poj 3304 Segments(解题报告)
收获:举一反三:刷一道会一道
1:思路转化:(看的kuangbin的思路)
首先是在二维平面中:如果有很多线段能够映射到这个直线上并且至少重合于一点,充要条件: 是过这个点的此条直线的垂线与其他所有直线都相交
取极限情况: 此垂线与直线的交点是端点的情况
则可以通过枚举所有的端点所在的直线进行判断,若不存在这样的直线,则输出No!
细节:枚举的两端点存在重合的情况
为了谨慎起见:枚举所有可能情况,包括输入的线段所在的直线也是垂线的情况
2:直线与线段相交和线段与线段相交的区别:
线段的端点是不可变的,而对于线段所在的直线
bool line_segment(Line l1,Line l2)//l1直线和l2线段相交判断(写反了就会错)
{
return cmp(det(l2.s,l1.s,l1.e))*cmp(det(l2.e,ll.s,l1.e))<=0;
} bool segmen_segment(Line l1,Line l2)//线段l1和线段l2
{
return (cmp(det(l2.s,l1.s,l1.e))*cmp(det(l2.e,l1.s,l1.e))<=0)&&(cmp(det(l1.s,l2.s,l2.e))*cmp(det(l1.e,l2.s,l2.e))<=0);
}
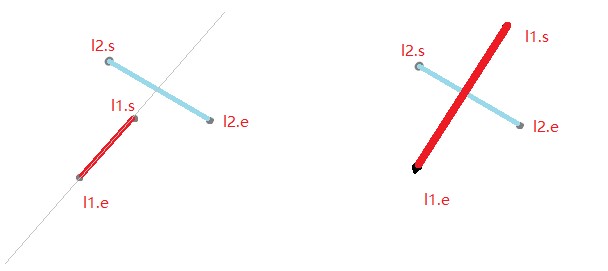
如下图:(此处只讨论严格相交,严格相交:两条线段只有一个公共点,而且这个公共点不是端点)
#include<iostream>
#include<cmath>
//完全参考kuangbin的代码
using namespace std;
const double eps = 1e-8; int sgn(double x)
{
if(fabs(x)<eps)return 0;
if(x<0)return -1;
return 1;
} struct Point
{
double x,y;
Point(){};
Point (double _x,double _y)
{x=_x;y=_y;}
Point operator - (const Point &b)const
{
return Point(x-b.x,y-b.y);
}
double operator *(const Point &b)const
{
return x*b.x+y*b.y;
}
double operator ^ (const Point &b)const
{
return x*b.y-y*b.x;
}
}; struct Line{
Point s,e;
Line() {}
Line (Point _s,Point _e)
{
s=_s;
e=_e;
}
}; const int MAXN=1010;
Line line[MAXN]; double xmult(Point p0,Point p1,Point p2)//叉积
{
return (p1-p0)^(p2-p0);
} bool xmultline(Line l1,Line l2)//判断直线1和线段l2是否相交
{
//return sgn(xmult(l2.e,l1.e,l1.s))*sgn(xmult(l2.s,l1.e,l1.s))<=0;
return sgn(xmult (l1.e,l2.e,l2.s))*sgn(xmult(l1.s,l2.e,l2.s))<=0;//错误
} double dis(Point p1,Point p2)
{
return sqrt((p1-p2)*(p1-p2));
}
bool check(Line ll,int n)
{
if(sgn(dis(ll.s,ll.e))==0)return false ; for(int i=0;i<n;i++)
{
if(xmultline(ll,line[i])==false)
return false;
}
return true;
} int main ()
{
int t;
cin>>t;
while(t--)
{
int m;
cin>>m;
double x1,x2,y1,y2;
for(int i=0;i<m;i++)
{
cin>>x1>>y1>>x2>>y2;
line[i]=Line(Point(x1,y1),Point(x2,y2));
}
bool flag= false;
for(int i=0;i<m;i++)
for(int j=0;j<m;j++)
{
int n=m;
if(check(Line(line[i].s,line[j].s),n) || check(Line(line[i].s,line[j].e),n)
|| check(Line(line[i].e,line[j].s),n) || check(Line(line[i].e,line[j].e),n) )
{
flag=true;
break;
}
}
if(flag)
cout<<"Yes!"<<endl;
else
cout<<"No!"<<endl;
}
return 0;
}
自己照着套路写的:
#include<iostream>
#include<cmath> using namespace std; double eps=1e-8; int cmp(double x)
{
if(fabs(x)<=eps)return 0;
if(x<0)return -1;
return 1;
} struct Point{
double x,y;
Point (){}
Point (double _x,double _y)
{
x=_x,y=_y;
}
Point operator -(const Point &b)const
{
return Point (x-b.x,y-b.y);
}
double operator *(const Point &b)const
{
return x*b.x+y*b.y;
}
double operator ^(const Point &b)const
{
return x*b.y-y*b.x;
}
bool operator ==(const Point &b)const//重载==
{
if(cmp(fabs(x-b.x))==0&&cmp(fabs(y-b.y)==0))
return true;
return false;
}
}; struct Line{
Point s,e;
Line(){}
Line(Point _s,Point _e)
{
s=_s;
e=_e;
}
}; const int MAXN =110;
Line line[MAXN];
double xmult(Point p0,Point p1,Point p2)
{
return (p1-p0)^(p2-p0);
} bool line_segment(Line l1,Line l2 )//直线l1和线段l2
{
if(cmp(xmult(l2.s,l1.s,l1.e))*cmp(xmult(l2.e,l1.s,l1.e))<=0)
return true;
return false;
}
bool chack(Line ll ,int m)//与所有边相交判断
{
if(ll.s==ll.e)return false ;
for(int i=0;i<m;i++)
{
if(line_segment(ll,line[i])==false)
return false;
}
return true;
} int main ()
{
int t;
cin>>t;
int n;
double x1,x2,y1,y2;
while(t--)
{
cin>>n;
for(int i=0;i<n;i++)
{ cin>>x1>>y1>>x2>>y2;
line[i]=Line(Point(x1,y1),Point(x2,y2));
}
bool flag=false;
for(int i=0;i<n;i++)
for(int j=0;j<n;j++)
{
int m=n;
if(chack(Line(line[i].s,line[j].s),m)||chack(Line(line[i].s,line[j].e),m)||chack(Line(line[i].e,line[j].s),m)||chack(Line(line[i].e,line[j].e),m))
flag=true;
}
if(flag)
cout<<"Yes!"<<endl;
else
cout<<"No!"<<endl; } return 0;
}
poj 3304 Segments(解题报告)的更多相关文章
- POJ 3304 Segments(判断直线与线段是否相交)
题目传送门:POJ 3304 Segments Description Given n segments in the two dimensional space, write a program, ...
- POJ 3304 Segments(计算几何:直线与线段相交)
POJ 3304 Segments 大意:给你一些线段,找出一条直线可以穿过全部的线段,相交包含端点. 思路:遍历全部的端点,取两个点形成直线,推断直线是否与全部线段相交,假设存在这种直线,输出Yes ...
- POJ 3304 Segments 判断直线和线段相交
POJ 3304 Segments 题意:给定n(n<=100)条线段,问你是否存在这样的一条直线,使得所有线段投影下去后,至少都有一个交点. 思路:对于投影在所求直线上面的相交阴影,我们可以 ...
- POJ 2002 Squares 解题报告(哈希 开放寻址 & 链式)
经典好题. 题意是要我们找出所有的正方形.1000点,只有枚举咯. 如图,如果我们知道了正方形A,B的坐标,便可以推测出C,D两点的坐标.反之,遍历所有点作为A,B点,看C,D点是否存在.存在的话正方 ...
- POJ 3304 Segments (判断直线与线段相交)
题目链接:POJ 3304 Problem Description Given n segments in the two dimensional space, write a program, wh ...
- 简单几何(线段与直线的位置) POJ 3304 Segments
题目传送门 题意:有若干线段,问是否存在一条直线,所有线段投影到直线上时至少有一个公共点 分析:有一个很好的解题报告:二维平面上线段与直线位置关系的判定.首先原问题可以转换为是否存在一条直线与所有线段 ...
- POJ 3304 Segments 基础线段交判断
LINK 题意:询问是否存在直线,使得所有线段在其上的投影拥有公共点 思路:如果投影拥有公共区域,那么从投影的公共区域作垂线,显然能够与所有线段相交,那么题目转换为询问是否存在直线与所有线段相交.判断 ...
- POJ 3304 Segments (直线和线段相交判断)
Segments Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 7739 Accepted: 2316 Descript ...
- 【原创】poj ----- 1182 食物链 解题报告
题目地址: http://poj.org/problem?id=1182 题目内容: 食物链 Time Limit: 1000MS Memory Limit: 10000K Total Submi ...
随机推荐
- Java实现PDF和Excel生成和数据动态插入以及导出
一.序言 Excel.PDF的导出.导入是我们工作中经常遇到的一个问题,刚好今天公司业务遇到了这个问题,顺便记个笔记以防下次遇到相同的问题而束手无策. 公司有这么两个需求: 需求一.给了一个表单,让把 ...
- Java通过基姆拉尔森公式判断当前日期是不是工作日
基姆拉尔森公式 算法如下: 基姆拉尔森计算公式 W= (d+2*m+3*(m+1)/5+y+y/4-y/100+y/400+1)%7 在公式中d表示日期中的日数,m表示月份数,y表示年数. 注意:在公 ...
- Linux tar压缩和解压
经常会忘记 tar 压缩和解压命令的使用,故记下来. 1. 打包压缩 tar -zcvf pack.tar.gz pack/ #打包压缩为一个.gz格式的压缩包 tar -jcvf pack.tar. ...
- .NET 云原生架构师训练营(模块二 基础巩固 Scrum 核心)--学习笔记
2.7.2 Scrum 核心 3个工件 5个会议 5个价值观 3个工件 产品待办列表(Product Backlog) Sprint 待办列表(Sprint Backlog) 产品增量(Product ...
- Github Python计算器开源项目 二次开发--增加函数图形
先上原项目链接:https://github.com/xhf79/Calculator_pyqt python+Qt 开发的计算器 原项目界面和功能如图所示: 科学计算的内容基本都有,但按照项目的提示 ...
- 记一道C语言编程题(C语言学习笔记)
题目如下 解答如下 #include <stdio.h> #include<math.h> double Mysqrt(double n) { return sqrt(n); ...
- oracle 释放表空间到OS(resize)
1.查看表空间里面的对象 SELECT OWNER AS OWNER, SEGMENT_NAME AS SEGMENT_NAME, SEGMENT_TYPE AS SEGMENT_TYPE, SUM ...
- Mybatis入门Demo(单表的增删改查)
1.Mybatis 什么是Mybatis: mybatis是一个持久层框架,用java编写的 它封装了jdbc操作的很多细节,使开发者只需要关注sql语句本身,而无需关注注册驱动.创建连接等繁杂过程 ...
- .NET Core 问题记录
前言: 最近在项目中遇到了遇到了写部署步骤过多的问题,为了减少.net core项目部署步骤:需要对一些基础问题进行验证: 如端口设置.单页应用程序(angluar)合并部署方式等相关问题,特将解决过 ...
- top命令详解-性能分析
top命令是Linux下常用的性能分析工具,能够实时显示系统中各个进程的资源占用状况,常用于服务端性能分析. top命令说明 [www.linuxidc.com@linuxidc-t-tomcat-1 ...