将大大缩短程序运行的时间。在Tank_way_2中,用append_Q代替了原来来的get_Q(),这是因为不再需要用Q中的节点和openlist中的节点相比较,仅仅是将Q中的节点添加到openlist中。这样做虽然会使得openlist中存在一些重复节点,不过没关系,对于有相同标记的节点,F值小的那个总是最先弹出,一旦弹出就会加入到closelist中,这意味着当该标记的节点再次弹出时,将不会被使用,也就是说,如果同一个标记的节点被计算了多次F值,总是能够确保使用F值最小的那个,并丢弃其它的。
再战觐天宝匣
基于盲目策略的广度优先收索无法有效完成4阶以上的拼图(可参考搜索的策略(3)——觐天宝匣上的拼图),在理解了A*搜索后,可以用这种启发性策略再次挑战觐天宝匣的拼图。
设计评估函数
如果将拼图的每一次移动看作“一步”,只要能定义出离评估函数和代价函数,就可以像坦克寻径一样使用A*搜索寻找拼图的复原步骤。
我们将g(n)定义为从起点移动到某个状态的步数;h(n)是当前状态到复原状态的距离估值,它用所有碎片的曼哈顿距离之和表示。以3×3的拼图为例,假设拼图的某个状态和复原状态是:

左图中,3号碎片的位置是(2,0),它在复原状态的位置是(1,0),则3号碎片的曼哈顿距离是|2-1|+|0-0|=1。同理,5号碎片的曼哈顿距离是|0-1|+|1-2|=2。左图距复原状态的曼哈顿距离是所有碎片的曼哈顿距离之和:

其中Dn表示第n个碎片的曼哈顿距离,图眼的编号是8。
复原拼图
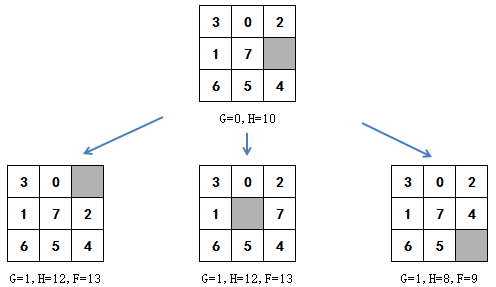
有了g和h就可以开始复原拼图,复原过程和坦克的寻路类似。从拼图的初始状态开始,第一步可以向三个方向探测,从而产生三种状态:
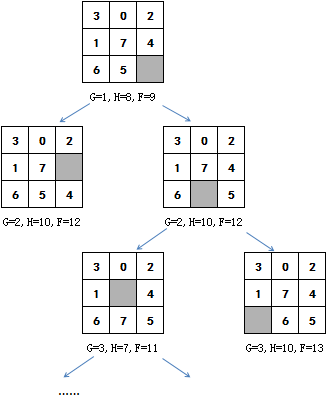
此后每一步都选择最小的F值继续探索,如果F值相同,则选择最后加入openlist中的一个:
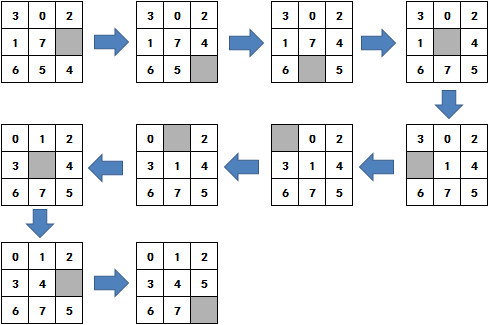
最终的复原步骤如图:
实现A*搜索
拼图的实现和坦克寻径类似,完整代码如下:
import random
import copy
import heapq IMG_END = [] # 拼图的复原状态
EYE_VAL = ' ' # 图眼的值
DIST = {} def get_hash_value(img):
''' 获取img的哈希值 '''
return hash(str(img)) class Node:
def __init__(self, img, x=0, y=0, parent=None):
self.img = img # 当前拼图
self.x, self.y = x, y # 图眼在img中的位置
self.parent = parent # 父节点
self.hash_value = get_hash_value(img) # Node的哈希值
self.h = 0
self.g = 0
self.f = 0 def get_G(self):
''' 当前节点到起点的代价 '''
if self.g != 0:
return self.g
elif self.parent is None:
self.g = 0
else:
self.g = self.parent.get_G() + 1
return self.g def get_H(self):
''' 节点到终点的距离估值 '''
if self.h == 0:
self.h = self.manhattan()
return self.h def get_F(self):
''' 节点的评估值 '''
if self.f == 0:
self.f = self.get_G() + self.get_H()
# self.f = self.get_H()
return self.f def manhattan(self):
'' '当前拼图到复原状态的距离 '''
d = DIST.get(self.hash_value)
if d is not None:
return d dist = 0
x_end, y_end = 0, 0 # img_end 中某一个碎片的位置
n = len(self.img)
for x, row in enumerate(self.img):
for y, piece in enumerate(row):
if piece == IMG_END[x][y]:
continue
# 计算piece碎片在img_end中的位置
if piece == EYE_VAL:
x_end = n - 1
y_end = n - 1
else:
x_end = piece // n
y_end = piece - n * x_end
dist += abs(x - x_end) + abs(y - y_end) DIST[self.hash_value] = dist
return dist def __lt__(self, other):
''' 用于堆比较,返回堆中f最小的一个 '''
return self.get_F() < other.get_F() def __eq__(self, other):
''' 判断Node是否相等 '''
return self.img.hash_value == other.img.hash_value def __ne__(self, other):
''' 判断Node是否不等 '''
return not self.__eq__(other) def __hash__(self):
return self.hash_value class JigsawPuzzle_A:
''' 用A*搜索复原拼图 '''
def __init__(self, level=1, img_start=None):
self.level = level # 难度系数
self.n = len(IMG_END) # 拼图的维度
self.end_hash_value = get_hash_value(IMG_END) # 复原状态的哈希值
# “图眼”移动的方向, 上、左、下、右
self.v_move = [(0, 1), (-1, 0), (0, -1), (1, 0)]
# 设置拼图的初始状态和图眼的位置
if img_start is not None:
self.img_start = img_start
self.eye_x, self.eye_y = self.search_eye(img_start)
else:
self.img_start, self.eye_x, self.eye_y = self.confuse()
self.openlist = []
self.closelist = set()
# 拼图复原步骤
self.answer = None def confuse(self):
''' 创建一个n*n的拼图,返回打乱状态和图眼位置 '''
# 拼图的初始状态
img_start = copy.deepcopy(IMG_END)
from_x, from_y = self.search_eye(IMG_END)
to_x, to_y = from_x, from_y
# 将图眼随机移动 n * n * level次
for i in range(self.n * self.n * self.level):
# 选择一个随机方向
v_x, v_y = random.choice(self.v_move)
to_x, to_y = from_x + v_x, from_y + v_y
if self.enable(to_x, to_y):
# 向选择的随机方向移动
self.move(img_start, from_x, from_y, to_x, to_y)
from_x, from_y = to_x, to_y
else:
to_x, to_y = from_x, from_y return img_start, to_x, to_y def search_eye(self, img):
''' 找到img中图眼的位置 '''
# “图眼”的值是eye_val,打乱顺序后需要寻找到图眼的位置
for x in range(self.n):
for y in range(self.n):
if EYE_VAL == img[x][y]:
return x, y def in_closelist(self, node):
''' node 是否在closelist中 '''
return node.hash_value in self.closelist def add_in_openlist(self, node):
''' node节点加入openlist '''
heapq.heappush(self.openlist, node) def add_in_closelist(self, node):
''' node节点加入closelist '''
self.closelist.add(node.hash_value) def pop_min_F(self):
''' 找到openlist中F值最小的节点 '''
return heapq.heappop(self.openlist) def enable(self, to_x, to_y):
''' 图眼是否能够移动到x,y的位置 '''
return 0 <= to_x < self.n and 0 <= to_y < self.n def move(self, img, from_x, from_y, to_x, to_y):
''' 将图眼从from_x, from_y移动到to_x, to_y '''
img[from_x][from_y], img[to_x][to_y] = img[to_x][to_y], img[from_x][from_y] def append_Q(self, P):
''' 找到P周围可以探索的节点,将其加入openlist,并返回这些节点 '''
Q = {}
for v_x, v_y in self.v_move:
to_x, to_y = P.x + v_x, P.y + v_y
# 检验是否可以向to_x, to_y方向移动
if not self.enable(to_x, to_y):
continue curr_img = copy.deepcopy(P.img)
self.move(curr_img, P.x, P.y, to_x, to_y)
# 如果node是不在closelist中,把node添加到Q中
if not self.in_closelist(Node(curr_img)):
node = Node(curr_img, x=to_x, y=to_y, parent=P)
Q[node.hash_value] = node
self.add_in_openlist(node)
return Q def a_search(self):
''' A*搜索拼图的解 '''
while self.openlist:
# 找到openlist中F值最小的节点作为探索节点
P = self.pop_min_F()
# 如果P在closelist中,执行下一次循环
if self.in_closelist(P):
continue
# P加入closelist
self.add_in_closelist(P)
# P周围待探索的节点
Q = self.append_Q(P)
# Q中没有任何节点,表示该路径一定不是最短路径,重新从openlist中选择
if not Q:
continue
# 找到了终点, 退出循环
if Q.get(self.end_hash_value) is not None:
self.answer = Node(IMG_END, parent=P)
break def start(self):
if self.img_start == IMG_END:
print('start = end')
return
node_start = Node(img=self.img_start, x=self.eye_x, y=self.eye_y)
self.add_in_openlist(node_start)
self.a_search() def display(self):
if self.answer is None:
print('No answer') node = self.answer
while node is not None:
print(node.img)
node = node.parent def create_img_end(n):
''' 创建一个n*n的拼图,将右下角的碎片图指定为图眼 '''
img = []
for i in range(n):
img.append(list(range(n * i, n * i + n)))
img[n - 1][n - 1] = EYE_VAL
return img if __name__ == '__main__':
n = 9
IMG_END = create_img_end(n)
# img_start = [[3, 0, 2], [1, 7, EYE_VAL], [6, 5, 4]]
jigsaw = JigsawPuzzle_A(level=5)
print('start=', jigsaw.img_start, ',eye =', (jigsaw.eye_y, jigsaw.eye_x))
jigsaw.start()
jigsaw.display()
JigsawPuzzle_A中额外设置了难度系数,level的值越大,复原拼图越困难。对于一个拼图来说,level=5已经足以打乱顺序:

九九拼图的复原已经非人力所能解决。JigsawPuzzle_A可以快速复原任意难度的4×4拼图,对于更高阶的拼图,即使是A*搜索,面对的搜索数量依然十分庞大,需要耗费相当长的时间,只有level=1的时候 9×9拼图才能快速得到结果。
作者:我是8位的

A*搜索详解(2)——再战觐天宝匣的更多相关文章
- Elastic Stack 笔记(六)Elasticsearch5.6 搜索详解
博客地址:http://www.moonxy.com 一.前言 Elasticsearch 主要包含索引过程和搜索过程. 索引过程:一条文档被索引到 Elasticsearch 之后,默认情况下 ES ...
- Lucene系列六:Lucene搜索详解(Lucene搜索流程详解、搜索核心API详解、基本查询详解、QueryParser详解)
一.搜索流程详解 1. 先看一下Lucene的架构图 由图可知搜索的过程如下: 用户输入搜索的关键字.对关键字进行分词.根据分词结果去索引库里面找到对应的文章id.根据文章id找到对应的文章 2. L ...
- elasticsearch最全详细使用教程:入门、索引管理、映射详解、索引别名、分词器、文档管理、路由、搜索详解
一.快速入门1. 查看集群的健康状况http://localhost:9200/_cat http://localhost:9200/_cat/health?v 说明:v是用来要求在结果中返回表头 状 ...
- Solr系列五:solr搜索详解(solr搜索流程介绍、查询语法及解析器详解)
一.solr搜索流程介绍 1. 前面我们已经学习过Lucene搜索的流程,让我们再来回顾一下 流程说明: 首先获取用户输入的查询串,使用查询解析器QueryParser解析查询串生成查询对象Query ...
- A*搜索详解(1)——通往基地的最短路线
假设地图上有一片树林,坦克需要绕过树林,走到另一侧的军事基地,在无数条行进路线中,哪条才是最短的? 这是典型的最短寻径问题,可以使用A*算法求解.A*搜索算法俗称A星算法,是一个被广泛应用于路径优化领 ...
- 搜索引擎(Elasticsearch搜索详解)
学完本课题,你应达成如下目标: 掌握ES搜索API的规则.用法. 掌握各种查询用法 搜索API 搜索API 端点地址 GET /twitter/_search?q=user:kimchy GET /t ...
- elasticsearch系列四:搜索详解(搜索API、Query DSL)
一.搜索API 1. 搜索API 端点地址 从索引tweet里面搜索字段user为kimchy的记录 GET /twitter/_search?q=user:kimchy 从索引tweet,user里 ...
- Solr系列六:solr搜索详解优化查询结果(分面搜索、搜索结果高亮、查询建议、折叠展开结果、结果分组、其他搜索特性介绍)
一.分面搜索 1. 什么是分面搜索? 分面搜索:在搜索结果的基础上进行按指定维度的统计,以展示搜索结果的另一面信息.类似于SQL语句的group by 分面搜索的示例: http://localhos ...
- elasticsearch最全详细使用教程:搜索详解
一.搜索API 1. 搜索API 端点地址从索引tweet里面搜索字段user为kimchy的记录 GET /twitter/_search?q=user:kimchy从索引tweet,user里面搜 ...
随机推荐
- 查询数据库:models.Books.objects.all()[10: 20]与models.Books.objects.filter(id__gt=10, id__lt=20).values() 的区别
1. models.Books.objects.all()[10: 20] (10:20 之间是冒号,不是逗号.)查出的是 QuerySet对象,如需进行操作,得进一步进行剥皮. 查询代码: 查询结 ...
- python3读取sqlyog配置文件中的MySql密码
这个人有什么目的?: 我多多少少听过一些安全圈的大牛说到类似的思路,大意是可以通过扫描各种程序和服务的配置文件(比如SVN的文件,RSYNC的配置文件等), 从中发现敏感信息,从而找到入侵的突破口.沿 ...
- 判断一个js对象是否是Array
今天在做题时遇到这个问题,找答案的时候,发现评论里大神好多 . 在开发中,我们经常需要判断某个对象是否为数组类型,总结判断某个对象是否是数组的方法. 1.typeof 操作符 对于Function, ...
- WordCount(java)
github项目链接 https://gitee.com/huwenli/Wc.git 1.项目简介 WordCount的需求可以概括为:对程序设计语言源文件统计字符数.单词数.行数,统计结果以指定格 ...
- 【转】Android-Input input&按键布局文件
https://source.android.com/devices/input 输入 Android 输入子系统名义上是由遍历系统多个层的事件管道组成. 输入管道 在最低层,物理输入设备会生成描述状 ...
- Angular 2/4/5+ 重复点击菜单刷新界面
记一下,网上没找到方法 自己搞了好久 通过跳转到别的界面在跳回来的方式进行实现 //再次点击刷新界面 if (this.router.url == item.ur ...
- windows 10安装docker一直挂起在Installing Components and Removing Files
碰到这个问题百度了好久都没有找到解决方式,什么用管理员方式运行,给文件夹权限啊,都不好使. 后面在bing上面搜docker install compoents关键字找到一条结果,如下如 点进链接,内 ...
- C++编程题#1:含k个3的数
描述 输入二个正整数m 和 k,其中1 < m < 100000,1 < k <5 ,判断m 能否被19整除,且恰好含有k个3,如果满足条件,则输出YES,否则,输出NO. 例 ...
- DPDK - gsg文档(介绍与编译)
&& Hugepage 提前分配hugepage内存,可以减少虚拟页地址转换到物理地址所需的时间. 相关命令: 在虚拟机上运行时,在没有NUMA的机器上,执行“echo 1024 &g ...
- 微信小程序登录(包括获取不到unionid的情况)
我们一般都是先获取到微信的 unionid,然后再通过 unionid 去登录自己的网站,就可以关联到用户在自己网站上的 user_id,但是在小程序登录中,有时候可以获取到 unionid,有时候获 ...