Linux输入设备详解

struct input_dev {
void *private;
const char *name;
const char *phys;
const char *uniq;
struct inBITS(KEY_MAX)]; //按键事件支持的子事件类型
unsigned long relbit[NBITS(REL_MAX)];
unsigned long absbit[NBITS(ABS_Mput_id id; //与input_handler匹配用的id
unsigned long evbit[NBITS(EV_MAX)]; //设备支持的事件类型
unsigned long keybit[NAX)]; //绝对坐标事件支持的子事件类型
unsigned long mscbit[NBITS(MSC_MAX)];
unsigned long ledbit[NBITS(LED_MAX)];
unsigned long sndbit[NBITS(SND_MAX)];
unsigned long ffbit[NBITS(FF_MAX)];
unsigned long swbit[NBITS(SW_MAX)];
int ff_effects_max;
unsigned int keycodemax;
unsigned int keycodesize;
void *keycode;
unsigned int repeat_key;
struct timer_list timer;
struct pt_regs *regs;
int state;
int sync;
int abs[ABS_MAX + ];
int rep[REP_MAX + ];
unsigned long key[NBITS(KEY_MAX)];
unsigned long led[NBITS(LED_MAX)];
unsigned long snd[NBITS(SND_MAX)];
unsigned long sw[NBITS(SW_MAX)];
int absmax[ABS_MAX + ]; //绝对坐标事件的最大键值
int absmin[ABS_MAX + ]; //绝对坐标事件的最小键值
int absfuzz[ABS_MAX + ];
int absflat[ABS_MAX + ];
int (*open)(struct input_dev *dev);
void (*close)(struct input_dev *dev);
int (*accept)(struct input_dev *dev, struct file *file);
int (*flush)(struct input_dev *dev, struct file *file);
int (*event)(struct input_dev *dev, unsigned int type, unsigned int code, int value);
int (*upload_effect)(struct input_dev *dev, struct ff_effect *effect);
int (*erase_effect)(struct input_dev *dev, int effect_id);
struct input_handle *grab; //当前占有该设备的handle
struct mutex mutex; /* serializes open and close operations */
unsigned int users; //打开该设备的用户量
struct class_device cdev;
struct device *dev; /* will be removed soon */
int dynalloc; /* temporarily */
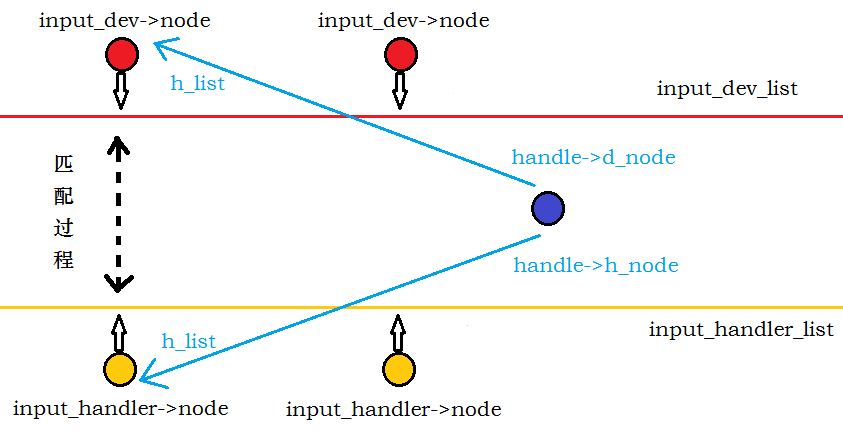
struct list_head h_list; //该链表头用于链接该设备所关联的input_handle
struct list_head node; //该链表头用于将设备链接到input_dev_list
};
struct list_head {
struct list_head *next, *prev;
};
struct input_handler {
void *private;
void (*event)(struct input_handle *handle, unsigned int type, unsigned int code, int value);
struct input_handle* (*connect)(struct input_handler *handler, struct input_dev *dev, struct input_device_id *id);
void (*disconnect)(struct input_handle *handle);
const struct file_operations *fops; //提供给用户对设备操作的函数指针
int minor;
char *name;
struct input_device_id *id_table; //与input_dev匹配用的id
struct input_device_id *blacklist; //标记的黑名单
struct list_head h_list; //用于链接和该handler相关的handle
struct list_head node; //用于将该handler链入input_handler_list
};
struct input_handle {
void *private;
int open; //记录设备打开次数
char *name;
struct input_dev *dev; //指向所属的input_dev
struct input_handler *handler; //指向所属的input_handler
struct list_head d_node; //用于链入所指向的input_dev的handle链表
struct list_head h_node; //用于链入所指向的input_handler的handle链表
};
static int __init xxx_probe(struct platform_device *pdev)
{
…
if (!(tsdev = input_allocate_device()))
{
printk(KERN_ERR "tsdev: not enough memory\n");
err = -ENOMEM;
goto fail;
}
…
tsdev->name = "xxx TouchScreen"; //xxx为芯片型号
tsdev ->phys = "xxx/event0";
tsdev ->id.bustype = BUS_HOST; //设备id,用于匹配handler的id
tsdev ->id.vendor = 0x0005;
tsdev ->id.product = 0x0001;
tsdev ->id.version = 0x0100;
tsdev ->open = xxx_open;
tsdev ->close =xxx_close;
tsdev ->evbit[] = BIT(EV_KEY) | BIT(EV_ABS) | BIT(EV_SYN); //设置支持的事件类型
tsdev ->keybit[LONG(BTN_TOUCH)] = BIT(BTN_TOUCH);
input_set_abs_params(tsdev, ABS_X, , 0x400, , ); //限定绝对坐标X的取值范围
input_set_abs_params(tsdev, ABS_Y, , 0x400, , ); //同上
input_set_abs_params(tsdev, ABS_PRESSURE, , , , ); //触摸屏压力值范围
… If(input_register_device(tsdev) == error) //注册设备
goto fail; … fail:
input_free_device(tsdev);
printk(“ts probe failed\n”);
return err;
}
struct input_dev *input_allocate_device(void)
{
struct input_dev *dev;
dev = kzalloc(sizeof(struct input_dev), GFP_KERNEL);
if (dev) {
dev->dynalloc = 1;
dev->cdev.class = &input_class;
class_device_initialize(&dev->cdev);
INIT_LIST_HEAD(&dev->h_list);
INIT_LIST_HEAD(&dev->node);
}
return dev;
}int input_register_device(struct input_dev *dev)
{
static atomic_t input_no = ATOMIC_INIT(); //定义原子变量,禁止线程并发访问
struct input_handle *handle; //定义一些变量备后文使用
struct input_handler *handler;
struct input_device_id *id;
const char *path;
int error;
if (!dev->dynalloc) {
printk(KERN_WARNING "input: device %s is statically allocated, will not register\n"
"Please convert to input_allocate_device() or contact dtor_core@ameritech.net\n",
dev->name ? dev->name : "<Unknown>");
return -EINVAL;
}
mutex_init(&dev->mutex); //互斥锁初始化,防止临界区代码被并发访问
set_bit(EV_SYN, dev->evbit); //设置支持同步事件,input设备全部默认支持同步事件
/*
* If delay and period are pre-set by the driver, then autorepeating
* is handled by the driver itself and we don't do it in input.c.
*/
init_timer(&dev->timer);
if (!dev->rep[REP_DELAY] && !dev->rep[REP_PERIOD]) {
dev->timer.data = (long) dev;
dev->timer.function = input_repeat_key;
dev->rep[REP_DELAY] = ;
dev->rep[REP_PERIOD] = ;
}
INIT_LIST_HEAD(&dev->h_list); //初始化需要关联的handle链表头
list_add_tail(&dev->node, &input_dev_list); //将设备添加到input_dev_list中
dev->cdev.class = &input_class;
snprintf(dev->cdev.class_id, sizeof(dev->cdev.class_id),
"input%ld", (unsigned long) atomic_inc_return(&input_no) - );
error = class_device_add(&dev->cdev);
if (error)
return error;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_attr_group);
if (error)
goto fail1;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_id_attr_group);
if (error)
goto fail2;
error = sysfs_create_group(&dev->cdev.kobj, &input_dev_caps_attr_group);
if (error)
goto fail3;
__module_get(THIS_MODULE);
path = kobject_get_path(&dev->cdev.kobj, GFP_KERNEL);
printk(KERN_INFO "input: %s as %s\n",
dev->name ? dev->name : "Unspecified device", path ? path : "N/A");
kfree(path);
/*** 遍历input_handler_list上全部的handler,寻找与该设备匹配的handler ***/
list_for_each_entry(handler, &input_handler_list, node)
if (!handler->blacklist || !input_match_device(handler->blacklist, dev))
if ((id = input_match_device(handler->id_table, dev)))
if ((handle = handler->connect(handler, dev, id)))
input_link_handle(handle);
input_wakeup_procfs_readers();
return ;
fail3: sysfs_remove_group(&dev->cdev.kobj, &input_dev_id_attr_group);
fail2: sysfs_remove_group(&dev->cdev.kobj, &input_dev_attr_group);
fail1: class_device_del(&dev->cdev);
return error;
}
static inline void INIT_LIST_HEAD(struct list_head *list)
{
list->next = list;
list->prev = list;
}
static inline void list_add_tail(struct list_head *new, struct list_head *head)
{
__list_add(new, head->prev, head);
}
static inline void __list_add(struct list_head *new,
struct list_head *prev,
struct list_head *next)
{
next->prev = new;
new->next = next;
new->prev = prev;
prev->next = new;
}
static LIST_HEAD(input_dev_list);
static LIST_HEAD(input_handler_list);
#define LIST_HEAD_INIT(name) { &(name), &(name) }
#define LIST_HEAD(name) \
struct list_head name = LIST_HEAD_INIT(name)
//先看list_for_each_entry(handler, &input_handler_list, node),list_for_each_entry在list.h中有定义,其作用相当于一个for循环。其约等价于:(个人理解)
for(handler = input_handler_list表头所属的input_handler结构体地址;handler != input_handler_list表尾所属的input_handler结构体地址;handler++)
{
}if (!handler->blacklist || !input_match_device(handler->blacklist, dev))//判断该handler没有被列入黑名单或者黑名单匹配不成功的话则继续
if ((id = input_match_device(handler->id_table, dev))) //将设备id与handler的id进行匹配,成功则继续往下
if ((handle = handler->connect(handler, dev, id))) //链接device与handler,成功则继续往下
input_link_handle(handle); //将handle链入input_handler_list和input_dev_list
继续跟踪进这些函数
static struct input_device_id *input_match_device(struct input_device_id *id, struct input_dev *dev)
{
int i;
for (; id->flags || id->driver_info; id++) {
if (id->flags & INPUT_DEVICE_ID_MATCH_BUS) //匹配handler和device id的flag标志位
if (id->bustype != dev->id.bustype)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VENDOR)
if (id->vendor != dev->id.vendor)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_PRODUCT)
if (id->product != dev->id.product)
continue;
if (id->flags & INPUT_DEVICE_ID_MATCH_VERSION)
if (id->version != dev->id.version)
continue;
MATCH_BIT(evbit, EV_MAX); //匹配id相关标志位
MATCH_BIT(keybit, KEY_MAX);
MATCH_BIT(relbit, REL_MAX);
MATCH_BIT(absbit, ABS_MAX);
MATCH_BIT(mscbit, MSC_MAX);
MATCH_BIT(ledbit, LED_MAX);
MATCH_BIT(sndbit, SND_MAX);
MATCH_BIT(ffbit, FF_MAX);
MATCH_BIT(swbit, SW_MAX);
return id;
}
return NULL;
}
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
struct evdev {
int exist;
int open;
int minor;
char name[16];
struct input_handle handle; //关联input_handler和input_dev的input_handle
wait_queue_head_t wait;
struct evdev_list *grab;
struct list_head list;
};#define EVDEV_MINORS 32
static struct evdev *evdev_table[EVDEV_MINORS];
static void input_link_handle(struct input_handle *handle)
{
list_add_tail(&handle->d_node, &handle->dev->h_list);
list_add_tail(&handle->h_node, &handle->handler->h_list);
}
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops,
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids,
};
static struct input_handler evdev_handler = {
.event = evdev_event,
.connect = evdev_connect,
.disconnect = evdev_disconnect,
.fops = &evdev_fops, //用户对设备操作的函数指针
.minor = EVDEV_MINOR_BASE,
.name = "evdev",
.id_table = evdev_ids, //指向一个evedev的指针数组
};
static struct file_operations evdev_fops = {
.owner = THIS_MODULE,
.read = evdev_read,
.write = evdev_write,
.poll = evdev_poll,
.open = evdev_open,
.release = evdev_release,
.unlocked_ioctl = evdev_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = evdev_ioctl_compat,
#endif
.fasync = evdev_fasync,
.flush = evdev_flush
};
static struct input_device_id evdev_ids[] = {
{ .driver_info = }, /* Matches all devices */
{ }, /* Terminating zero entry */
};
MODULE_DEVICE_TABLE(input, evdev_ids);
static int __init evdev_init(void)
{
input_register_handler(&evdev_handler);
return ;
}
void input_register_handler(struct input_handler *handler)
{
struct input_dev *dev;
struct input_handle *handle;
struct input_device_id *id;
if (!handler) return;
INIT_LIST_HEAD(&handler->h_list);
if (handler->fops != NULL)
input_table[handler->minor >> ] = handler;
list_add_tail(&handler->node, &input_handler_list);
list_for_each_entry(dev, &input_dev_list, node)
if (!handler->blacklist || !input_match_device(handler->blacklist, dev))
if ((id = input_match_device(handler->id_table, dev)))
if ((handle = handler->connect(handler, dev, id)))
input_link_handle(handle);
input_wakeup_procfs_readers();
}
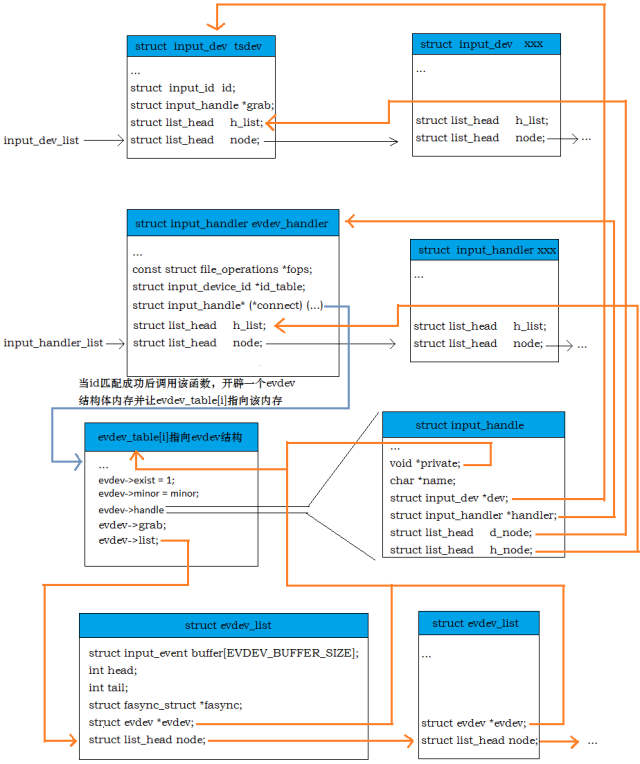
struct evdev_list {
struct input_event buffer[EVDEV_BUFFER_SIZE]; //存放设备数据信息
int head; //buffer的下标,标识从设备中过来要存放到buffer的数据的位置
int tail; //buffer的下标,标识用户读取buffer中数据的下标位置
struct fasync_struct *fasync;
struct evdev *evdev;
struct list_head node;
};
struct input_event {
struct timeval time;
__u16 type;
__u16 code;
__s32 value;
};
static int evdev_open(struct inode * inode, struct file * file)
{
struct evdev_list *list; //定义一个evdev_list结构体
int i = iminor(inode) - EVDEV_MINOR_BASE;
int accept_err; if (i >= EVDEV_MINORS || !evdev_table[ i] || !evdev_table[ i]->exist)
return -ENODEV; if ((accept_err = input_accept_process(&(evdev_table[ i]->handle), file)))
return accept_err; if (!(list = kzalloc(sizeof(struct evdev_list), GFP_KERNEL))) //开辟evdev_list结构体内存空间
return -ENOMEM; list->evdev = evdev_table[ i]; //令结构体中的evdev指针指向evdec_table[ i]
list_add_tail(&list->node, &evdev_table[ i]->list); //加入链表
file->private_data = list; if (!list->evdev->open++) //如果设备没有被open,则继续if操作
if (list->evdev->exist)
input_open_device(&list->evdev->handle); //打开设备 return ;
}
int input_open_device(struct input_handle *handle)
{
struct input_dev *dev = handle->dev;
int err; err = mutex_lock_interruptible(&dev->mutex);
if (err)
return err;
handle->open++; //handle的内部成员open++
if (!dev->users++ && dev->open)
err = dev->open(dev);
if (err)
handle->open--; mutex_unlock(&dev->mutex); return err;
}
input_report_key(tsdev, BTN_TOUCH, ); //报告按键被按下事件
input_report_abs(tsdev, ABS_X, x); //报告触摸屏被按下的x坐标值
input_report_abs(tsdev, ABS_Y, y); //报告触摸屏被按下的y坐标值
input_report_abs(tsdev, ABS_PRESSURE, ); //报告触摸屏被按下的压力值(0或者1)
input_sync(tsdev); //报告同步事件,表示一次事件结束
input_report_key(tsdev, BTN_TOUCH, ); //报告按键被松开事件
input_report_abs(tsdev, ABS_PRESSURE, ); //报告触摸屏被按下的压力值(0或者1)
input_sync(tsdev); //报告同步事件,表示一次事件结束
static inline void input_report_key(struct input_dev *dev, unsigned int code, int value)
{
input_event(dev, EV_KEY, code, !!value);
}
static inline void input_report_abs(struct input_dev *dev, unsigned int code, int value)
{
input_event(dev, EV_ABS, code, value);
}
void input_event(struct input_dev *dev, unsigned int type, unsigned int code, int value)
{
struct input_handle *handle; if (type > EV_MAX || !test_bit(type, dev->evbit))
return; add_input_randomness(type, code, value); switch (type) { … case EV_KEY: //判断为按键事件 if (code > KEY_MAX || !test_bit(code, dev->keybit) || !!test_bit(code, dev->key) == value)
return; if (value == )
break; change_bit(code, dev->key); if (test_bit(EV_REP, dev->evbit) && dev->rep[REP_PERIOD] && dev->rep[REP_DELAY] && dev->timer.data && value) {
dev->repeat_key = code;
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(dev->rep[REP_DELAY]));
} case EV_ABS: //判断为绝对坐标事件 if (code > ABS_MAX || !test_bit(code, dev->absbit))
return; if (dev->absfuzz[code]) {
if ((value > dev->abs[code] - (dev->absfuzz[code] >> )) &&
(value < dev->abs[code] + (dev->absfuzz[code] >> )))
return; if ((value > dev->abs[code] - dev->absfuzz[code]) &&
(value < dev->abs[code] + dev->absfuzz[code]))
value = (dev->abs[code] * + value) >> ; if ((value > dev->abs[code] - (dev->absfuzz[code] << )) &&
(value < dev->abs[code] + (dev->absfuzz[code] << )))
value = (dev->abs[code] + value) >> ;
} if (dev->abs[code] == value)
return; dev->abs[code] = value;
break; … } if (type != EV_SYN)
dev->sync = ; if (dev->grab) //判断有没有声明自定义的处理函数(初始化过程中显然没有定义)
dev->grab->handler->event(dev->grab, type, code, value);
else
list_for_each_entry(handle, &dev->h_list, d_node) //遍历handle链表
if (handle->open) //如果某节点上的处理程序被打开了
handle->handler->event(handle, type, code, value); //调用处理函数
}
static void evdev_event(struct input_handle *handle, unsigned int type, unsigned int code, int value)
{
struct evdev *evdev = handle->private;
struct evdev_list *list; if (evdev->grab) { //显然grab并没有被设置,该条件为假
list = evdev->grab; do_gettimeofday(&list->buffer[list->head].time);
list->buffer[list->head].type = type;
list->buffer[list->head].code = code;
list->buffer[list->head].value = value;
list->head = (list->head + ) & (EVDEV_BUFFER_SIZE - ); kill_fasync(&list->fasync, SIGIO, POLL_IN);
} else
list_for_each_entry(list, &evdev->list, node) { do_gettimeofday(&list->buffer[list->head].time); //给buffer成员赋值
list->buffer[list->head].type = type;
list->buffer[list->head].code = code;
list->buffer[list->head].value = value;
list->head = (list->head + ) & (EVDEV_BUFFER_SIZE - ); kill_fasync(&list->fasync, SIGIO, POLL_IN);
} wake_up_interruptible(&evdev->wait); //用来唤醒一个等待队列(我也不懂)
}
static ssize_t evdev_read(struct file * file, char __user * buffer, size_t count, loff_t *ppos)
{
struct evdev_list *list = file->private_data;
int retval; if (count < evdev_event_size())//每次读取的字节数至少是input_event的大小
return -EINVAL;
if (list->head == list->tail && list->evdev->exist && (file->f_flags & O_NONBLOCK)) //是否满足读取条件
return -EAGAIN;
retval = wait_event_interruptible(list->evdev->wait,
list->head != list->tail || (!list->evdev->exist)); //等待唤醒,和前面说的等待队列对应(我也不懂)
if (retval)
return retval;
if (!list->evdev->exist)
return -ENODEV;
while (list->head != list->tail && retval + evdev_event_size() <= count) {
struct input_event *event = (struct input_event *) list->buffer + list->tail;
if (evdev_event_to_user(buffer + retval, event)) //复制数据到用户空间
return -EFAULT;
list->tail = (list->tail + ) & (EVDEV_BUFFER_SIZE - );
retval += evdev_event_size();
}
return retval;
}
static int evdev_event_to_user(char __user *buffer, const struct input_event *event)
{
if (copy_to_user(buffer, event, sizeof(struct input_event)))
return -EFAULT; return ;
}
<wiz_tmp_tag id="wiz-table-range-border" contenteditable="false" style="display: none;">
Linux输入设备详解的更多相关文章
- Linux命令详解之—tail命令
tail命令也是一个非常常用的文件查看类的命令,今天就为大家介绍下Linux tail命令的用法. 更多Linux命令详情请看:Linux命令速查手册 Linux tail命令主要用来从指定点开始将文 ...
- Linux命令详解之—less命令
Linux下还有一个与more命令非常类似的命令--less命令,相比于more命令,less命令更加灵活强大一些,今天就给大家介绍下Linux下的less命令. 更多Linux命令详情请看:Linu ...
- Linux命令详解之—more命令
Linux more命令同cat命令一样,多用来查看文件内容,本文就为大家介绍下Linux more命令的用法. 更多Linux命令详情请看:Linux命令速查手册 Linux的more命令类似 ca ...
- 【转】linux命令详解:md5sum命令
[转]linux命令详解:md5sum命令 转自:http://blog.itpub.net/29320885/viewspace-1710218/ 前言 在网络传输.设备之间转存.复制大文件等时,可 ...
- Linux命令详解之—cat命令
cat命令的功能是连接文件或标准输入并打印,今天就为大家介绍下Linux中的cat命令. 更多Linux命令详情请看:Linux命令速查手册 Linux 的cat命令通常用来显示文件内容,也可以用来将 ...
- Linux命令详解之—pwd命令
Linux的pwd命令也是一个非常常用的命令,本文为大家介绍下Linux中pwd命令的用法. 更多Linux命令详情请看:Linux命令速查手册 Linux pwd命令用于显示工作目录. 执行pwd指 ...
- Linux命令详解之–cd命令
cd命令是linux实际使用当中另一个非常重要的命令,本文就为大家介绍下Linux中cd命令的用法. 更多Linux命令详情请看:Linux命令速查手册 Linux cd命令用于切换当前工作目录至 d ...
- Linux命令详解之–ls命令
今天开始为大家介绍下Linux中常用的命令,首先给大家介绍下Linux中使用频率最高的命令--ls命令. 更多Linux命令详情请看:Linux命令速查手册 linux ls命令用于显示指定工作目录下 ...
- Linux 系统结构详解
Linux 系统结构详解 Linux系统一般有4个主要部分: 内核.shell.文件系统和应用程序.内核.shell和文件系统一起形成了基本的操作系统结构,它们使得用户可以运行程序.管理文件并使用系统 ...
随机推荐
- memcmp与strncmp函数【转】
c中strncmp与memcmp的区别 函数:int memcmp (const void *a1, const void *a2, size_t size) 函数memcmp用于比较字 ...
- input 子系统架构总结【转】
Linux输入子系统(Input Subsystem) 转自:http://blog.csdn.net/lbmygf/article/details/7360084 Linux 的输入子系统不仅支持鼠 ...
- awk对列/行进行统计求和【转】
场景]--类似于excel中的sum函数对列/行进行统计求和 A01 A02 A03 A09 [要求1]--对列进行统计求和 A01 A02 A03 A09 TOTAL [要求2]--对行进行统计求和 ...
- linux软链接和硬链接的区别
硬链接:ln 3.txt 4 相当于把源文件复制了一份 软连接:ln -s 3.txt 5 相当于快捷方式 改动源文件4.5同时更新,删除3.txt ,5不存在,4存在的.
- WebRTC服务器——Licode 环境搭建
WebRTC服务器--Licode 环境搭建 系统配置 阿里云服务器 Ubuntu 14.04.5 LTS Docker 环境搭建 在一台空的机器上搭建docker环境,先要安装docker,执行下面 ...
- 关于windows2008r2系统80端口被system进程占用的问题
80端口被system占用的问题 今天启动tomcat的时候发现无法启动80端口被占用 通过netstat -ano查看,发现被pid=4的进程占用 检查进程发现是system进程pid=4给占用 ...
- Maven编译时,出现找不到符号
解决办法: 如果使用的是聚合工程 1.执行project--clean(eclipse)或者build project(intellij),将项目清理一下. 2.执行聚合工程中的 Maven--cl ...
- wordpress安装主题时提示无法创建目录
直接上解决办法: 找到wp-content文件夹(我的是在/home/wwwroot/default/wp-cotent) 首先给wp-content这个文件夹一个权限 chmod -R 775 wp ...
- [工具/PC]计算机中丢失libiconv-2.dll,丢失libintl-8.dll,无法定位程序输入点libiconv于动态链接库libiconv-2.dll上问题解决方法
CodeBlocks 1. 背景,为了学习C语言,在win系统上下载了codeBlock,先简单介绍下:Code::Blocks 是一个开放源码的全功能的跨平台C/C++集成开发环境. Code::B ...
- LeetCode(4):两个排序数组的中位数
Hard! 题目描述: 有两个大小为 m 和 n 的排序数组 nums1 和 nums2 . 请找出两个排序数组的中位数并且总的运行时间复杂度为 O(log (m+n)) . 示例 1: nums1 ...