使用帅气的cordic算法进行坐标系互转及log10的求解
参考博客
https://blog.csdn.net/u010712012/article/details/77755567
https://blog.csdn.net/Reborn_Lee/article/details/87436090
参考论文
基于FPGA的自然对数变换器的设计与实现.pdf
前言
众所周知,verilog并不能直接计算cos sin,但信号处理中却可能用到cos sin等函数的求解问题。
一种足够好的逼近方式为cordic。无需使用乘法操作,只是简单的加减移位操作即可,这就可以很好的使用verilog操作啦。
cordic算法有旋转模式和向量模式两种,分别可在圆坐标系、线性坐标系、双曲坐标系中使用。
在旋转模式中,通过使Z逼近0,得到x,y。
在向量模式中,通过使y逼近0,得到x,z。
线性坐标系暂时没有用到。
通过给定不同的初值,则可以求解不同的函数。
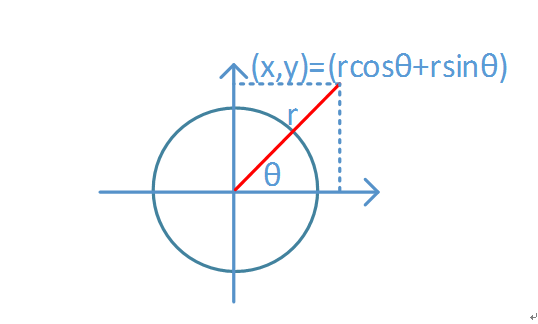
极坐标转直角坐标
已知(z,r),z表示角度,r表示极径。则可以通过旋转模式求解cos,sin。再乘r则得到实际上的直角坐标系(x,y)。
算法流程:本次迭代次数为16次,其他次数照着迭代公式写即可,为方便fpga内部计算,数值均放大成整数,角度均放大了2^16次,则计算出来的最终结果也应相应除以2^16次。
1、 设置迭代次数为16,则x0 = 0.607253,y0 = 0,并输入待计算的角度θ,θ在[-99.7°,99.7°]范围内。
2、 根据三个迭代公式进行迭代,i从0至15:
xi+1 = xi – d iy i2-i
yi+1 = yi + d ix i2-i
zi+1 = zi - diθi
注:z0 = θ,di与zi同符号。
3、 经过16次迭代计算后,得到的x16 和y16分别为cosθ和sinθ。
计算出的cos和sin再乘r即可得到相应的直角坐标系点(x,y)。
算法的本质即从45度开始旋转,直到z逼近0。而算法中的K本质上是个定值跟迭代次数有关,即∏cosθi。当迭代16次时,其值为

以下采用流水线对算法进行实现,可以获得最大的吞吐率。如果想节约资源,自然可以用复用串行迭代。
原始cordic可以处理的角度范围为[-99.7°,99.7°],要想放大输入角度范围覆盖[-pi,pi],则需要前处理和后处理,使得角度处于第1和第4象限。
仿真结果如下所示:
角度输入为33度,则结果为:cos:54959/2^16=0.838607788085938 ,sin:35697/2^16= 0.544692993164063
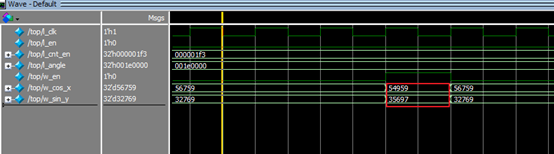
而matlab结果为:cos: 0.838670567945424 , sin: 0.544639035015027
可以看到误差极小。
代码仅供参考,勿做商业用途。
`timescale 1ns/1ps
module cos_sin_cordic (
input i_clk ,
input i_en ,
input signed [:] i_angle ,
output o_en ,
output o_error ,
output [:] o_cos_x ,
output [:] o_sin_y
);
////parameter
parameter p_angle_0 = , //45°放大2^16
p_angle_1 = ,
p_angle_2 = ,
p_angle_3 = ,
p_angle_4 = ,
p_angle_5 = ,
p_angle_6 = ,
p_angle_7 = ,
p_angle_8 = ,
p_angle_9 = ,
p_angle_10 = ,
p_angle_11 = ,
p_angle_12 = ,
p_angle_13 = ,
p_angle_14 = ,
p_angle_15 = ;
parameter p_x_initial = ; //0.6072529351放大了2^16次
parameter p_angle_p90 = 'sd5898240, //90度放大2^16次
p_angle_n90 = -'sd5898240, //-90度
p_angle_p180 = 'sd11796480, //180
p_angle_n180 = -'sd11796480, //-180
p_angle_p0 = 'sd0;
//角度象限判定 角度范围为[-pi,pi]
////象限标识
//00: 第4象限
//01:第1象限
//10:第2象限
//11:第3象限
reg [:] r_angle = 'd0;
reg [:] r_quadrant_flag = 'b00;
reg r_error = 'b0; //角度范围输入错误
always @(posedge i_clk)
begin
if ((i_angle < p_angle_n180) || (i_angle > p_angle_p180)) //越界报错
r_error <= 'b1;
else
r_error <= 'b0;
end
always @(posedge i_clk) //角度象限判定
begin
if ((i_angle >= p_angle_p0) && (i_angle <= p_angle_p90)) //第1象限
begin
r_angle <= i_angle;
r_quadrant_flag <= 'b01;
end
else if (i_angle > p_angle_p90) //第2象限
begin
r_angle <= i_angle - p_angle_p90;
r_quadrant_flag <= 'b10;
end
else if ((i_angle < p_angle_p0) && (i_angle >= p_angle_n90)) //第4象限
begin
r_angle <= i_angle;
r_quadrant_flag <= 'b00;
end
else //第3象限
begin
r_angle <= i_angle - p_angle_n90;
r_quadrant_flag <= 'b11;
end
end //赋初始值
reg [:] r_x_0 = 'd0;
reg [:] r_y_0 = 'd0;
reg [:] r_angle_remain_0 = 'd0;
always @(posedge i_clk)
begin
r_x_0 <= p_x_initial;
r_y_0 <= 'd0;
r_angle_remain_0 <= r_angle;
end
//第1次旋转
reg [:] r_x_1 = 'd0;
reg [:] r_y_1 = 'd0;
reg [:] r_angle_remain_1 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_0[]) //负数
begin
r_x_1 <= r_x_0 + r_y_0;
r_y_1 <= r_y_0 - r_x_0;
r_angle_remain_1 <= r_angle_remain_0 + p_angle_0;
end
else //角度为正
begin
r_x_1 <= r_x_0 - r_y_0;
r_y_1 <= r_y_0 + r_x_0;
r_angle_remain_1 <= r_angle_remain_0 - p_angle_0;
end
end
//第2次旋转
reg [:] r_x_2 = 'd0;
reg [:] r_y_2 = 'd0;
reg [:] r_angle_remain_2 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_1[]) //负数
begin
r_x_2 <= r_x_1 + {{{r_y_1[]}},r_y_1[:]};
r_y_2 <= r_y_1 - {{{r_x_1[]}},r_x_1[:]};
r_angle_remain_2 <= r_angle_remain_1 + p_angle_1;
end
else //角度为正
begin
r_x_2 <= r_x_1 - {{{r_y_1[]}},r_y_1[:]};
r_y_2 <= r_y_1 + {{{r_x_1[]}},r_x_1[:]};
r_angle_remain_2 <= r_angle_remain_1 - p_angle_1;
end
end
//第3次旋转
reg [:] r_x_3 = 'd0;
reg [:] r_y_3 = 'd0;
reg [:] r_angle_remain_3 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_2[]) //负数
begin
r_x_3 <= r_x_2 + {{{r_y_2[]}},r_y_2[:]};
r_y_3 <= r_y_2 - {{{r_x_2[]}},r_x_2[:]};
r_angle_remain_3 <= r_angle_remain_2 + p_angle_2;
end
else //角度为正
begin
r_x_3 <= r_x_2 - {{{r_y_2[]}},r_y_2[:]};
r_y_3 <= r_y_2 + {{{r_x_2[]}},r_x_2[:]};
r_angle_remain_3 <= r_angle_remain_2 - p_angle_2;
end
end
//第4次旋转
reg [:] r_x_4 = 'd0;
reg [:] r_y_4 = 'd0;
reg [:] r_angle_remain_4 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_3[]) //负数
begin
r_x_4 <= r_x_3 + {{{r_y_3[]}},r_y_3[:]};
r_y_4 <= r_y_3 - {{{r_x_3[]}},r_x_3[:]};
r_angle_remain_4 <= r_angle_remain_3 + p_angle_3;
end
else //角度为正
begin
r_x_4 <= r_x_3 - {{{r_y_3[]}},r_y_3[:]};
r_y_4 <= r_y_3 + {{{r_x_3[]}},r_x_3[:]};
r_angle_remain_4 <= r_angle_remain_3 - p_angle_3;
end
end
//第5次旋转
reg [:] r_x_5 = 'd0;
reg [:] r_y_5 = 'd0;
reg [:] r_angle_remain_5 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_4[]) //负数
begin
r_x_5 <= r_x_4 + {{{r_y_4[]}},r_y_4[:]};
r_y_5 <= r_y_4 - {{{r_x_4[]}},r_x_4[:]};
r_angle_remain_5 <= r_angle_remain_4 + p_angle_4;
end
else //角度为正
begin
r_x_5 <= r_x_4 - {{{r_y_4[]}},r_y_4[:]};
r_y_5 <= r_y_4 + {{{r_x_4[]}},r_x_4[:]};
r_angle_remain_5 <= r_angle_remain_4 - p_angle_4;
end
end
//第6次旋转
reg [:] r_x_6 = 'd0;
reg [:] r_y_6 = 'd0;
reg [:] r_angle_remain_6 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_5[]) //负数
begin
r_x_6 <= r_x_5 + {{{r_y_5[]}},r_y_5[:]};
r_y_6 <= r_y_5 - {{{r_x_5[]}},r_x_5[:]};
r_angle_remain_6 <= r_angle_remain_5 + p_angle_5;
end
else //角度为正
begin
r_x_6 <= r_x_5 - {{{r_y_5[]}},r_y_5[:]};
r_y_6 <= r_y_5 + {{{r_x_5[]}},r_x_5[:]};
r_angle_remain_6 <= r_angle_remain_5 - p_angle_5;
end
end
//第7次旋转
reg [:] r_x_7 = 'd0;
reg [:] r_y_7 = 'd0;
reg [:] r_angle_remain_7 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_6[]) //负数
begin
r_x_7 <= r_x_6 + {{{r_y_6[]}},r_y_6[:]};
r_y_7 <= r_y_6 - {{{r_x_6[]}},r_x_6[:]};
r_angle_remain_7 <= r_angle_remain_6 + p_angle_6;
end
else //角度为正
begin
r_x_7 <= r_x_6 - {{{r_y_6[]}},r_y_6[:]};
r_y_7 <= r_y_6 + {{{r_x_6[]}},r_x_6[:]};
r_angle_remain_7 <= r_angle_remain_6 - p_angle_6;
end
end
//第8次旋转
reg [:] r_x_8 = 'd0;
reg [:] r_y_8 = 'd0;
reg [:] r_angle_remain_8 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_7[]) //负数
begin
r_x_8 <= r_x_7 + {{{r_y_7[]}},r_y_7[:]};
r_y_8 <= r_y_7 - {{{r_x_7[]}},r_x_7[:]};
r_angle_remain_8 <= r_angle_remain_7 + p_angle_7;
end
else //角度为正
begin
r_x_8 <= r_x_7 - {{{r_y_7[]}},r_y_7[:]};
r_y_8 <= r_y_7 + {{{r_x_7[]}},r_x_7[:]};
r_angle_remain_8 <= r_angle_remain_7 - p_angle_7;
end
end
//第9次旋转
reg [:] r_x_9 = 'd0;
reg [:] r_y_9 = 'd0;
reg [:] r_angle_remain_9 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_8[]) //负数
begin
r_x_9 <= r_x_8 + {{{r_y_8[]}},r_y_8[:]};
r_y_9 <= r_y_8 - {{{r_x_8[]}},r_x_8[:]};
r_angle_remain_9 <= r_angle_remain_8 + p_angle_8;
end
else //角度为正
begin
r_x_9 <= r_x_8 - {{{r_y_8[]}},r_y_8[:]};
r_y_9 <= r_y_8 + {{{r_x_8[]}},r_x_8[:]};
r_angle_remain_9 <= r_angle_remain_8 - p_angle_8;
end
end
//第10次旋转
reg [:] r_x_10 = 'd0;
reg [:] r_y_10 = 'd0;
reg [:] r_angle_remain_10 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_9[]) //负数
begin
r_x_10 <= r_x_9 + {{{r_y_9[]}},r_y_9[:]};
r_y_10 <= r_y_9 - {{{r_x_9[]}},r_x_9[:]};
r_angle_remain_10 <= r_angle_remain_9 + p_angle_9;
end
else //角度为正
begin
r_x_10 <= r_x_9 - {{{r_y_9[]}},r_y_9[:]};
r_y_10 <= r_y_9 + {{{r_x_9[]}},r_x_9[:]};
r_angle_remain_10 <= r_angle_remain_9 - p_angle_9;
end
end
//第11次旋转
reg [:] r_x_11 = 'd0;
reg [:] r_y_11 = 'd0;
reg [:] r_angle_remain_11 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_10[]) //负数
begin
r_x_11 <= r_x_10 + {{{r_y_10[]}},r_y_10[:]};
r_y_11 <= r_y_10 - {{{r_x_10[]}},r_x_10[:]};
r_angle_remain_11 <= r_angle_remain_10 + p_angle_10;
end
else //角度为正
begin
r_x_11 <= r_x_10 - {{{r_y_10[]}},r_y_10[:]};
r_y_11 <= r_y_10 + {{{r_x_10[]}},r_x_10[:]};
r_angle_remain_11 <= r_angle_remain_10 - p_angle_10;
end
end
//第12次旋转
reg [:] r_x_12 = 'd0;
reg [:] r_y_12 = 'd0;
reg [:] r_angle_remain_12 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_11[]) //负数
begin
r_x_12 <= r_x_11 + {{{r_y_11[]}},r_y_11[:]};
r_y_12 <= r_y_11 - {{{r_x_11[]}},r_x_11[:]};
r_angle_remain_12 <= r_angle_remain_11 + p_angle_11;
end
else //角度为正
begin
r_x_12 <= r_x_11 - {{{r_y_11[]}},r_y_11[:]};
r_y_12 <= r_y_11 + {{{r_x_11[]}},r_x_11[:]};
r_angle_remain_12 <= r_angle_remain_11 - p_angle_11;
end
end
//第13次旋转
reg [:] r_x_13 = 'd0;
reg [:] r_y_13 = 'd0;
reg [:] r_angle_remain_13 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_12[]) //负数
begin
r_x_13 <= r_x_12 + {{{r_y_12[]}},r_y_12[:]};
r_y_13 <= r_y_12 - {{{r_x_12[]}},r_x_12[:]};
r_angle_remain_13 <= r_angle_remain_12 + p_angle_12;
end
else //角度为正
begin
r_x_13 <= r_x_12 - {{{r_y_12[]}},r_y_12[:]};
r_y_13 <= r_y_12 + {{{r_x_12[]}},r_x_12[:]};
r_angle_remain_13 <= r_angle_remain_12 - p_angle_12;
end
end
//第14次旋转
reg [:] r_x_14 = 'd0;
reg [:] r_y_14 = 'd0;
reg [:] r_angle_remain_14 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_13[]) //负数
begin
r_x_14 <= r_x_13 + {{{r_y_13[]}},r_y_13[:]};
r_y_14 <= r_y_13 - {{{r_x_13[]}},r_x_13[:]};
r_angle_remain_14 <= r_angle_remain_13 + p_angle_13;
end
else //角度为正
begin
r_x_14 <= r_x_13 - {{{r_y_13[]}},r_y_13[:]};
r_y_14 <= r_y_13 + {{{r_x_13[]}},r_x_13[:]};
r_angle_remain_14 <= r_angle_remain_13 - p_angle_13;
end
end
//第15次旋转
reg [:] r_x_15 = 'd0;
reg [:] r_y_15 = 'd0;
reg [:] r_angle_remain_15 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_14[]) //负数
begin
r_x_15 <= r_x_14 + {{{r_y_14[]}},r_y_14[:]};
r_y_15 <= r_y_14 - {{{r_x_14[]}},r_x_14[:]};
r_angle_remain_15 <= r_angle_remain_14 + p_angle_14;
end
else //角度为正
begin
r_x_15 <= r_x_14 - {{{r_y_14[]}},r_y_14[:]};
r_y_15 <= r_y_14 + {{{r_x_14[]}},r_x_14[:]};
r_angle_remain_15 <= r_angle_remain_14 - p_angle_14;
end
end
//第16次旋转
reg [:] r_x_16 = 'd0;
reg [:] r_y_16 = 'd0;
reg [:] r_angle_remain_16 = 'd0;
always @(posedge i_clk)
begin
if (r_angle_remain_15[]) //负数
begin
r_x_16 <= r_x_15 + {{{r_y_15[]}},r_y_15[:]};
r_y_16 <= r_y_15 - {{{r_x_15[]}},r_x_15[:]};
r_angle_remain_16 <= r_angle_remain_15 + p_angle_15;
end
else //角度为正
begin
r_x_16 <= r_x_15 - {{{r_y_15[]}},r_y_15[:]};
r_y_16 <= r_y_15 + {{{r_x_15[]}},r_x_15[:]};
r_angle_remain_16 <= r_angle_remain_15 - p_angle_15;
end
end
//计算结果转化为真实结果
//flag延迟16+1+1
reg [:] r_cos_x;
reg [:] r_sin_y;
reg [:] r_quadrant_flag_delay_0 = 'd0;
reg [:] r_quadrant_flag_delay_1 = 'd0;
always @(posedge i_clk)
begin
r_quadrant_flag_delay_0 <= {r_quadrant_flag_delay_0[:],r_quadrant_flag[]};
r_quadrant_flag_delay_1 <= {r_quadrant_flag_delay_1[:],r_quadrant_flag[]};
end
wire [:] demo;
assign demo = {r_quadrant_flag_delay_1[],r_quadrant_flag_delay_0[]};
always @(posedge i_clk)
begin
case ({r_quadrant_flag_delay_1[],r_quadrant_flag_delay_0[]})
'b01: //第1象限
begin
r_cos_x <= r_x_16;
r_sin_y <= r_y_16;
end
'b10: //第2象限
begin
r_cos_x <= ~r_y_16 + 'b1;
r_sin_y <= r_x_16;
end
'b11: //第3象限
begin
r_cos_x <= r_y_16;
r_sin_y <= ~r_x_16 + 'b1;
end
'b00: //第4象限
begin
r_cos_x <= r_x_16;
r_sin_y <= r_y_16;
end
endcase
end ////使能延迟对齐输出,延迟1+1+16+1
reg [:] r_en_delay = 'd0;
always @(posedge i_clk)
begin
r_en_delay <= {r_en_delay[:],i_en};
end
reg [:] r_error_delay = 'd0;
always @(posedge i_clk)
begin
r_error_delay <= {r_error_delay[:],r_error};
end
//信号输出
assign o_cos_x = r_cos_x;
assign o_sin_y = r_sin_y;
assign o_error = r_error_delay[];
assign o_en = r_en_delay[]; endmodule // end the cos_sin_cordic model;
直角坐标转极坐标
已知(x,y)求解(z,r),
算法流程:
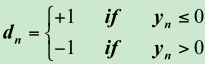
设置迭代次数为16,则x0 = x,y0 = y,z0 = 0,di与yi的符号相反。表示,经过n次旋转,使Pn靠近x轴。
因此,当迭代结束之后,Pn将近似接近x轴,此时yn = 0,可知旋转了θ,即zn = θ = arctan(y/x)。r= xn * ∏cosθi。即r=xn*K。而16次迭代下的K值为0.6072529351。
迭代公式如下:
xi+1 = xi – d iy i2-i
yi+1 = yi + d ix i2-i
zi+1 = zi - diθi
仿真结果如下所示。
x和y均为10000。
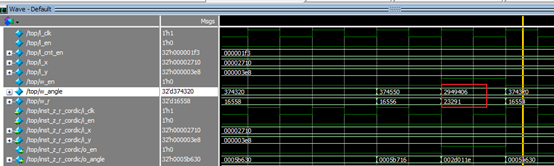
θ = 2949406/2^16 = 45.0044;R = 23291*K=23291* 0.6072529351= 14143.5281114141,跟matlab结果比较:14142.135623731
误差较小。
代码如下,勿做商业用途。
`timescale 1ns/1ps
module z_r_cordic (
input i_clk ,
input i_en ,
input [:] i_x ,
input [:] i_y ,
output o_en ,
output [:] o_angle ,
output [:] o_r
);
////parameter
parameter p_angle_0 = , //45°放大2^16
p_angle_1 = ,
p_angle_2 = ,
p_angle_3 = ,
p_angle_4 = ,
p_angle_5 = ,
p_angle_6 = ,
p_angle_7 = ,
p_angle_8 = ,
p_angle_9 = ,
p_angle_10 = ,
p_angle_11 = ,
p_angle_12 = ,
p_angle_13 = ,
p_angle_14 = ,
p_angle_15 = ; //赋初始值
reg [:] r_x_0 = 'd0;
reg [:] r_y_0 = 'd0;
reg [:] r_angle_remain_0 = 'd0;
always @(posedge i_clk)
begin
r_x_0 <= i_x;
r_y_0 <= i_y;
r_angle_remain_0 <= 'd0;
end
//第1次旋转
reg [:] r_x_1 = 'd0;
reg [:] r_y_1 = 'd0;
reg [:] r_angle_remain_1 = 'd0;
always @(posedge i_clk)
begin
if (r_y_0[]) //负数
begin
r_x_1 <= r_x_0 - r_y_0;
r_y_1 <= r_y_0 + r_x_0;
r_angle_remain_1 <= r_angle_remain_0 - p_angle_0;
end
else //角度为正
begin
r_x_1 <= r_x_0 + r_y_0;
r_y_1 <= r_y_0 - r_x_0;
r_angle_remain_1 <= r_angle_remain_0 + p_angle_0;
end
end
//第2次旋转
reg [:] r_x_2 = 'd0;
reg [:] r_y_2 = 'd0;
reg [:] r_angle_remain_2 = 'd0;
always @(posedge i_clk)
begin
if (r_y_1[]) //负数
begin
r_x_2 <= r_x_1 - {{{r_y_1[]}},r_y_1[:]};
r_y_2 <= r_y_1 + {{{r_x_1[]}},r_x_1[:]};
r_angle_remain_2 <= r_angle_remain_1 - p_angle_1;
end
else //角度为正
begin
r_x_2 <= r_x_1 + {{{r_y_1[]}},r_y_1[:]};
r_y_2 <= r_y_1 - {{{r_x_1[]}},r_x_1[:]};
r_angle_remain_2 <= r_angle_remain_1 + p_angle_1;
end
end
//第3次旋转
reg [:] r_x_3 = 'd0;
reg [:] r_y_3 = 'd0;
reg [:] r_angle_remain_3 = 'd0;
always @(posedge i_clk)
begin
if (r_y_2[]) //负数
begin
r_x_3 <= r_x_2 - {{{r_y_2[]}},r_y_2[:]};
r_y_3 <= r_y_2 + {{{r_x_2[]}},r_x_2[:]};
r_angle_remain_3 <= r_angle_remain_2 - p_angle_2;
end
else //角度为正
begin
r_x_3 <= r_x_2 + {{{r_y_2[]}},r_y_2[:]};
r_y_3 <= r_y_2 - {{{r_x_2[]}},r_x_2[:]};
r_angle_remain_3 <= r_angle_remain_2 + p_angle_2;
end
end
//第4次旋转
reg [:] r_x_4 = 'd0;
reg [:] r_y_4 = 'd0;
reg [:] r_angle_remain_4 = 'd0;
always @(posedge i_clk)
begin
if (r_y_3[]) //负数
begin
r_x_4 <= r_x_3 - {{{r_y_3[]}},r_y_3[:]};
r_y_4 <= r_y_3 + {{{r_x_3[]}},r_x_3[:]};
r_angle_remain_4 <= r_angle_remain_3 - p_angle_3;
end
else //角度为正
begin
r_x_4 <= r_x_3 + {{{r_y_3[]}},r_y_3[:]};
r_y_4 <= r_y_3 - {{{r_x_3[]}},r_x_3[:]};
r_angle_remain_4 <= r_angle_remain_3 + p_angle_3;
end
end
//第5次旋转
reg [:] r_x_5 = 'd0;
reg [:] r_y_5 = 'd0;
reg [:] r_angle_remain_5 = 'd0;
always @(posedge i_clk)
begin
if (r_y_4[]) //负数
begin
r_x_5 <= r_x_4 - {{{r_y_4[]}},r_y_4[:]};
r_y_5 <= r_y_4 + {{{r_x_4[]}},r_x_4[:]};
r_angle_remain_5 <= r_angle_remain_4 - p_angle_4;
end
else //角度为正
begin
r_x_5 <= r_x_4 + {{{r_y_4[]}},r_y_4[:]};
r_y_5 <= r_y_4 - {{{r_x_4[]}},r_x_4[:]};
r_angle_remain_5 <= r_angle_remain_4 + p_angle_4;
end
end
//第6次旋转
reg [:] r_x_6 = 'd0;
reg [:] r_y_6 = 'd0;
reg [:] r_angle_remain_6 = 'd0;
always @(posedge i_clk)
begin
if (r_y_5[]) //负数
begin
r_x_6 <= r_x_5 - {{{r_y_5[]}},r_y_5[:]};
r_y_6 <= r_y_5 + {{{r_x_5[]}},r_x_5[:]};
r_angle_remain_6 <= r_angle_remain_5 - p_angle_5;
end
else //角度为正
begin
r_x_6 <= r_x_5 + {{{r_y_5[]}},r_y_5[:]};
r_y_6 <= r_y_5 - {{{r_x_5[]}},r_x_5[:]};
r_angle_remain_6 <= r_angle_remain_5 + p_angle_5;
end
end
//第7次旋转
reg [:] r_x_7 = 'd0;
reg [:] r_y_7 = 'd0;
reg [:] r_angle_remain_7 = 'd0;
always @(posedge i_clk)
begin
if (r_y_6[]) //负数
begin
r_x_7 <= r_x_6 - {{{r_y_6[]}},r_y_6[:]};
r_y_7 <= r_y_6 + {{{r_x_6[]}},r_x_6[:]};
r_angle_remain_7 <= r_angle_remain_6 - p_angle_6;
end
else //角度为正
begin
r_x_7 <= r_x_6 + {{{r_y_6[]}},r_y_6[:]};
r_y_7 <= r_y_6 - {{{r_x_6[]}},r_x_6[:]};
r_angle_remain_7 <= r_angle_remain_6 + p_angle_6;
end
end
//第8次旋转
reg [:] r_x_8 = 'd0;
reg [:] r_y_8 = 'd0;
reg [:] r_angle_remain_8 = 'd0;
always @(posedge i_clk)
begin
if (r_y_7[]) //负数
begin
r_x_8 <= r_x_7 - {{{r_y_7[]}},r_y_7[:]};
r_y_8 <= r_y_7 + {{{r_x_7[]}},r_x_7[:]};
r_angle_remain_8 <= r_angle_remain_7 - p_angle_7;
end
else //角度为正
begin
r_x_8 <= r_x_7 + {{{r_y_7[]}},r_y_7[:]};
r_y_8 <= r_y_7 - {{{r_x_7[]}},r_x_7[:]};
r_angle_remain_8 <= r_angle_remain_7 + p_angle_7;
end
end
//第9次旋转
reg [:] r_x_9 = 'd0;
reg [:] r_y_9 = 'd0;
reg [:] r_angle_remain_9 = 'd0;
always @(posedge i_clk)
begin
if (r_y_8[]) //负数
begin
r_x_9 <= r_x_8 - {{{r_y_8[]}},r_y_8[:]};
r_y_9 <= r_y_8 + {{{r_x_8[]}},r_x_8[:]};
r_angle_remain_9 <= r_angle_remain_8 - p_angle_8;
end
else //角度为正
begin
r_x_9 <= r_x_8 + {{{r_y_8[]}},r_y_8[:]};
r_y_9 <= r_y_8 - {{{r_x_8[]}},r_x_8[:]};
r_angle_remain_9 <= r_angle_remain_8 + p_angle_8;
end
end
//第10次旋转
reg [:] r_x_10 = 'd0;
reg [:] r_y_10 = 'd0;
reg [:] r_angle_remain_10 = 'd0;
always @(posedge i_clk)
begin
if (r_y_9[]) //负数
begin
r_x_10 <= r_x_9 - {{{r_y_9[]}},r_y_9[:]};
r_y_10 <= r_y_9 + {{{r_x_9[]}},r_x_9[:]};
r_angle_remain_10 <= r_angle_remain_9 - p_angle_9;
end
else //角度为正
begin
r_x_10 <= r_x_9 + {{{r_y_9[]}},r_y_9[:]};
r_y_10 <= r_y_9 - {{{r_x_9[]}},r_x_9[:]};
r_angle_remain_10 <= r_angle_remain_9 + p_angle_9;
end
end
//第11次旋转
reg [:] r_x_11 = 'd0;
reg [:] r_y_11 = 'd0;
reg [:] r_angle_remain_11 = 'd0;
always @(posedge i_clk)
begin
if (r_y_10[]) //负数
begin
r_x_11 <= r_x_10 - {{{r_y_10[]}},r_y_10[:]};
r_y_11 <= r_y_10 + {{{r_x_10[]}},r_x_10[:]};
r_angle_remain_11 <= r_angle_remain_10 - p_angle_10;
end
else //角度为正
begin
r_x_11 <= r_x_10 + {{{r_y_10[]}},r_y_10[:]};
r_y_11 <= r_y_10 - {{{r_x_10[]}},r_x_10[:]};
r_angle_remain_11 <= r_angle_remain_10 + p_angle_10;
end
end
//第12次旋转
reg [:] r_x_12 = 'd0;
reg [:] r_y_12 = 'd0;
reg [:] r_angle_remain_12 = 'd0;
always @(posedge i_clk)
begin
if (r_y_11[]) //负数
begin
r_x_12 <= r_x_11 - {{{r_y_11[]}},r_y_11[:]};
r_y_12 <= r_y_11 + {{{r_x_11[]}},r_x_11[:]};
r_angle_remain_12 <= r_angle_remain_11 - p_angle_11;
end
else //角度为正
begin
r_x_12 <= r_x_11 + {{{r_y_11[]}},r_y_11[:]};
r_y_12 <= r_y_11 - {{{r_x_11[]}},r_x_11[:]};
r_angle_remain_12 <= r_angle_remain_11 + p_angle_11;
end
end
//第13次旋转
reg [:] r_x_13 = 'd0;
reg [:] r_y_13 = 'd0;
reg [:] r_angle_remain_13 = 'd0;
always @(posedge i_clk)
begin
if (r_y_12[]) //负数
begin
r_x_13 <= r_x_12 - {{{r_y_12[]}},r_y_12[:]};
r_y_13 <= r_y_12 + {{{r_x_12[]}},r_x_12[:]};
r_angle_remain_13 <= r_angle_remain_12 - p_angle_12;
end
else //角度为正
begin
r_x_13 <= r_x_12 + {{{r_y_12[]}},r_y_12[:]};
r_y_13 <= r_y_12 - {{{r_x_12[]}},r_x_12[:]};
r_angle_remain_13 <= r_angle_remain_12 + p_angle_12;
end
end
//第14次旋转
reg [:] r_x_14 = 'd0;
reg [:] r_y_14 = 'd0;
reg [:] r_angle_remain_14 = 'd0;
always @(posedge i_clk)
begin
if (r_y_13[]) //负数
begin
r_x_14 <= r_x_13 - {{{r_y_13[]}},r_y_13[:]};
r_y_14 <= r_y_13 + {{{r_x_13[]}},r_x_13[:]};
r_angle_remain_14 <= r_angle_remain_13 - p_angle_13;
end
else //角度为正
begin
r_x_14 <= r_x_13 + {{{r_y_13[]}},r_y_13[:]};
r_y_14 <= r_y_13 - {{{r_x_13[]}},r_x_13[:]};
r_angle_remain_14 <= r_angle_remain_13 + p_angle_13;
end
end
//第15次旋转
reg [:] r_x_15 = 'd0;
reg [:] r_y_15 = 'd0;
reg [:] r_angle_remain_15 = 'd0;
always @(posedge i_clk)
begin
if (r_y_14[]) //负数
begin
r_x_15 <= r_x_14 - {{{r_y_14[]}},r_y_14[:]};
r_y_15 <= r_y_14 + {{{r_x_14[]}},r_x_14[:]};
r_angle_remain_15 <= r_angle_remain_14 - p_angle_14;
end
else //角度为正
begin
r_x_15 <= r_x_14 + {{{r_y_14[]}},r_y_14[:]};
r_y_15 <= r_y_14 - {{{r_x_14[]}},r_x_14[:]};
r_angle_remain_15 <= r_angle_remain_14 + p_angle_14;
end
end
//第16次旋转
reg [:] r_x_16 = 'd0;
reg [:] r_y_16 = 'd0;
reg [:] r_angle_remain_16 = 'd0;
always @(posedge i_clk)
begin
if (r_y_14[]) //负数
begin
r_x_16 <= r_x_15 - {{{r_y_15[]}},r_y_15[:]};
r_y_16 <= r_y_15 + {{{r_x_15[]}},r_x_15[:]};
r_angle_remain_16 <= r_angle_remain_15 - p_angle_15;
end
else //角度为正
begin
r_x_16 <= r_x_15 + {{{r_y_15[]}},r_y_15[:]};
r_y_16 <= r_y_15 - {{{r_x_15[]}},r_x_15[:]};
r_angle_remain_16 <= r_angle_remain_15 + p_angle_15;
end
end
////使能延迟对齐输出
reg [:] r_en_delay = 'd0;
always @(posedge i_clk)
begin
r_en_delay <= {r_en_delay[:],i_en};
end
////信号输出
assign o_angle = r_angle_remain_16;
assign o_r = r_x_16;
assign o_en = r_en_delay[]; endmodule // end the z_r_cordic model;
双曲反正切的妙用
双曲反正切有啥用呢,如果你想求log10,冥思苦想,这玩意咋用verilog求?而我们知道如下公式:

则log10就可以转化为求解arctanh的值。而我们知道,arctanh是可以用cordic在双曲模式下求解其值的。所以,log就可以用cordic求解。
在双曲模式下的算法迭代跟其他的不一样,涉及到收敛问题,且从N为4开始,每当3k+1的项需要重复迭代。即1,2,3,4,4,5,6.....12,13,13,14.....
而同时简单的正数迭代,y和x的取值范围十分有限,对于arctanh((r-1)/(r+1))的r最大值仅仅为9,简直是不可用的。
还好前人早已想到了这个问题,请参考论文,需要添加负数次的迭代,扩大定义域。
算法过程:
1.取x=r+1,y=r-1,z=0。当Y迭代逼近0的时候,z的值即为arctanh((r-1)/(r+1))的值。取迭代次数为16次的时候,N=-5起始迭代。则可以事先求解出相应的arctanh值作为常量供迭代方程加减。

2.迭代公式,选取从N=-5处开始迭代,则有
3.编写verilog代码。
仿真一下看看。
r=10仿真结果如下所示:x,y首先均左移8位。
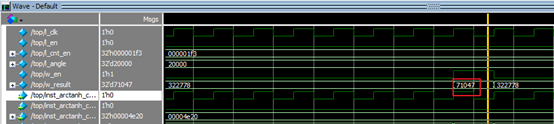
log10(10) = 71047/2^16*0.86858896 = 0.9416
log10(100) = 125429/2^16*0.86858896 = 1.6624
log10(1000) =225544/2^16*0.86858896 = 2.9893
log10(10000) = 299021/2^16*0.86858896 = 3.9631
有一定的误差,跟迭代次数和迭代输入值x,y有关
注意事项:(1)处理中间结果的越界问题,位宽需要注意。
(2)如果r输入是个很小的数,比如10,可能还没迭代两次,y就到0了,必然导致结果的误差过大,则可以放大x和y,毕竟我们知道arctanh(y/x)=arctanh(y*k/(x*k))的。
所以结果并不会发生改变,但可以使得迭代更多次,保证精度。当然预先做个数值范围判定移位更佳。
(3)算术移位的问题,必须定义signed,否则会有问题的。还是老实使用拼接截位操作得好。
以上只是对算法进行了功能的实现,侧重点并不在资源量的最优。
以上。
使用帅气的cordic算法进行坐标系互转及log10的求解的更多相关文章
- 基于FPGA的Cordic算法实现
CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法,是J.D.Volder1于1959年首次提出,主要用于三角函数.双曲线.指数.对数的 ...
- 三角函数计算,Cordic 算法入门
[-] 三角函数计算Cordic 算法入门 从二分查找法说起 减少乘法运算 消除乘法运算 三角函数计算,Cordic 算法入门 三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来 ...
- (转)三角函数计算,Cordic 算法入门
由于最近要使用atan2函数,但是时间上消耗比较多,因而网上搜了一下简化的算法. 原帖地址:http://blog.csdn.net/liyuanbhu/article/details/8458769 ...
- 基于FPGA的cordic算法的verilog初步实现
最近在看cordic算法,由于还不会使用matlab,真是痛苦,一系列的笔算才大概明白了这个算法是怎么回事.于是尝试用verilog来实现.用verilog实现之前先参考软件的程序,于是先看了此博文h ...
- Cordic 算法之 反正切
在通信的算法中,常采用Cordic算法之一,知道角度产生正交的的正弦余弦, 或者知道正弦和余弦求角度,求反正切. 1. 求正弦和余弦值. 方法:旋转角度,得到正弦余弦值: 再旋转角度,到达下一个正弦余 ...
- Cordic 算法的原理介绍
cordic 算法知道正弦和余弦值,求反正切,即角度. 采用用不断的旋转求出对应的正弦余弦值,是一种近似求解发. 旋转的角度很讲求,每次旋转的角度必须使得 正切值近似等于 1/(2^N).旋转的目的是 ...
- Cordic算法——verilog实现
上两篇博文Cordic算法--圆周系统之旋转模式.Cordic算法--圆周系统之向量模式做了理论分析和实现,但是所用到的变量依然是浮点型,而cordic真正的用处是基于FPGA等只能处理定点的平台.只 ...
- Cordic算法——圆周系统之向量模式
旋转模式用来解决三角函数,实现极坐标到直角坐标的转换,基础理论请参考Cordic算法--圆周系统之旋转模式.那么,向量模式则用来解决反三角函数的问题,体现的应用主要是直角坐标向极坐标转换,即已知一点的 ...
- Cordic算法——圆周系统之旋转模式
三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来计算任意角度的三角函数的值.这种表格在人们刚刚产生三角函数的概念的时候就已经有了,它们通常是通过从已知值(比如sin(π/2)= ...
随机推荐
- C语言 消灭编译警告(Warning)
如何看待编译警告 当编译程序发现程序中某个地方有疑问,可能有问题时就会给出一个警告信息.警告信息可能意味着程序中隐含的大错误,也可能确实没有问题.对于警告的正确处理方式应该是:尽可能地消除之.对于编译 ...
- 一百四十五:CMS系统之帖子加精和取消加精
模型 class HighlightPostModel(db.Model): """ 帖子加精信息 """ __tablename__ = ...
- hdfs中删除文件、文件夹、抓取内容
删除文件 bin/hdfs dfs -rm output2/* 删除文件夹 bin/hdfs dfs -rm -r output2 抓取内容 bin/hdfs dfs -cat /us ...
- Docker镜像仓库Harbor搭建
园子里面已经有人写过了.也写得很好,我这里只记录下我遇到的问题 Harbor 依赖: 1:docker 2:docker-compose 怎么安装就不说了. 然后是安装Harbor github:ht ...
- 《Fluid Engine Development》 学习笔记4-预测校正不可压缩SPH-PCISPH
传统SPH方案的主要问题之一是时间步长限制.在原始的SPH中,我们首先从当前设置计算密度,使用EOS计算压强,应用压力梯度,然后运行时间积分.这个过程意味着只需要一定的压缩量就可以触发内核半径内的压力 ...
- await/async闲说
C#中await/async闲说 自从C#5.0增加异步编程之后,异步编程越来越简单,async和await用的地方越来越多,越来越好用,只要用异步的地方都是一连串的异步,如果想要异步编程的时候,需要 ...
- openstack环境-解决windows虚机重启后比当前时间晚8小时问题
背景: 生产环境下,发现windows虚机每次重启,时间都会倒退到虚机的格林威治时间(+8小时才是北京时间),也就是比当前时间晚8小时.测试发现,windows虚机所用的镜像,缺少了一个os_type ...
- Mongodb: com.mongodb.MongoSocketReadException: Prematurely reached end of stream
saveLocationInfo errorcom.mongodb.MongoSocketReadException: Prematurely reached end of stream at com ...
- SpringBoot(二)启动原理
SpringBoot自动配置模块 该配置模块的主要使用到了SpringFactoriesLoader,即Spring工厂加载器,该对象提供了loadFactoryNames方法,入参为factoryC ...
- 消息中间件——RocketMQ(一) 环境搭建(完整版)
每章一点正能量:每当你想要放弃的时候,就想想是为了什么才一路坚持到现在. 前言 最近在回顾复习Java基础中的一些知识点,发现了一些以前见过但是没有留意却特别有意思的知识特性,比如这次想分享的Java ...