R2CNN模型——用于文本目标检测的模型
引言
R2CNN全称Rotational Region CNN,是一个针对斜框文本检测的CNN模型,原型是Faster R-CNN,paper中的模型主要针对文本检测,调整后也可用于航拍图像的检测中去。在ICDAR数据集上进行benchmark。
相关工作
paper中介绍了很多相关的针对斜框类型的文本目标识别所使用的模型,例如TextBoxes(端到端的单个神经网络实现)、DeepText(使用Inception-RPN生成候选框,然后对每个候选框进行文本检测的打分:即判别其是否是文本的概率,我的看法是可能是Faster R-CNN在文本目标识别中的魔改,但没阅读过相关论文不下定论)、FCRN(全卷积回归网络利用合成图像训练模型)。以上的模型都是针对水平框的。
接着还介绍了几种其他实现思路的模型,如CTPN(检测固定宽度的垂直框,使用BLSTM捕捉顺序信息,然后链接垂直框以获得最终检测框)、FCN(使用text block FCN检测文本块,使用MSER检测多种朝向的文本候选,最后进行候选文本的分类)、RRPN(基于Faster R-CNN,使用倾斜角来描述多种朝向的候选框,这个在DOTA数据集那篇文章中有介绍具体的表达方法)、SegLink(通过检测段然后对段进行连接,在任意长度的文本检测中这种模型表现很好)、EAST(加快检测速度)、DMPNet(用于生成更加贴合的文本框)、Deep direct regression(用于多种朝向的文本检测)。
作者模型的目标是检测出任意朝向的文本,类似于RRPN的目标,但实现思路有所不同。(作者认为RPN在生成候选文本方面表现很好,所以模型的设计思路是基于RPN生成的候选文本信息来生成文本候选框,而不是类似原始的Faster R-CNN将两个目标分离开来)。
问题描述
有趣的是,本文作者使用了一种不同于\((x_1, y_1, x_2, y_2, x_3, y_3, x_4, y_4)\)和\((x_1, y_1, x_2, y_2, \theta)\)的候选框表达方式,而是使用了\((x_1, y_1, x_2, y_2, h)\)。
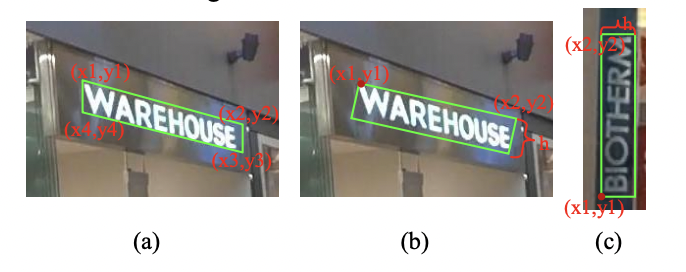
其中四个点的表达方式所表达出来的框当然是最精确的,但是四个点的回归使得任务很难。而使用\(\theta\)角的表达方式会出现\(90^0\)和\(-90^0\)的歧义问题。所以作者使用了第三种表达方式:首先选定初始点,然后选定其顺时针方向的下一个点,最后使用矩形的高度来表达出候选框,这种方法也能达到不错的效果。
模型方法
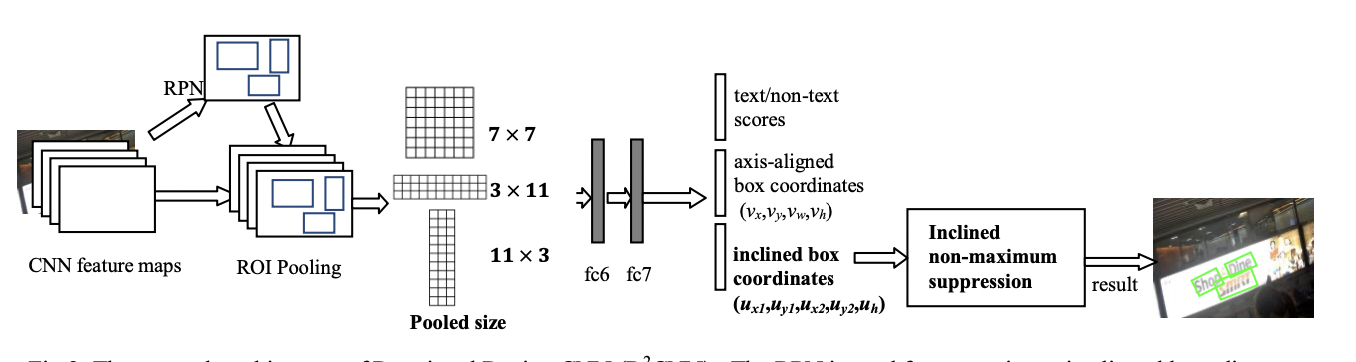
R2CNN模型的略图如下所示,RPN用于生成文本候选框(这时的候选框是水平的),然后对于每一个候选框,经过ROI池化层生成三种大小的特征图(7X7、11X3、3X11),经过两个全连接层生成最终的结果(三种结果:文本和非文本的得分情况、水平框预测和斜框预测),然后使用NMS算法得到最后的结果。
RPN
使用RPN生成水平预测框是合理的。因为总是有一些物体本身就是水平的或者竖直的,再或者可以被证明使用水平框识别它是很好的选择(原论文中的说法)。而且由于较小的文本场景更多,所以R2CNN将Faster R-CNN中的RPN设定的三种anchor的尺寸增加了一种,即将(8,16,32)改为(4,8,16,32)。
多尺度的ROIPoolings
从Faster R-CNN的7X7尺寸特征图,改为了三种尺寸(7X7,11X3,3X11)。其中3X11用于检测纵横比更大的文本类型,11X3用于检测纵横比更小的文本类型。
结果预测
文本检测是一个多任务模型,最后生成的三种结果:text/non-text scores, axis-aligned boxes and inclined minimum area boxes。
之所以要加入水平框的预测结果,是因为理想和实际实验中证明加入水平框的预测损失可以改善模型的性能。(考虑这一点是因为水平框和最终要预测的斜框是有一定关系的,可以作为斜框的一种强特征来看)。
NMS(非最大抑制)
通过NMS对水平框和斜框进行最后的筛选,最后得出的一个结果如下图所示。可以看出斜框在这种场景下相比水平框有很大的优势。
损失计算
paper中的损失计算公式如下:
\[L(p,t,v,v^*,u,u^*) = L_{cls}(p,t) +
\lambda_1t\sum_{i\in{x,y,w,h}}L_{reg}(v_i, v_{i}^{*}) + \lambda_2t\sum_{i\in{x,y,w,h}}L_{reg}(u_i, u_{i}^{*})
\]其中第一项就是判别是否为文本的损失,输出类别只有两种(是否为文本),第二项为水平框的回归损失,第三项为斜框的回归损失。\(\lambda_1\)和\(\lambda_2\)为可调整的系数,用以控制各部分损失之间的比例关系。
其中对于候选框的两部分损失的计算,均采用SmoothL1的方式。即:
\[L_{reg}(w, w^*) = smooth_{L1}(w - w^*)\\
smooth_{L1}(x) = \left\{
\begin{aligned}
0.5x^2 \qquad if\quad|x| < 1\\
|x| - 0.5\qquad otherwise
\end{aligned}
\right.
\]
实验部分
实现细节
- 训练数据包括2000张聚焦场景文本图像和1000张附带场景文本图像,选用训练数据时仅仅选用了容易识别的数据样本,即不包括识别不出来具体文本内容或识别为”XXX“的数据。
- 训练数据时将每个数据进行旋转以得到单张图像的多个输入样例,实验中采用了13中旋转角(-90, -75, -60, -45, -30, -15, 0, 15, 30, 45, 60, 75, 90),共计39000张图像。
- 训练细节:共进行20w次迭代,学习率在迭代期间动态调整(每经过5w次迭代就将学习率翻倍)。正则化项设置为0.0005, momentums设置为0.9。输入图像的尺寸为:高720、宽1280。
性能表现
实验中使用了精确率、召回率、F-score和时间作为模型的评估量。
通过对比基线模型Faster R-CNN以及调整自己模型的几个超参数,来对比模型之间的效果。其中在ICDAR 2015数据集上的效果对比如下图所示:
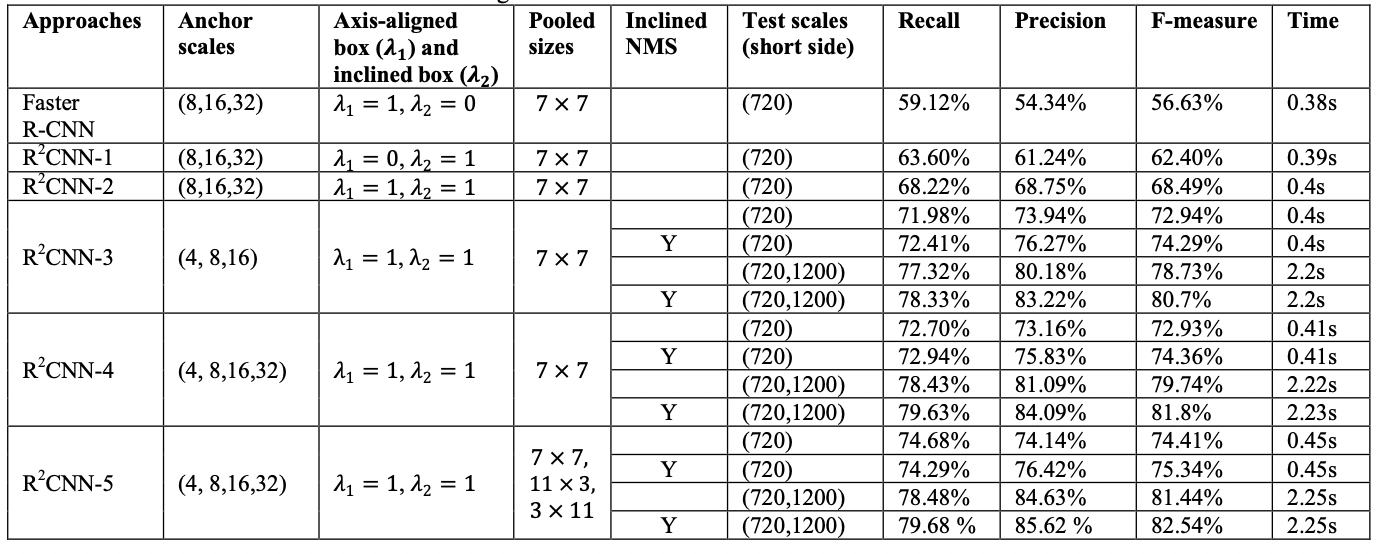
从表中可以看出,其中调整的超参数包括候选框大小(Anchor scales)、候选框的损失的比例系数(Axis-aligned box and incline box)、池化后的大小(Pooled sizes)、是否使用斜框NMS(Inclined NMS)、测试图的最短边大小范围(Test scales)
与其他模型之间的对比
在ICDAR 2015上达到了SOTA,在ICDAR 2013上与CTPN不相上下。
模型可以扩展用于YOLO和SSD
R2CNN模型——用于文本目标检测的模型的更多相关文章
- 大话目标检测经典模型(RCNN、Fast RCNN、Faster RCNN)
目标检测是深度学习的一个重要应用,就是在图片中要将里面的物体识别出来,并标出物体的位置,一般需要经过两个步骤:1.分类,识别物体是什么 2.定位,找出物体在哪里 除了对单个物体进行检测,还要能支持 ...
- tensorflow C++接口调用目标检测pb模型代码
#include <iostream> #include "tensorflow/cc/ops/const_op.h" #include "tensorflo ...
- (二)目标检测算法之R-CNN
系列博客链接: (一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html 概述: 1.目标检测-Overfeat模型 2.目标检测-R-C ...
- 第三十二节,使用谷歌Object Detection API进行目标检测、训练新的模型(使用VOC 2012数据集)
前面已经介绍了几种经典的目标检测算法,光学习理论不实践的效果并不大,这里我们使用谷歌的开源框架来实现目标检测.至于为什么不去自己实现呢?主要是因为自己实现比较麻烦,而且调参比较麻烦,我们直接利用别人的 ...
- 目标检测-基于Pytorch实现Yolov3(1)- 搭建模型
原文地址:https://www.cnblogs.com/jacklu/p/9853599.html 本人前段时间在T厂做了目标检测的项目,对一些目标检测框架也有了一定理解.其中Yolov3速度非常快 ...
- 评价目标检测(object detection)模型的参数:IOU,AP,mAP
首先我们为什么要使用这些呢? 举个简单的例子,假设我们图像里面只有1个目标,但是定位出来10个框,1个正确的,9个错误的,那么你要按(识别出来的正确的目标/总的正确目标)来算,正确率100%,但是其实 ...
- CVPR2020:利用图像投票增强点云中的三维目标检测(ImVoteNet)
CVPR2020:利用图像投票增强点云中的三维目标检测(ImVoteNet) ImVoteNet: Boosting 3D Object Detection in Point Clouds With ...
- 目标检测--Rich feature hierarchies for accurate object detection and semantic segmentation(CVPR 2014)
Rich feature hierarchies for accurate object detection and semantic segmentation 作者: Ross Girshick J ...
- 目标检测之YOLO V2 V3
YOLO V2 YOLO V2是在YOLO的基础上,融合了其他一些网络结构的特性(比如:Faster R-CNN的Anchor,GooLeNet的\(1\times1\)卷积核等),进行的升级.其目的 ...
随机推荐
- Maven还停留在导jar包?快来探索Nexus私服的新世界
写在前面 Maven,学习框架之前我们都会接触到的一个工具,感觉他的定位,似乎就跟git一样,只是方便我们开发?于是自然而然的,很多小猿对于Maven都只是停留在会用的阶段,利用他来构建,打包,引入j ...
- 万能构造解决Rolle中值问题
只要原函数是两个函数的乘积形式,皆可此构造.
- 替换空格 牛客网 剑指Offer
替换空格 牛客网 剑指Offer 题目描述 请实现一个函数,将一个字符串中的每个空格替换成"%20".例如,当字符串为We Are Happy.则经过替换之后的字符串为We%20A ...
- Linux下向windows传输文件【sz 文件】没有弹框提示下载到什么位置
Linux环境向windows环境传输文件 security crt工具,同同一个软件,连接不同服务器,有的服务器传送文件没有弹框选择要下载的文件路径,可以在[Options]-[Session Op ...
- java随手记 面向对象
// 可以把两个类放在同一个文件中,但文件中只能有一个类是公共类,且公共类必须与文件同名,即xxx.java,源代码中的每个类编译成class文件 // java库中的类 // java.util.* ...
- dart系列之:dart语言中的变量
目录 简介 dart中的变量 定义变量 变量的默认值 Late变量 常量 总结 简介 flutter是google在2015年dart开发者峰会上推出的一种开源的移动UI构建框架,使用flutter可 ...
- HTML基本使用
HTML初识 (Hyper Text Markup Language): 超文本标记语言 「HTML骨架格式」 <!-- 页面中最大的标签 根标签 --> <html> < ...
- redis 内存划分
1.数据:作为数据库,数据是最主要的部分,这部分占用的内存会被统计在used_memory中 2.进程内存:redis主进程本身运行需要占用的内存,这部分内存会被统计在used_memory_rss中 ...
- 9组-Alpha冲刺-2/6
一.基本情况 队名:不行就摆了吧 组长博客:https://www.cnblogs.com/Microsoft-hc/p/15534079.html 小组人数: 8 二.冲刺概况汇报 谢小龙 过去两天 ...
- go 错误处理设计思考
前段时间准备对线上一个golang系统服务进行内部开源,对代码里面的错误处理进行了一波优化. 优化的几个原因: 错误处理信息随意,未分类未定义.看到错误日志不能第一时间定位 错误的日志重复,有时候一个 ...