ROS入门学习(基于Ubuntu16.04+kinetic)
本文主要部分全部来源于ROS官网的Tutorials.
Setup
roscore # making sure that we have roscore running
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key # Now you can use the arrow keys of the keyboard to drive the turtle around.
ROS Topics
sudo apt-get install ros-kinetic-rqt
sudo apt-get install ros-kinetic-rqt-common-plugins
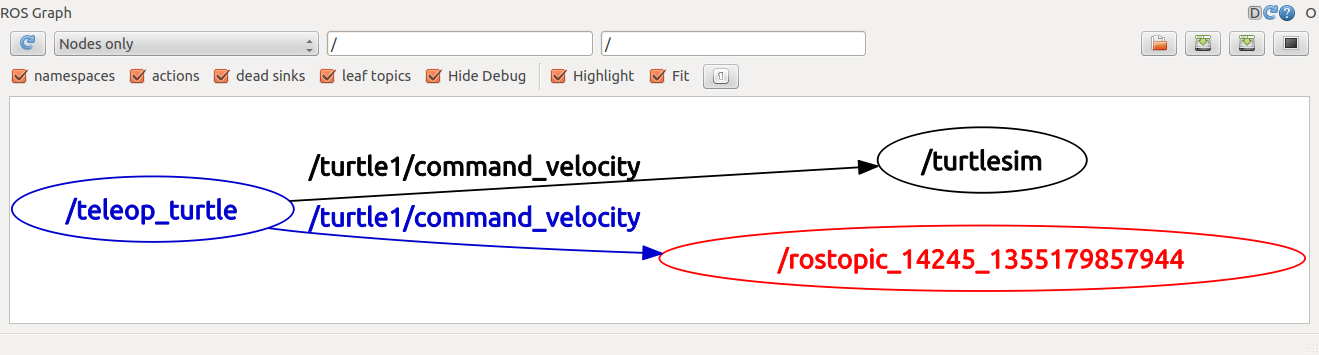
rosrun rqt_graph rqt_graph
rostopic -h
rostopic echo /turtle1/cmd_vel # you will now see topic datas when you press the arrow key in turtle_teleop_key terminal
rostopic list -h # figure out what argument the list sub-command needs
rostopic list -v # displays a verbose list of topics to publish to and subscribe to and their type
rostopic type /turtle1/cmd_vel # You should get the message type of the topic: geometry_msgs/Twist
rosmsg show geometry_msgs/Twist # look at the details of the message using rosmsg
Using rostopic pub
# publishes data on to a topic, rostopic pub [topic] [msg_type] [args]
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
# publishes the velocity commands at a rate of 1 Hz on the velocity topic
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
# Now We can also look at what is happening in rqt_graph.
# and see the data published by our turtlesim
rostopic echo /turtle1/pose
# see how fast the turtlesim_node is publishing /turtle1/pose, $ rostopic hz [topic]
rostopic hz /turtle1/pose
# get in depth information about a topic
rostopic type /turtle1/cmd_vel | rosmsg show
Using rqt_plot
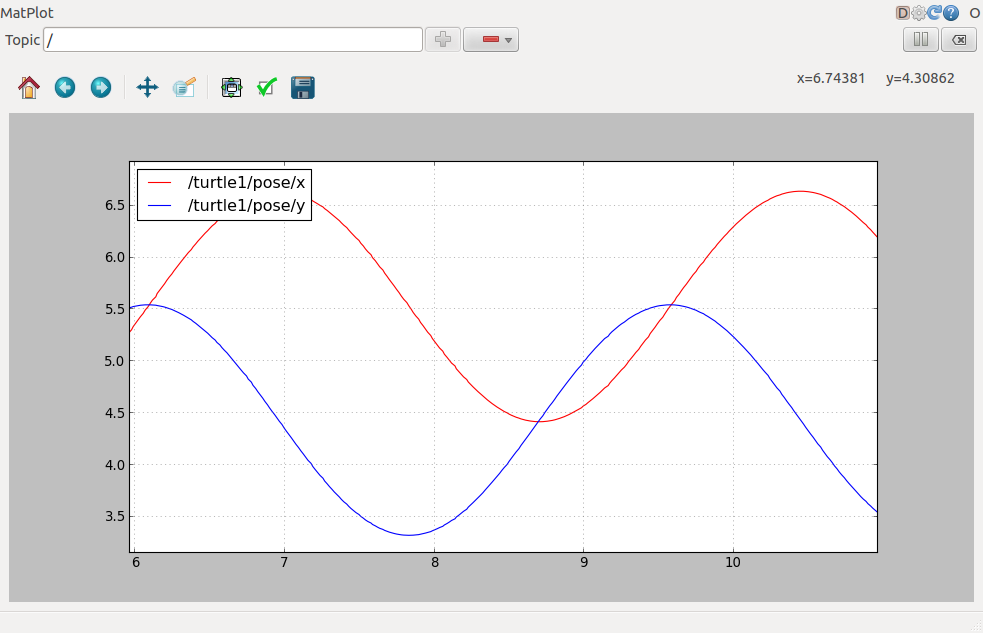
rosrun rqt_plot rqt_plot
# a text box in the upper left corner gives you the ability to add any topic to the plot.
# Typing /turtle1/pose/x and add it.
# Typing /turtle1/pose/y and add it.
ROS Services and Parameters
rosservice list # shows us that the turtlesim node provides nine services
rosservice type /clear # find out what type the clear service is
rosservice call /clear # clears the background of the turtlesim_node # look at the case where the service has arguments by looking at the information for the service spawn
rosservice type /spawn | rossrv show
rosservice call /spawn 2 2 0.2 "" # spawn a new turtle at a given location and orientation rosparam list # look at what parameters are currently on the param server
rosparam set /background_r 150 # change the red channel of the background color
rosservice call /clear # call the clear service for the parameter change to take effect
rosparam get /background_g # get the value of the green background channel
rosparam get / # show us the contents of the entire Parameter Serve rosparam dump params.yaml # write all the parameters to the file ./params.yaml (current directory)
rosparam load params.yaml copy # load these yaml files into new namespaces
rosparam get /copy/background_b
Using rqt_console and roslaunch
This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once.
sudo apt-get install ros-kinetic-rqt ros-kinetic-rqt-common-plugins ros-kinetic-turtlesim # in two new terminals start rqt_console and rqt_logger_level
rosrun rqt_console rqt_console
rosrun rqt_logger_level rqt_logger_level rosrun turtlesim turtlesim_node # Since the default logger level is INFO you will see any info that the turtlesim publishes when it starts up
roscd beginner_tutorials
mkdir launch
cd launch
gedit turtlemimic.launch
<launch> <group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group> <group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group> <node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node> </launch>
roslaunch beginner_tutorials turtlemimic.launch
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]' # the two turtlesims start moving even though the publish command is only being sent to turtlesim1
Using rosed to edit files in ROS
rosed roscpp Logger.msg # demonstrates how you would edit the Logger.msg file within the roscpp package rosed roscpp <tab><tab> # tab auto complete echo "export EDITOR='gedit -w'" >> ~/.bashrc
source ~/.bashrc
echo $EDITOR
rosed roscpp Logger.msg # This time file will be open by The more beginner-friendly editor
Creating a ROS msg and srv
- msg: msg files are simple text files that describe the fields of a ROS message. They are used to generate source code for messages in different languages.
- srv: an srv file describes a service. It is composed of two parts: a request and a response.
Aboat Msg
$ roscd beginner_tutorials
$ mkdir msg
$ echo "int64 num" > msg/Num.msg rosed beginner_tutorials package.xml
Open package.xml, and make sure these two lines are in it.
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
rosed beginner_tutorials CMakeLists.txt
Modify it like this:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
...
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
...
add_message_files(
FILES
Num.msg
)
...
generate_messages(
DEPENDENCIES
std_msgs
)
...
Make sure ROS can see it.
rosmsg show beginner_tutorials/Num # You will see: int64 num
rosmsg show Num # You will see: [beginner_tutorials/Num]: int64 num
Aboat srv
$ roscd beginner_tutorials
$ mkdir srv
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
$ rosed beginner_tutorials CMakeLists.txt
Modify it like this:
...
add_service_files(
FILES
AddTwoInts.srv
)
...
make sure that ROS can see it using the rossrv show command
rossrv show beginner_tutorials/AddTwoInts
rossrv show AddTwoInts
Now that we have made some new messages we need to make our package again:
$ roscd beginner_tutorials
$ cd ../..
$ catkin_make install
$ cd -
Any .msg file in the msg directory will generate code for use in all supported languages. The C++ message header file will be generated in ~/catkin_ws/devel/include/beginner_tutorials/.
rosmsg -h
Review
Let's just list some of the commands we've used so far:
- rospack = ros+pack(age) : provides information related to ROS packages
roscd = ros+cd : changes directory to a ROS package or stack
rosls = ros+ls : lists files in a ROS package
roscp = ros+cp : copies files from/to a ROS package
- rosmsg = ros+msg : provides information related to ROS message definitions
- rossrv = ros+srv : provides information related to ROS service definitions
- catkin_make : makes (compiles) a ROS package
- rosmake = ros+make : makes (compiles) a ROS package (if you're not using a catkin workspace)
ROS入门学习(基于Ubuntu16.04+kinetic)的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 基于ubuntu16.04部署IBM开源区块链项目-弹珠资产管理(Marbles)
前言 本教程基本上是对Marbles项目的翻译过程. 如果英文比较好的话,建议根据官方操作说明,一步步进行环境部署.当然你也可以参考本教程在自己的主机上部署该项目. Marbles 介绍 关于 Mar ...
- 基于ubuntu16.04快速构建Hyperledger Fabric网络
前言 最近在参加一个比赛,使用到了区块链的开源软件hyperledger,由于之前从未接触过区块链,以及和区块链开发相关的内容,所有在网上查阅了大量的资料,并且通过学习yeasy(杨宝华)开源的入门书 ...
- ROS入门学习
ROS学习笔记 ROS入门网站; ROS入门书籍 ROS主要包含包括功能包.节点.话题.消息类型和服务; ROS功能包/软件包(Packages) ROS软件包是一组用于实现特定功能的相关文件的集合, ...
- C#码农的大数据之路 - 使用Ambari自动化安装HDP2.6(基于Ubuntu16.04)并运行.NET Core编写的MR作业
准备主机 准备3台主机,名称作用如下: 昵称 Fully Qualified Domain Name IP 作用 Ubuntu-Parrot head1.parrot 192.168.9.126 Am ...
- 基于Ubuntu16.04的GeForce GTX 1080驱动安装,遇到的问题及对应的解决方法
1.在主机上插上GPU之后,查看设备: $ nvidia-smi Tue Dec :: +------------------------------------------------------- ...
- Kubernetes入门学习--在Ubuntu16.0.4安装配置Minikube
目 录 一. 安装minikube环境 1.1. 安装前准备 1.2. 安装Lantern 1.2.1. Lantern下载网站 1.2.2. Lantern下载地址 1.2.3. Lantern安装 ...
- 深度学习caffe:Ubuntu16.04安装指南(1)
caffe [CPU ONLY] 2017-01-15 最简单的安装配置方式: 不用GPU加速,使用OPENCV2.4图像库, 这是根据官方教程(链接如下)简化而得到. Ubuntu 16.04 or ...
- Hadoop完全分布式环境搭建(三)——基于Ubuntu16.04安装和配置Java环境
[系统环境] 1.宿主机OS:Win10 64位 2.虚拟机软件:VMware WorkStation 12 3.虚拟机OS:Ubuntu16.04 4.三台虚拟机 5.JDK文件:jdk-8u201 ...
随机推荐
- open jdk 绿色版 下载
https://adoptopenjdk.net/ 是 rethat 的 openjdk 地址, jdk 11 , 进入页面后搜索 : jdk_x64_windo , 下载 zip 绿色版的那个. h ...
- Tomcat PUT方法任意写文件漏洞(CVE-2017-12615)
Apache Tomcat 7.0.0~7.0.79 直接发送以下数据包即可在Web根目录写入shell: PUT /1.jsp/ HTTP/1.1 Host: 192.168.49.2:8080 A ...
- JAVA集合类概览
带着问题来阅读 1.Java有哪些集合 2.不同集合的应用场景分别是哪些 3.哪些实现类是线程安全的 4.为什么Java集合不能存放基本类型 5.集合的fail-fast和fail-safe是什么 J ...
- Spring Cloud Gateway自定义异常处理Exception Handler
版本: Spring Cloud 2020.0.3 常见的方法有 实现自己的 DefaultErrorWebExceptionHandler 或 仅实现ErrorAttributes. 方法1: Er ...
- 迈入 8K 时代,AI 驱动超高清 “视” 界到来
2021 年,超高清迈入 "8K" 时代.超高清视频将带来全新视听体验,但超高清生产在内容生产层面也面临着超高清存量少.生产设备更新换代慢.制作周期成倍增加的困境.在 7 月 10 ...
- maze writeup
maze writeup 攻防世界的一道迷宫题,第一次接触这样的题,个人感觉很有意思,收获也挺多,做一篇笔记记录一下. 程序分析 __int64 sub_4006B0() { signed __int ...
- linux笔记1(不全,无图版)随笔
1.ls 查看当前目录下的所有内容 黑色的是文件,蓝色的是文件夹,也就是目录 2.rm -f anaconda-ks. cfg 彻底删除文件(如不确定,则需要先保存备份,也就是快照) 3.ifconf ...
- 四、C#简单操作MinIO
MinIO的官方网站非常详细,以下只是本人学习过程的整理 一.MinIO的基本概念 二.Windows安装与简单使用MinIO 三.Linux部署MinIO分布式集群 四.C#简单操作MinIO He ...
- Salesforce Integration 概览(七) Data Virtualization数据可视化
本篇参考:https://resources.docs.salesforce.com/sfdc/pdf/integration_patterns_and_practices.pdf Salesforc ...
- netty系列之:自定义编码和解码器要注意的问题
目录 简介 自定义编码器和解码器的实现 ReplayingDecoder 总结 简介 在之前的系列文章中,我们提到了netty中的channel只接受ByteBuf类型的对象,如果不是ByteBuf对 ...