Boost 矩形布尔运算
本文主要介绍boost库中矩形布尔运算的思路和代码解析。在此感谢Intel对开源事业的贡献。
基本概念
图形的插入
所有的操作的第一步都是进行图形的插入,我们需要声明定义好我们要使用的图形类型,以矩形为例,方式为:
rectangle_data(T xl, T yl, T xh, T yh)
实例如下:
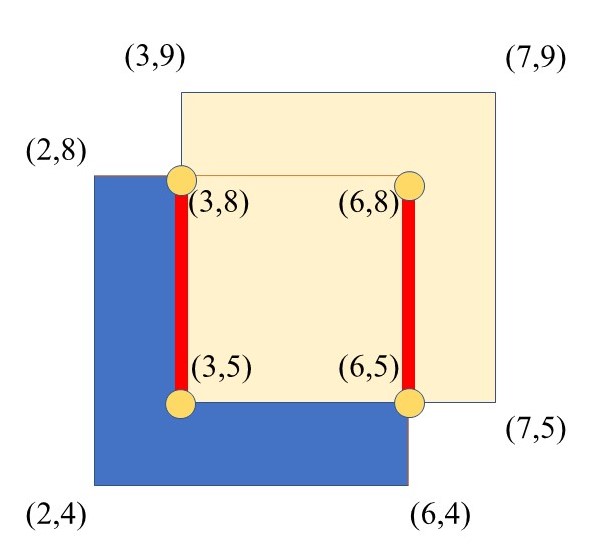
ps1.insert(rectangle_data<int>(3,5,7,9));
ps2.insert(rectangle_data<int>(2,4,6,8));
xl, yl, xh, yh分别为x最小值,y最小值,x最大值,y最大值。分别为矩形的右下角左边和左上角坐标。
顶点与多边形的转化——微分
在Boost算法中,一个基本的实现逻辑是通过计算多边形的导数来代表多边形的x和y坐标点变化
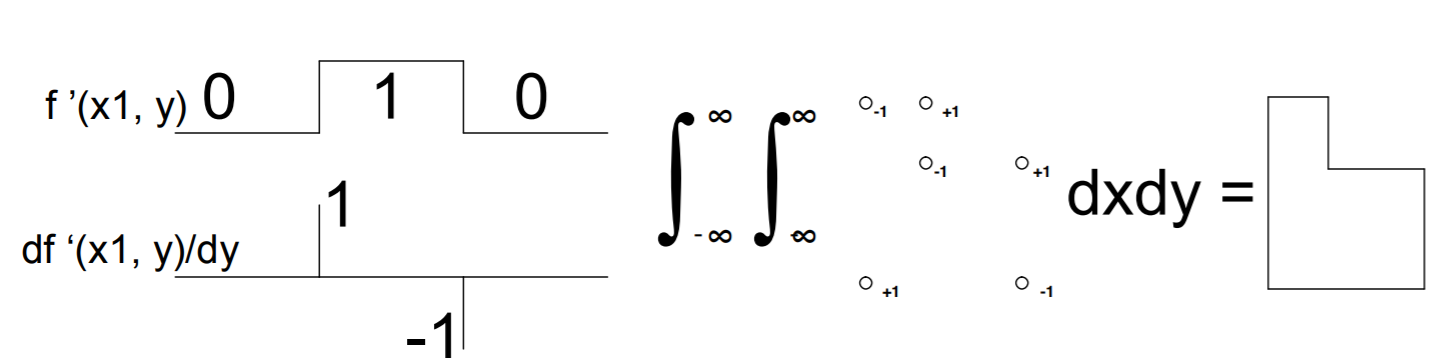
在对矩形的端点进行导数计算后,从左到右扫描所有矩形的点y坐标形成的竖直区间,对于矩形,竖直区间导数值等于下端点的导数值。 在代码实现上,boost并不真的求导,而只是按顺序分配,给四个顶点以1和-1的值,以加快运行速度。
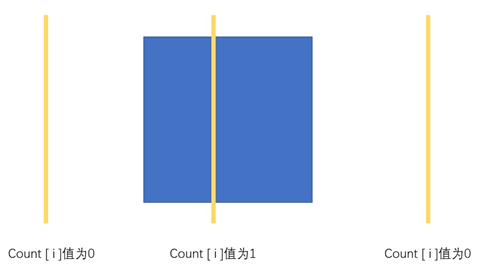
从左到右扫描所有矩形的点形成的区间,累加导数值,记录为count,来判断是否应该将该区间加入结果中。
假设有n个矩形进行布尔运算,那么设立一个长度为n的数组count,count[i]代表第i个矩形。布尔运算完成之后的图形设为 Result。扫描的方式是从左到右进行扫描。
计算加入区间ivl前总体状态值before和加入ivl之后after。对于不同的布尔运算,总体状态值的计算方式也不一致。
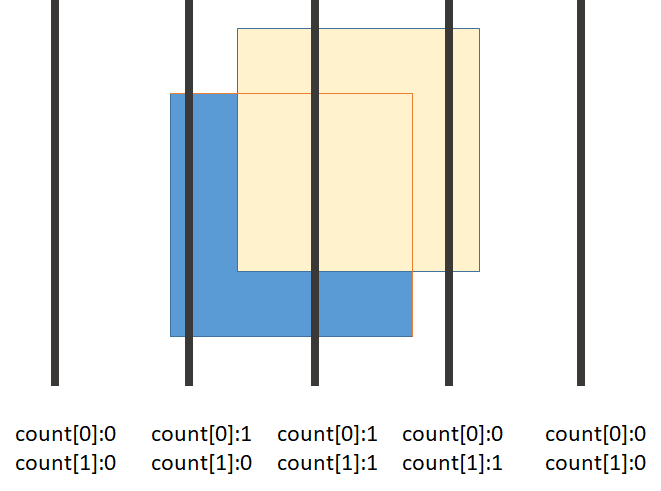
1.对于或运算,从count[0]和count[1]任一值为1,就能计算出当前总体状态值为true。
2.对于与运算,就需要从count[0]和count[1]所有值全为1,才能计算出当前总体状态值为true。
总体状态值before或after等于true,那么代表位于Result内部。
等于false自然代表位于Result外部。
显然对于一个区间,加入他前后如果都在Result内部,或者都在Result外部,这个区间就不是Result的边。反之,如果由内到外或者由外到内,这个区间就是Result的边,应该加入结果中。
布尔运算代码详解
首先声明矩形,方式为
rectangle_data(T xl, T yl, T xh, T yh)
xl, yl, xh, yh分别为x最小值,y最小值,x最大值,y最大值。
定义三个矩形集合ps1, ps2和ps_tmp。
ps1内包含一个值为(3,5,7,9)的矩形, ps2包含一个值为(2,4,6,8)的矩形,ps_tmp保存结果。
做布尔与运算
ps_tmp=ps1*ps2
通过重载操作符*的形式,进入布尔运算流程。
polygon_90_set_view<geometry_type_1, geometry_type_2, boolean_op::BinaryAnd>
(
lvalue,
rvalue,
polygon_90_set_traits<geometry_type_1>::orient(lvalue),
boolean_op::BinaryAnd()
);
lvalue即ps1, rvalue即ps2。
初始化
数据类型介绍:
interval_data:区间数据,用于扫描线。polygon中端点数据结构形如:
(first,(second.first,second.second))first存储端点的x值,second.first存储端点的y值,second.second存储端点的导数值。
有几个变量需要得到初始化:
orient:方向。每个 polygon_90_set_data 都有,默认为1.data_:保存着端点的数据。
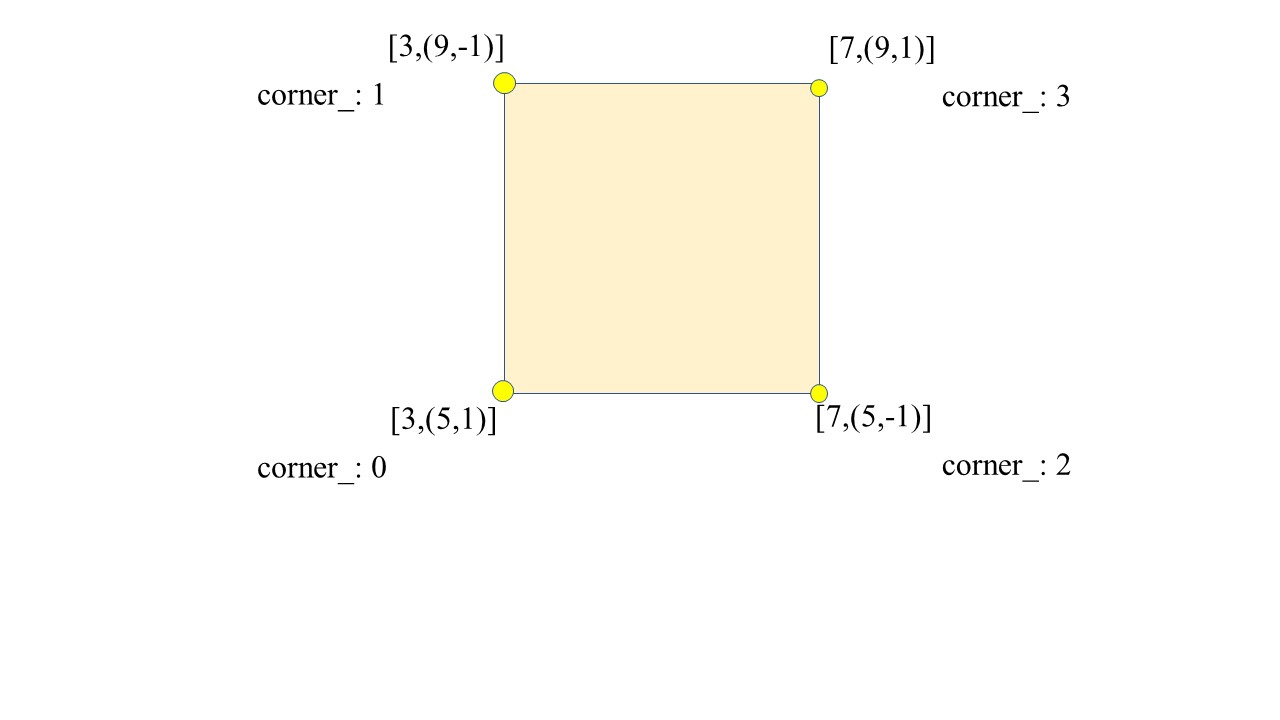
data_的初始化在insert时就已经完成,首先默认如下图所示。标记各个顶点,标记名为corner_,值为0,1,2,3(矩形条件下)。按照0,1,2,3的顺序依次标记各个点的导数值为1,-1,-1,1。需要注意的是在有hole的情况下,导数值会发生变化。具体执行函数位于iterator_geometry_to_set.hpp 52行 inline reference operator*()处。
compute_90_set_value
计算首先在名为 compute_90_set_value 的结构体中进行。将ps1,ps2分别作为lvalue_和rvalue_传入。
假如ps1和ps2的orient(方向)相同,那么:
- 对ps1和ps2均进行端点sort。先按x坐标升序排序,若x坐标相同,再按y坐标升序排序。如下图所示,ps1排序后顶点顺序为(3,5),(3,9),(7,5),(7,9)。
调用
output_.applyBooleanBinaryOp
(
lvalue_.begin(), lvalue_.end(),
rvalue_.begin(), rvalue_.end(),
boolean_op::BinaryCount<op_type>()
);
进入applyBooleanBinaryOp函数。
applyBooleanBinaryOp
变量介绍:
itr1:迭代器。用于ps1遍历。itr2:迭代器。用于ps2遍历。output:布尔运算得到的结果。container: vector类型。保存着每次计算得到的结果。其中元素类型为
pair<interval_data<Unit>, int>curCoord:记录当前x值。curPosition:记录当前y值。curCount:curCount[0]记录当前区间的属于ps1的端点导数值,curCount[1]记录当前区间的属于ps2的端点导数值。prevCoord:前一个被处理的点的x值。prevPosition:前一个被处理的点的y值。count:累加所有已处理的区间的下端点的导数值。
遍历ps1和ps2中的所有点,当他们都未被遍历完时:
选择itr1和itr2之中x值更小的点。使curCoord为其x值,curPosition为对应的y值。curCoount=defaultCount。如果选择itr1,curCount[0]加上itr1的导数值。否则,curCount[1]加上itr2的count值。
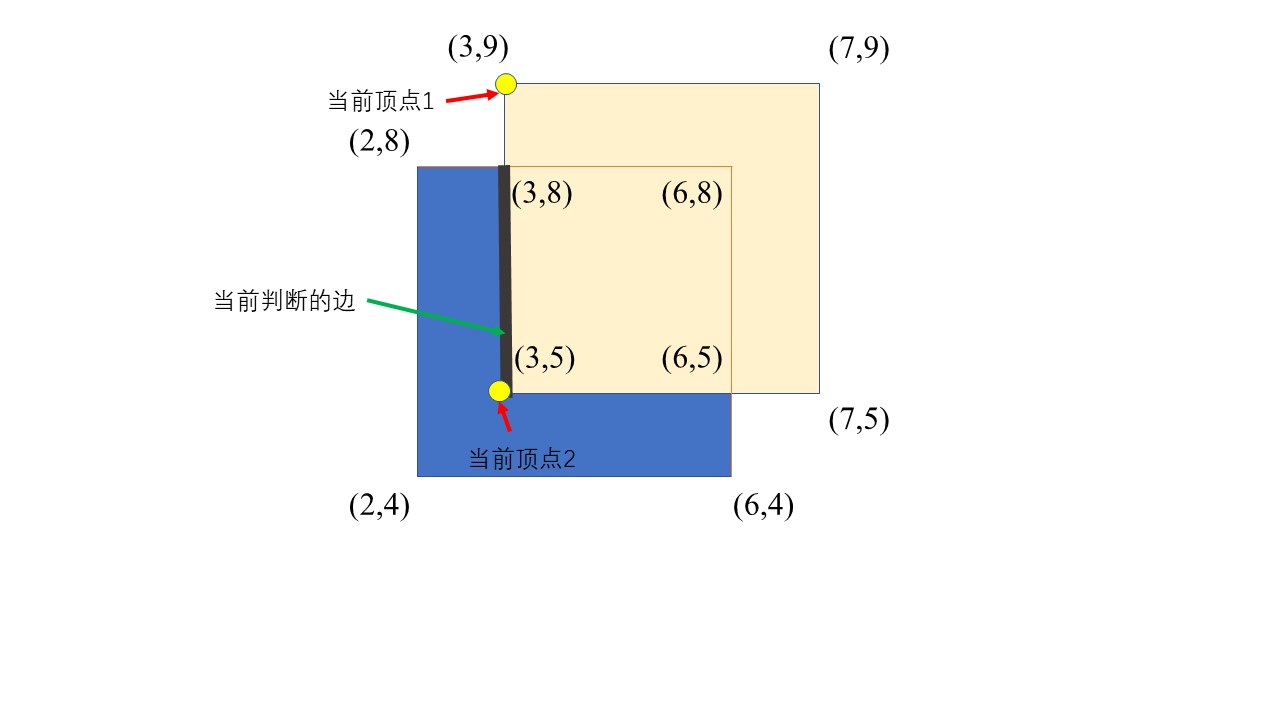
如果prevCoord!=curCoord。即两个端点的x值不一致,不能形成一条竖直方向的扫描线区间。不再进行后续处理,直接进行下次循环。调用advanceScan函数使scanData迭代器回到
scanData.begin(),并直接更新prevCoord,prevPosition,count。如下图所示,当前一点为(2,8),现端点为(3,5)时,二者不在同一竖直线上,不再进行后续处理。
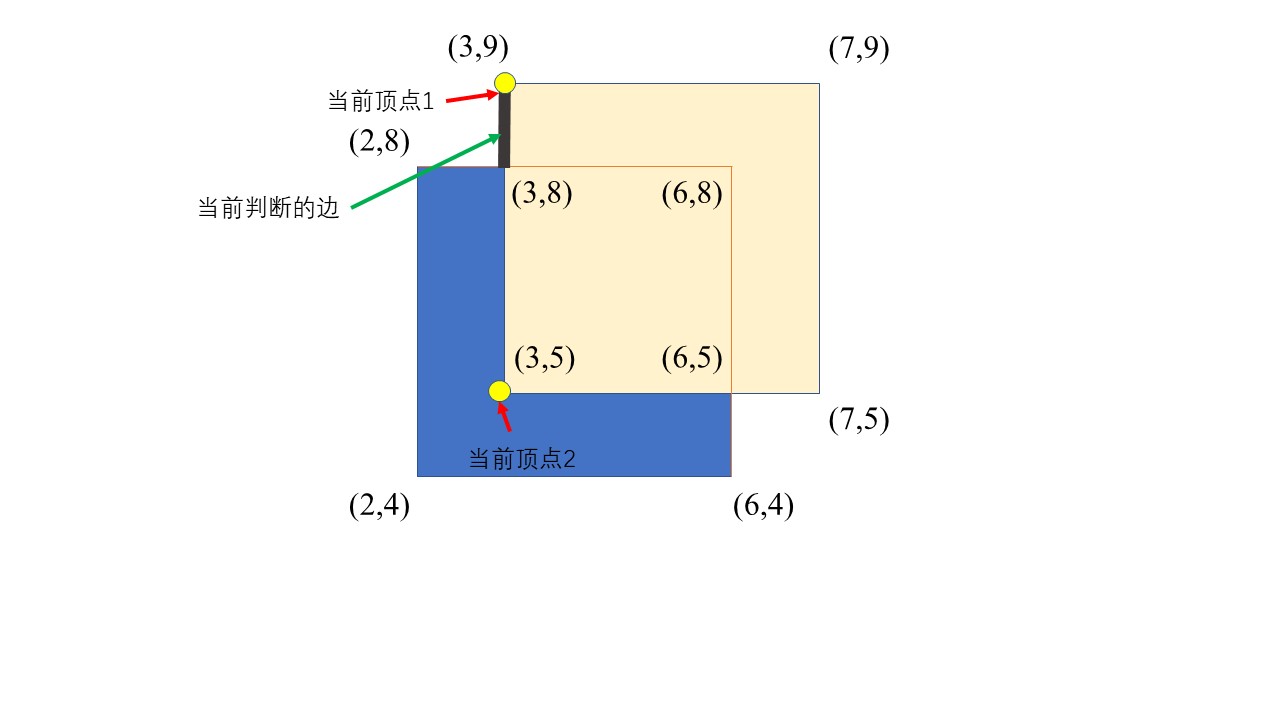
否则,继续处理。声明并定义变量ivl。ivl的下界为prevPosition,上界为curPosition。
清理container为空。
调用
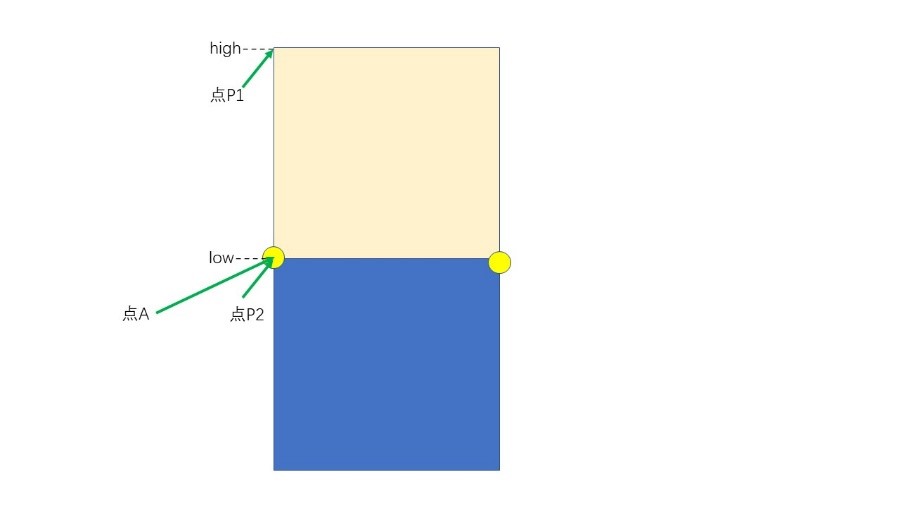
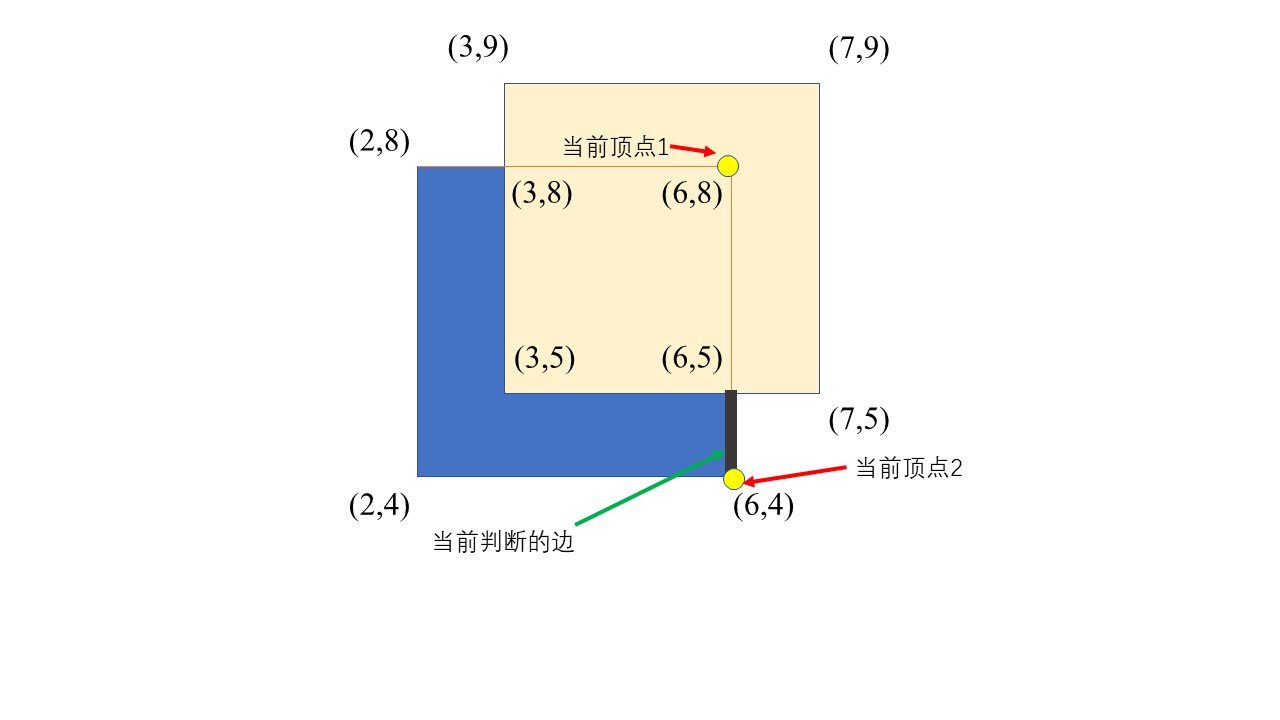
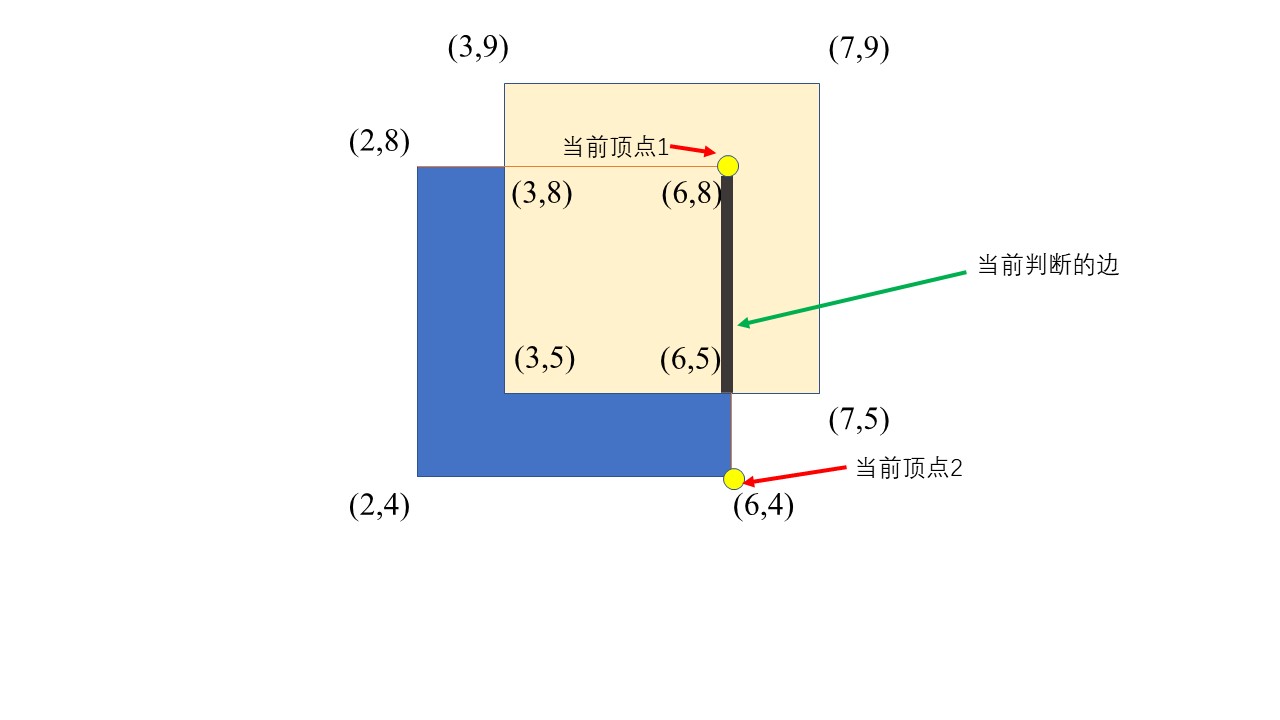
boolean.processInterval(container, ivl, count)进行区间的处理和计算,将结果加入container中。遍历container中所有interval元素,将prevCoord和元素的上界high联合成为新端点P1并加入output中。另外,当将prevCoord和元素的下界low联合成新端点P2,但若P2与output中最后一个端点A重合(如下图所示,点A与low重合),则将点A移除(为了合并区间),否则加入P2到output。
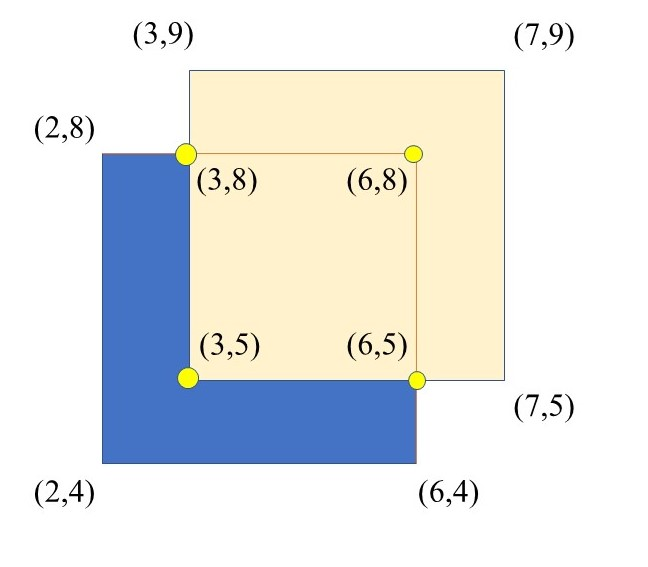
遍历结束,返回output,计算完毕。如下图所示,(3,5),(3,8),(6,5),(6,8)四个点就是布尔运算后的结果中所保存的点。
processInterval
processInterval函数用于计算结果。
变量介绍:
ivl:即输入变量interval,下界和上界分别为low和high。outputContainer:一个vector向量,用于保存结果interval。即输出。deltaCount:也就是count。累加所有已处理的区间的下端点的导数值。
具体来说:
- 对比当前interval与scacnData。如果当前interval覆盖到了scanData没有覆盖到的区域,根据当前interval扩展scanData。例如第一次进入processInterval时,将区间[4,8]传入。此时scanData 中没有数据,扩展scanData 。
- 在scanData中,由输入的ivl的下界low开始,到ivl的high结束。生成新interval,将新生成的interval输入到evaluateInterval进行判断,判断是否加入outputContainer中。
- 在evaluateInterval函数中,通过
以 ps1和ps2为例,流程如下
- 将区间[4,8]传入processInterval 。此时scanData 中没有数据,扩展scanData 。
判断[4,8]是否需要加入outputContainer中,判断结果为不需要。 - 将区间[5,9]传入。传入之前scanData为[4,8]。扩展,扩展后为[4,5,8,9]。
判断[5,8],[8,9]是否需要加入outputContainer中。[5,8]加入。 - 将区间[4,8]传入 。判断[4,5],[5,8]。[5,8]加入。
- 将区间[5,9]传入。判断[5,9]。不加入。
判断区间
判断区间在evaluateInterval中进行。
变量介绍:
1.ivl:区间interval。
2.beforeCount:代表scanData尚未加入ivl时的count值。保存了所有图形扫到的导数值之和。
3.afterCount:代表scanData加入ivl后的count值。保存了所有图形扫到的导数值之和。
假设有n个矩形进行布尔运算,那么设立一个长度为n的数组count,count[i]代表第i个矩形。布尔运算完成之后的图形设为 Result.
从左到右进行扫描,count值的变化情况如下:
0(尚未扫到该矩形) -----1(当前正在该矩形内部)-----0(离开该矩形)。
判断代码:
bool before = (int)beforeCount > 0;
bool after = (int)afterCount > 0;
int value = (!before & after) - (before & !after);
通过重载的方式,对于布尔运算进行不同的操作。
before和after即总体状态值,为true则代表在结果图形Result之内,否则代表在Result之外。
对于或运算的总体状态值,从count[0]和count[1]任一值为1,考虑到或运算需要将所有图形加入结果中,就代表当前总体状态值为true。
而对于与运算,就需要从count[0]和count[1]所有值全为1,才能判定位于结果图形之内,总体状态值为true。
当进行与运算时,代码如下:
bool before = (int)beforeCount > 0;
调用
inline operator int() const { return T()(counts_[0], counts_[1]); }
再调用
class BinaryAnd
{
public:
inline BinaryAnd() {}
inline bool operator()(int a, int b) { return (a > 0) & (b > 0); }
};
推广到其他布尔运算,则是:
class BinaryOr
{
... (int a, int b) { return (a > 0) | (b > 0); }
};
class BinaryNot
{
...(int a, int b) { return (a > 0) & !(b > 0); }
};
class BinaryXor
{
...(int a, int b) { return (a > 0) ^ (b > 0); }
};
通过模板和重载的方式实现对于不同的布尔运算类型实现不同的before和after取值方法。
计算完before和after的值后,计算value值。value值为1即为入边,为-1即为出边,这两种情况都需要加入outputContainer中。其他情况则不需要。
例如当第一次扫到(2,4),(2,8)边时,判断interavl[4,8]:

beforeCount:0,0------>before=false;
afterCount: 0,1------>after=false;
得出value:0
因此不加入。
扫到(3,5),(3,9)边时,判断interval[5,8]和[5,9]:
对于[5,8]
beforeCount:0,1------>before=false;
afterCount: 1,1------>after=true;
得出value:1
因此作为入边加入。
对于[8,9]
beforeCount:0,0------>before=false;
afterCount: 1,0------>after=false;
得出value:0
扫到(4,4),(4,8)边时,判断interval[4,5]和[5,8]:
对于[4,5]
beforeCount:0,1------>before=false;
afterCount: 0,0------>after=false;
得出value:0
对于[5,8]
beforeCount:1,1------>before=true;
afterCount: 1,0------>after=false;
得出value:-1
作为出边加入。
扫到(7,5),(7,9)边时,判断interval[5,9]:

对于[5,9]
beforeCount:1,0------>before=false;
afterCount: 0,0------>after=false;
得出value:0
最后两个interval判断通过。需要注意的是,虽然都是[5,8]区间,但后续5,8会分别与prevCoord(x坐标)联合形成端点坐标。
体现在结果里就是(3,5),(3,8),(6,5),(6,8)四个端点。
参考资料:
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/index.htm
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/GTL_boostcon2009.pdf
https://www.boost.org/doc/libs/1_75_0/libs/polygon/doc/GTL_boostcon_draft03.pdf
Boost 矩形布尔运算的更多相关文章
- matlab练习程序(最小包围矩形)
又是计算几何,我感觉最近对计算几何上瘾了. 当然,工作上也会用一些,不过工作上一般直接调用boost的geometry库. 上次写过最小包围圆,这次是最小包围矩形,要比最小包围圆复杂些. 最小包围矩形 ...
- [Boost::Polygon]多边形相减得到新的多边形序列
#include <iostream> #include <boost/polygon/polygon.hpp> #include <cassert> namesp ...
- [Boost]图形处理库Boost::Polygon
Background 工作中经师傅指导学习应用到了Boost::Polygon这个库,相对于Boost::Geometry,Polygon出自Intel.抽象于芯片流程,于是更贴近于芯片设计流程应用. ...
- Ps矩形工具的运用
矩形工具 1.标识位置以及快捷键 位于左侧工具栏中,快键键是u,根据需求选择里面包含的工具 2.使用方法 鼠标左键点击工具,直接在图层使用,点击后拖住不放选择想要的图形后松手即可. 可以根据自身的需求 ...
- boost强分类器的实现
boost.cpp文件下: bool CvCascadeBoost::train( const CvFeatureEvaluator* _featureEvaluator, int _numSampl ...
- [BOT] 一种android中实现“圆角矩形”的方法
内容简介 文章介绍ImageView(方法也可以应用到其它View)圆角矩形(包括圆形)的一种实现方式,四个角可以分别指定为圆角.思路是利用"Xfermode + Path"来进行 ...
- C语言 · 矩形面积交
问题描述 平面上有两个矩形,它们的边平行于直角坐标系的X轴或Y轴.对于每个矩形,我们给出它的一对相对顶点的坐标,请你编程算出两个矩形的交的面积. 输入格式 输入仅包含两行,每行描述一个矩形. 在每行中 ...
- Boost信号/槽signals2
信号槽是Qt框架中一个重要的部分,主要用来解耦一组互相协作的类,使用起来非常方便.项目中有同事引入了第三方的信号槽机制,其实Boost本身就有信号/槽,而且Boost的模块相对来说更稳定. signa ...
- canvas快速绘制圆形、三角形、矩形、多边形
想看前面整理的canvas常用API的同学可以点下面: canvas学习之API整理笔记(一) canvas学习之API整理笔记(二) 本系列文章涉及的所有代码都将上传至:项目代码github地址,喜 ...
随机推荐
- Mybatis-Plus03 代码自动生成器
先看完Mybatis-Plus01和Mybatis-Plus02再看Mybatis-Plus03 AutoGenerator 是 MyBatis-Plus 的代码生成器,通过 AutoGenerato ...
- 一球从100米高度自由落下,每次落地后反跳回原高度的一半;再落下,求它在第n次落地时,共经过多少米?第n次反弹多高?(n<=10)
单纯考逻辑 题目: 一球从100米高度自由落下,每次落地后反跳回原高度的一半:再落下,求它在第n次落地时,共经过多少米?第n次反弹多高?(n<=10) 输入描述: 一行,一个整数n (1< ...
- Schema的快速入门
Schema的快速入门 如果是简单元素直接 <element name="" type=""></element> Schema开发过 ...
- [源码解析] 并行分布式任务队列 Celery 之 EventDispatcher & Event 组件
[源码解析] 并行分布式任务队列 Celery 之 EventDispatcher & Event 组件 目录 [源码解析] 并行分布式任务队列 Celery 之 EventDispatche ...
- 视频格式mkv、mp4、avi、flv、mov、wmv、webm特点和区别
mkv是一种多媒体封装格式,这个封装格式可把多种不同编码的影像及 16 条或以上不同格式的音频和语言不同的字幕封装到一个 Matroska Media 档内. 它也是其中一种开放原始码的多媒体封装格式 ...
- 检查dtd和Xschema文件限制下的xml文件是否符合的Java文件
先来xml文件: 1 <?xml version="1.0" encoding="utf-8"?> 2 <!DOCTYPE orders SY ...
- 用 edgeadm 一键安装边缘 K8s 集群和原生 K8s 集群
背景 目前,很多边缘计算容器开源项目在使用上均存在一个默认的前提:用户需要提前准备一个标准的或者特定工具搭建的 Kubernetes 集群,然后再通过特定工具或者其他方式在集群中部署相应组件来体验边缘 ...
- repo sync error: .repo/manifests/: contains uncommitted changes
andorid 源码库同步,报错如标题,好几次想放弃,尝试了网上不少办法,无效, 最终从 stackoverflow 得到答案: After issued repo sync, I got a err ...
- java集合-哈希表HashTable
一.简介 HashTable也是一种key-value结构,key-value不允许null,并且这个类的几乎全部的方法都加上了synchronized锁,来保证并发安全,由于加了锁所以性能方面会比较 ...
- 【BIGDATA】ElasticSearch HEAD插件的GET请求的坑
今使用HEAD插件,发现复杂查询功能下,使用GET请求有坑. 查询语句如下: GET kk/_search { "query": { "match": { &q ...