拉格朗日乘法与KKT条件
问题的引出
给定一个函数\(f\),以及一堆约束函数\(g_1,g_2,...,g_m\)和\(h_1,h_2,...,h_l\).带约束的优化问题可以表示为
\]
下面我们将来讨论具有上述问题的解,一共可以分为四种情况:
- 无约束条件
- 只有等式约束条件
- 只有不等式约束条件
- 同时有等式和不等式约束条件
无约束条件
我们先来复习一下多元函数取得极值的条件。设\(f: R^n \to R\),是一个连续可导的函数,并且\(J_f\)和\(H_f\)分别是\(f\)的一阶梯度和二阶梯度矩阵(Hession矩阵),判断\(f(x^*)\)是它的一个极值的条件是:
- \(J_f=0,H_f\)是负定矩阵,则\(x^*\)是\(f\)的极大值
- \(J_f=0,H_f\)是正定矩阵,则\(x^*\)是\(f\)的极小值
- \(J_f=0,H_f\)是半正定或半负定或不定矩阵,则需要进一步讨论
这样,无约束下的最优化问题可以通过上述规则来求函数的极值。
等式约束条件
只含等式约束条件的最优化问题表示为(以一个等式约束为例)
\]
下面用具体的实例来讨论这一类问题,令
\]
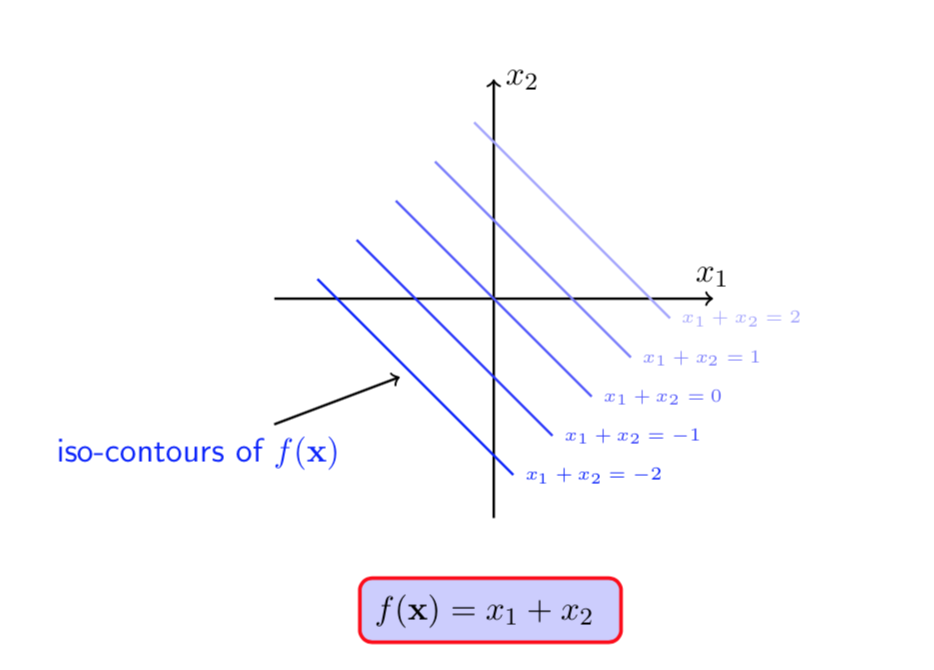
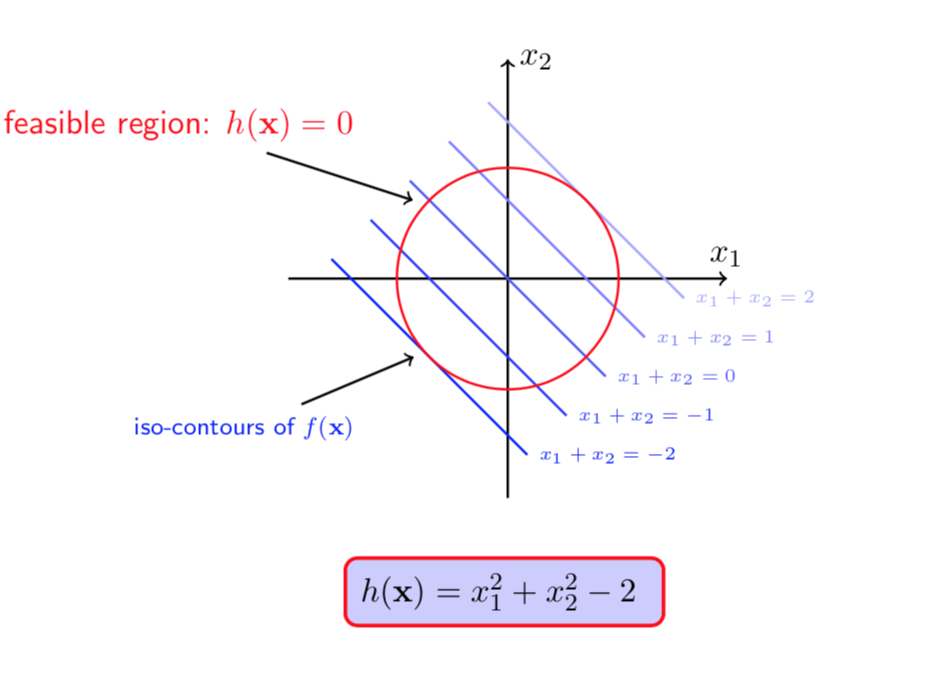
图(1 ) 图(2)
在图(1)和(2)中蓝色线是\(f(X)\)的等高线,红色线是在\(h(X) = 0\)约束下的可行域(\(X\)可取值的可行范围)。
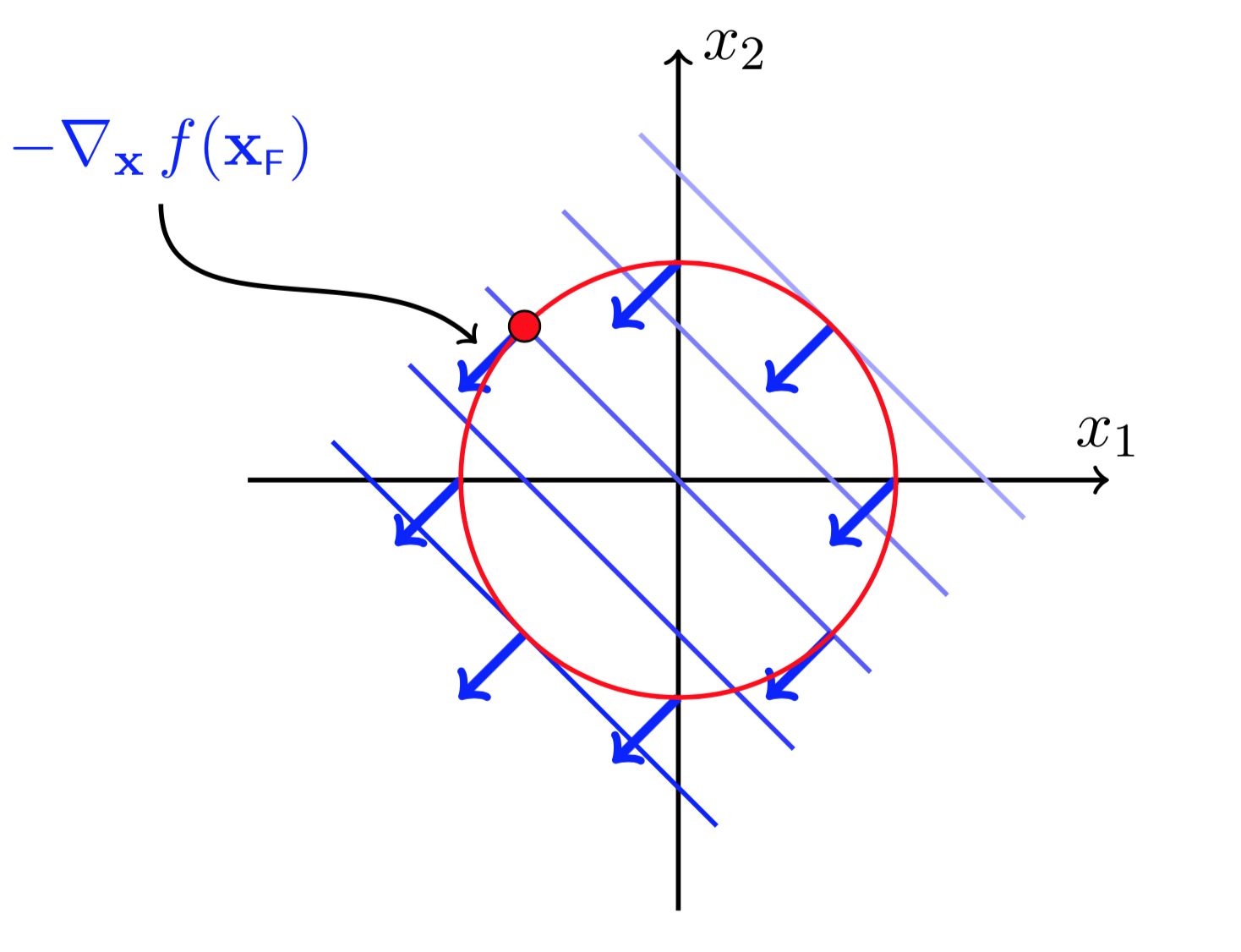
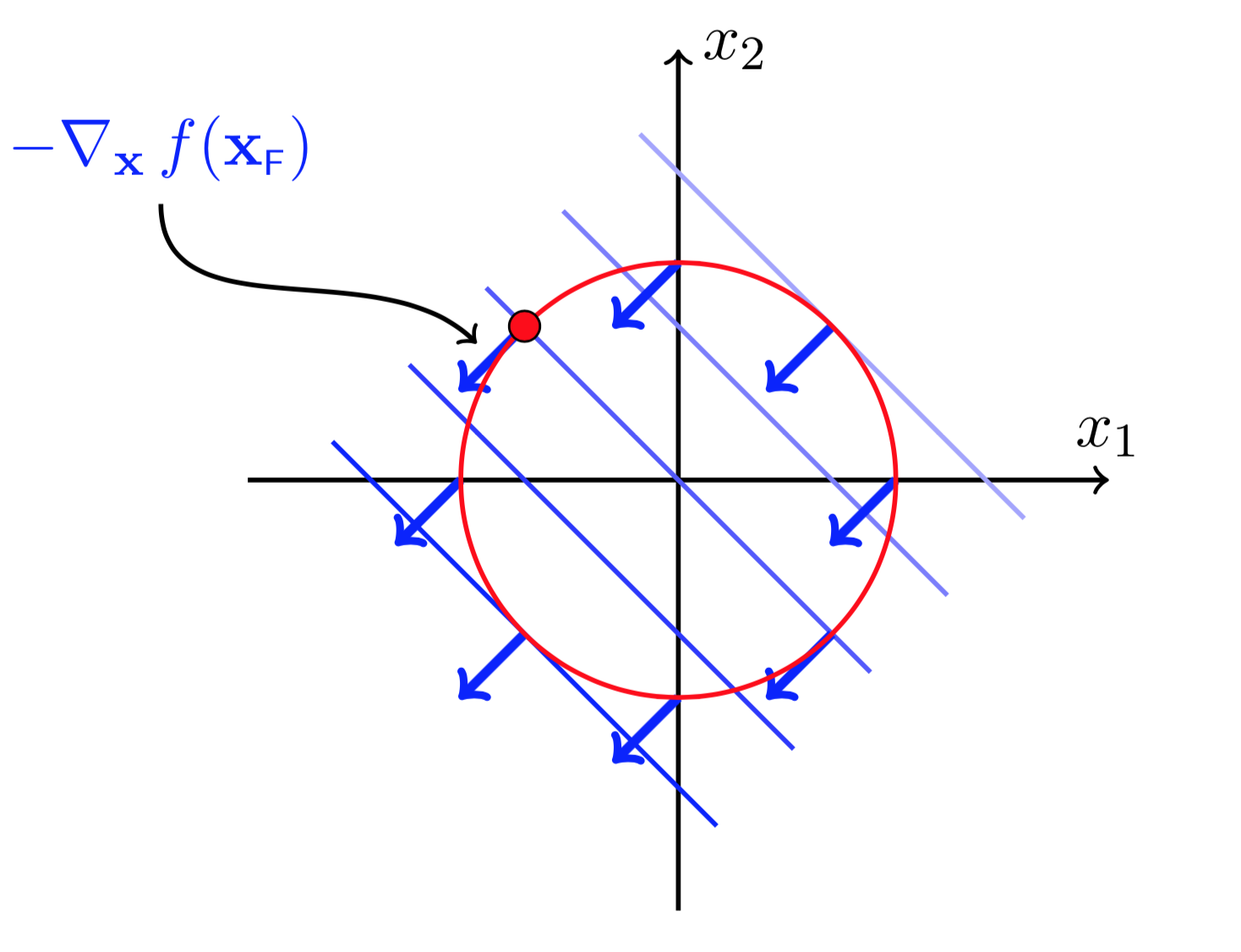
图(3 ) 图(4)
为了找到\(f(X)\)的最小值。如图(3),我们需要从红色点的位置(点\(X_F\))往某一个方向走一小步,并且目标位置依然在可行域内(满足\(h(X)=0\)的限制),同时还希望\(f(X)\)的值能够下降,即
\]
我们知道沿着梯度的反方向是下降最快的。如果要满足\(\quad f(X_F) >f(X_F+ \Delta X)\)则必须有
\]
意思就是说,下一步走的方向\(\Delta X\)应该与\(-\nabla_Xf(X)\)的夹角小于等于90度。
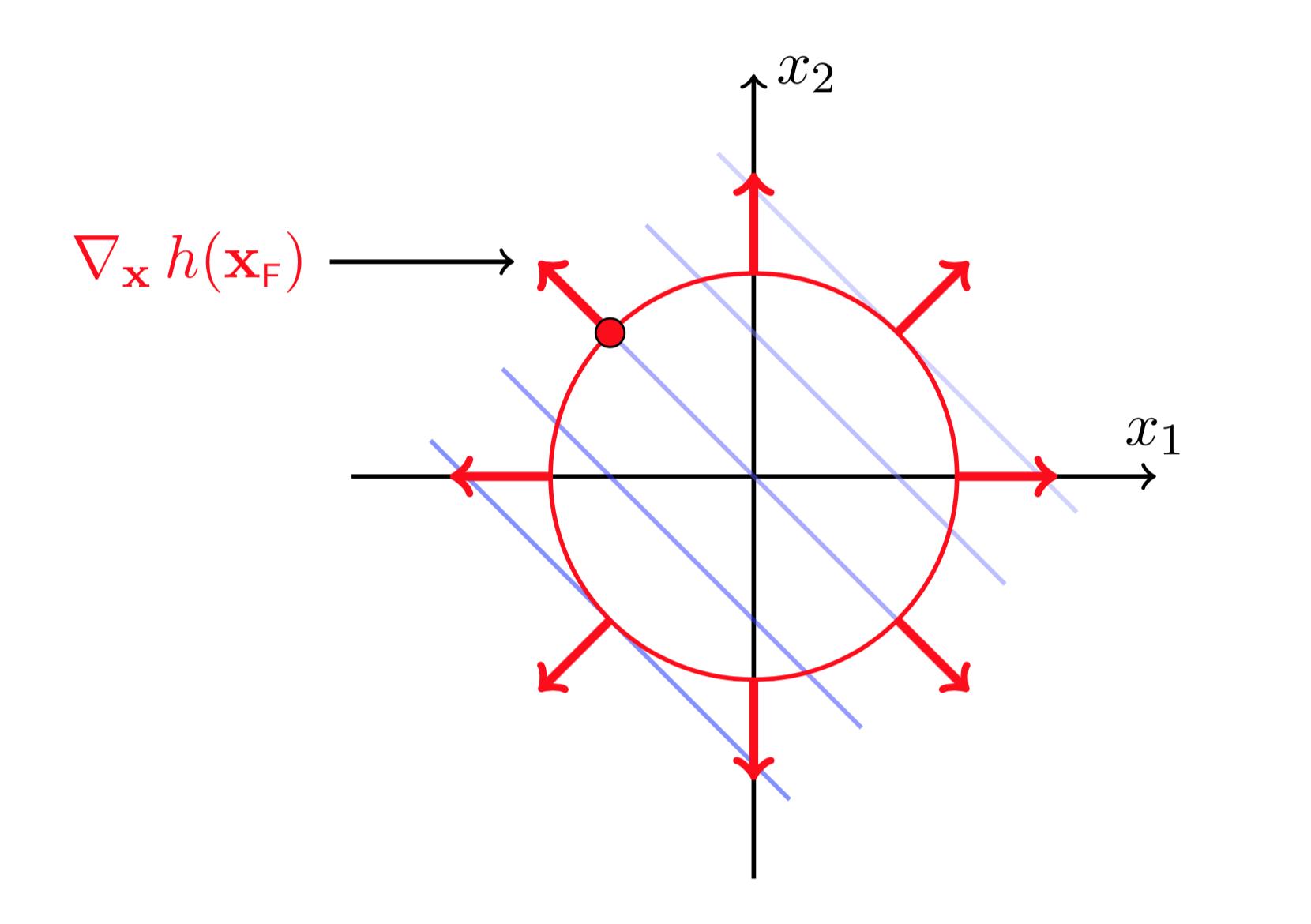
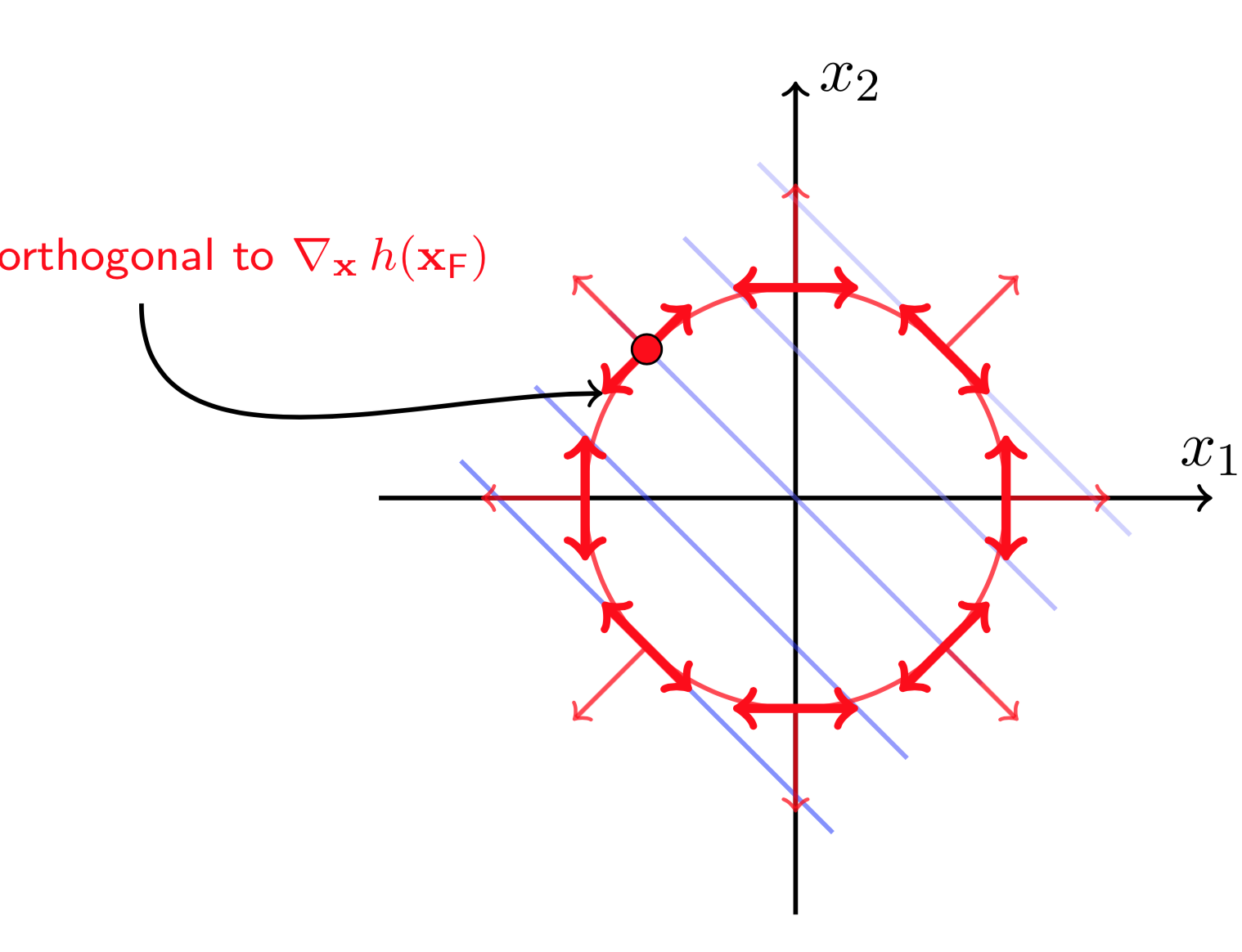
图(5 ) 图(6)
图(5)和图(6)分别画出了约束函数\(h(X)\)的梯度方向以及梯度的正交方向。为了限制在移动\(X_F\)后,使得\(X_F+\Delta X\)依然在约束曲线上,则\(\Delta X\)必须沿着\(h(X)\)梯度的正交方向移动(否则\(h(X)\)会增大或减小,这样不再满足约束条件\(h(X)= 0\))。这说明任何时刻都有
\(\Delta X\)沿着\(\nabla_Xh(X_F)\)正交方向移动,可以保证\(h(X_F+\Delta X)=0\).
当$f(X_F) >f(X_F+ \Delta X) $时,必须有
\[\Delta X \cdot (-\nabla_X f(X)) > 0
\]
考虑一种情况
\]
其中\(\mu\)是一个常数,此时
- 当移动\(\Delta X\)时,\(\Delta X \cdot (-\nabla_x f(X)) = -\mu\Delta X \cdot \nabla_x h(X) = 0\).
- 无法找到一个方向\(\Delta X\)使得\(f(X)\)能够继续减小或增大,此时\(X_F\)是函数的一个极值点.
回到我们最初的问题
\]
定义拉格朗日函数
\]
\(X^*\)是一个局部最小值的充分条件是
- \(\nabla _XL(X^*,\mu^*) = 0\).
- \(\nabla _{\mu}L(X^*,\mu^*) = 0\).
- \(Y^T\nabla_{XX}^2L(X^*,\mu^*)Y>0 \quad s.t. \;(\nabla_Xh(X^*))^TY = 0\)
最后的约束条件是保证\(Y\)的方向与\(h(X)\)梯度方向正交。上面结论很容易推广到多等式约束问题,设
\]
定义拉格朗日函数
\]
\(X^*\)是一个局部最小值的充分条件是
- \(\nabla _XL(X^*,\mu^*) = 0\).
- \(\nabla _{\mu}L(X^*,\mu^*) = 0\).
- \(Y^T\nabla_{XX}^2L(X^*,\mu^*)Y>0 \quad s.t. \;(\nabla_Xh(X))^TY = 0\)
不等式约束条件
只包含一个不等式约束的优化问题
\]
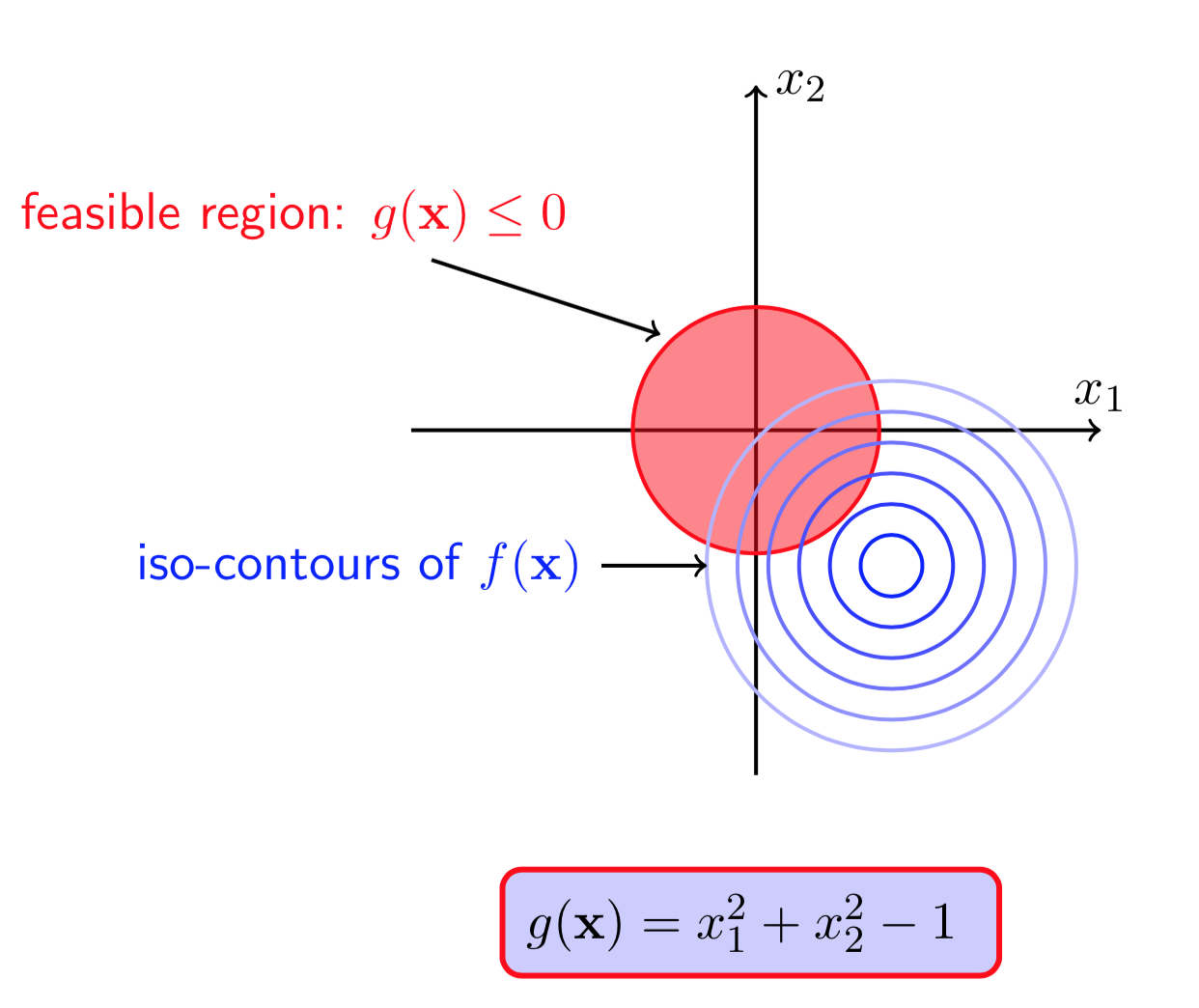
为了便于理解,我们设
g(X)=x_1^2+x^2_2-1.
\]

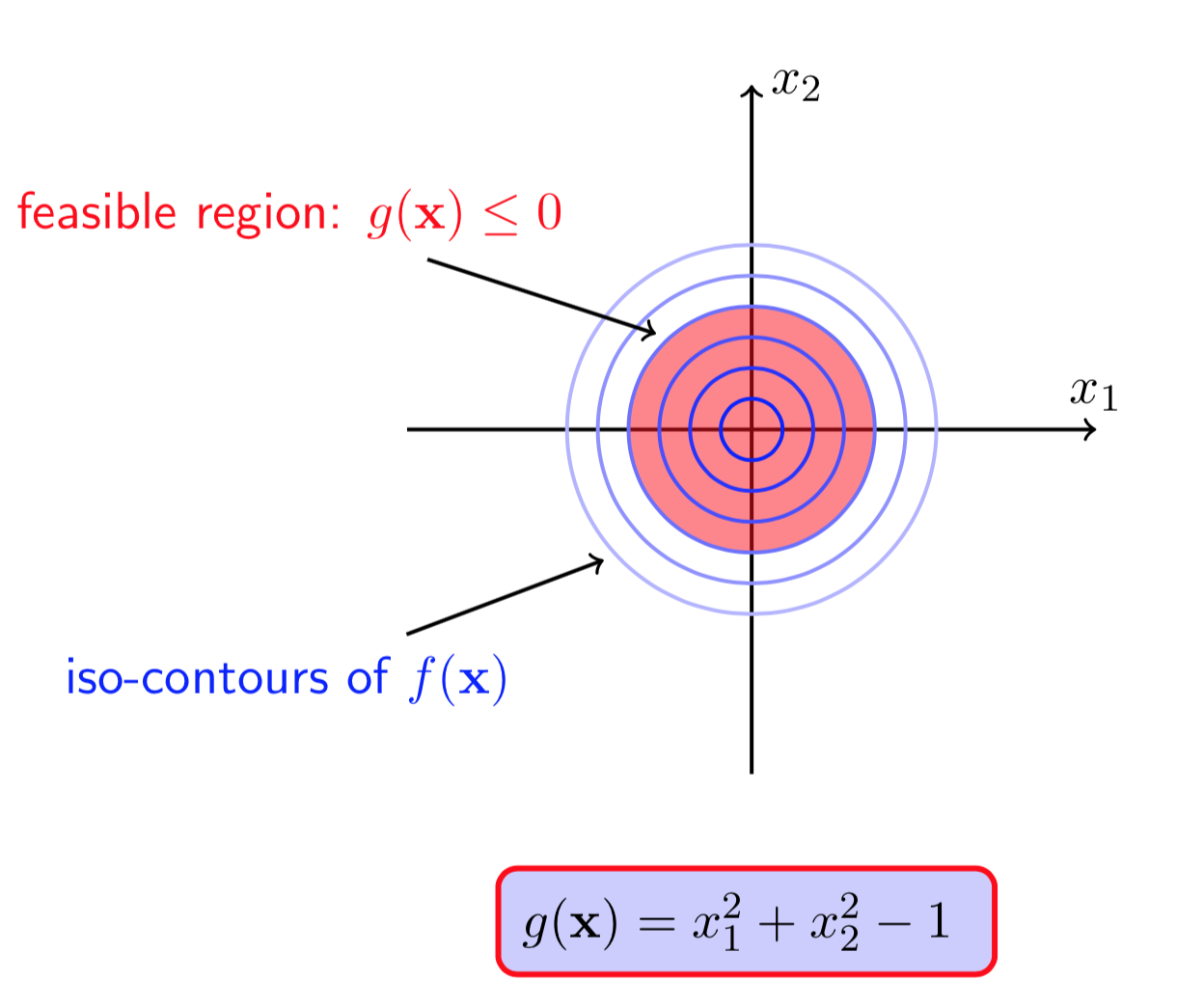
图(7 ) 图(8)
图(7)画出了\(f(X)\)的等高线,并且点\((0,0)\)是一个极小值点,图(8)的红色区域是在\(g(X)\)约束条件下的可行域。从图中可以看出,无论是否有\(g(X)\)的约束,函数\(f(X)\)的极小值点都在\((0,0)\)处,此时我们称该约束未被激活(\(g(X^*)<0\)).现在,如果把目标函数修改成
\]
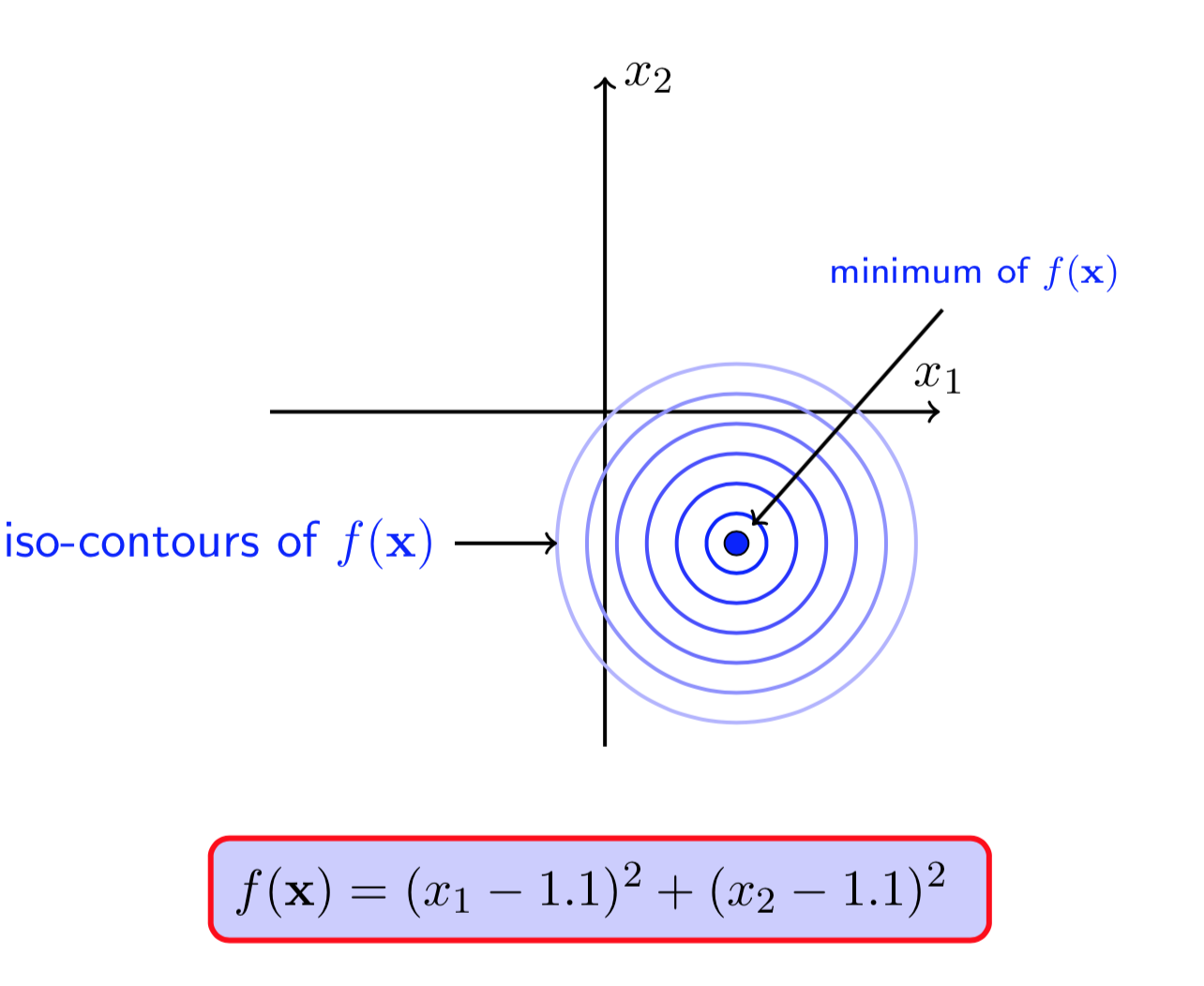
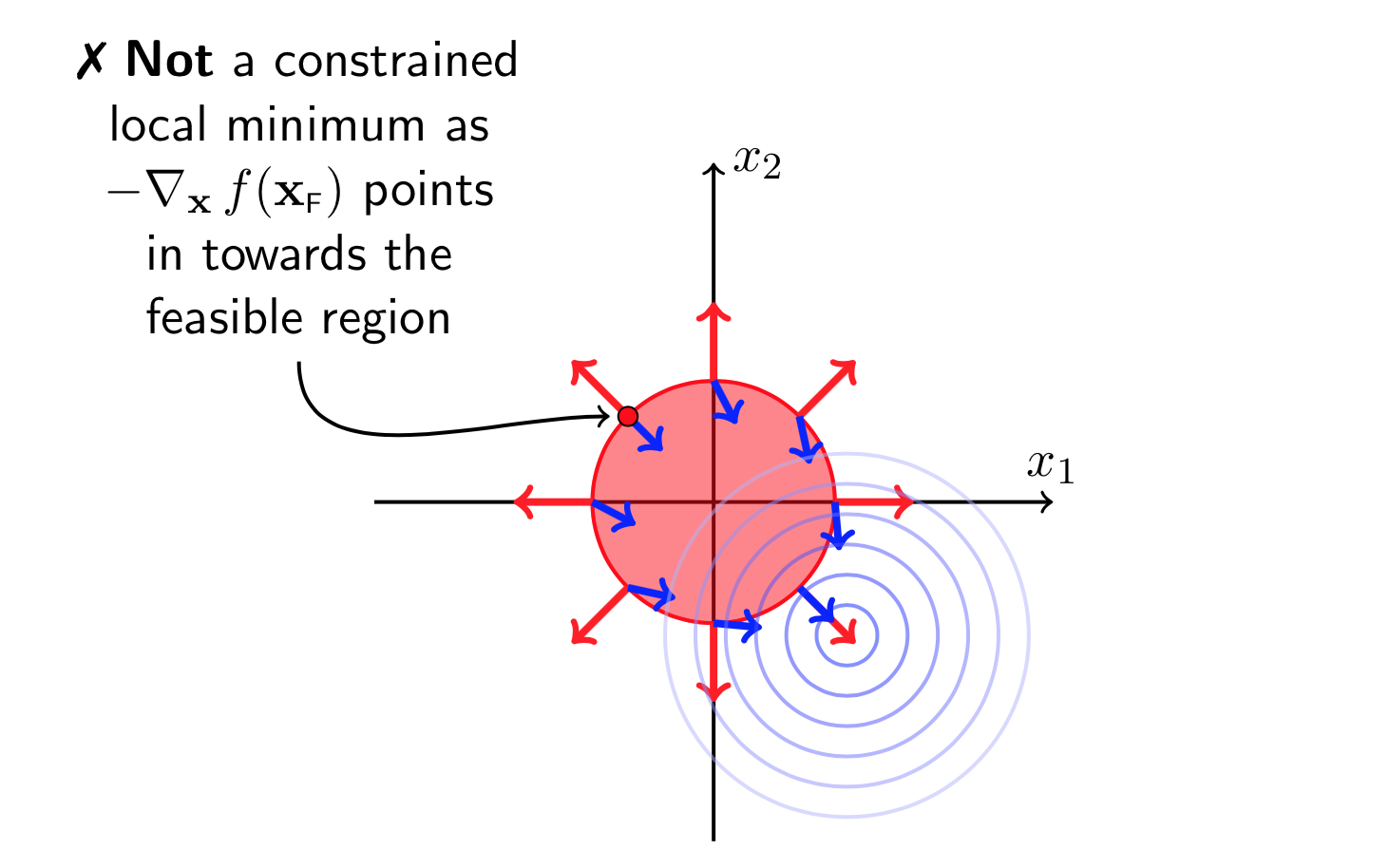
图(9 ) 图(10)
图(9)和(10)显示,\(f(X)\)在无约束条件下的极值点是\((1.1,1.1)\),但是它并不在\(g(X)\leq0\)的可行域中。这种情况下,若\(X^*\)是\(f(X)\)满足约束条件的一个极小值点,那么一定有\(g(X^*)=0\),也即极小值点一定在约束的边界上取得。实际上,此处的不等式约束就变成了等式约束。
图(11)
从图(11)可以看出来,在极小值点处\(-\nabla f(X)\)与\(\nabla g(X)\)的方向是一致的
\]
其实这也不难理解,如果说\(X^*\)是一个极小值点,上面分析知道\(g(X)\leq 0\)被激活,所以\(g(X^*)=0\),如果设从点\(X^*\)出发下一步可行的方向为\(\Delta X\),由于要满足\(g(X^*+\Delta X) \leq 0\),所以
\]
所以下一步的所有可行方向需要满足上述不等式约束,因为\(X^*\)是一个极小值点,也就是说沿着满足上式(1)的\(\Delta X\)的方向,都有$f(X^) \leq f(X^+\Delta X) $,也就是
\]
并且我们知道\(X^*\)一定在\(g(X)=0\)上,通过上一节的等式约束的条件,应有
\]
通过\((1,2,3)\)式可知\(\mu \leq 0\),从而\(\lambda = -\mu \geq 0\).
现在我们来总结一下上面讨论的结果,给出优化问题
\]
如果\(X^*\)是一个极小值点,则可能有一下两种情况:
- Case 1: 无约束条件的极小值点出现在可行域内
- \(g(X^*) < 0\).
- \(\nabla _X f(X^*) = 0\).
- \(\nabla^2 _{XX}f(X)\)是一个正定矩阵.
- Case 2: 无约束条件的极小值点出现在可行域外
- \(g(X^*)=0\).
- \(-\nabla _Xf(X^*) = \lambda \nabla g(X^*) \quad where \quad \lambda > 0\).
- \(Y^T\nabla_{XX}^2L(X^*)Y \geq 0 \quad s.t. \;(\nabla_Xg(X^*))^TY = 0\)
下面,直接引入\(KKT\)条件
\]
定义拉格朗日函数
\]
\(X^*\)是一个局部最小值等价于存在唯一的\(\lambda^*\)满足
- KKT1 . \(\nabla _X L(X^*,\lambda^*)=0\).
- KKT2. \(\lambda ^* \geq 0\).
- KKT3. \(\lambda ^*g(X^*) = 0\).
- KKT4. \(g(X^*) \leq 0\).
- KKT5. 矩阵\(\nabla _{XX}L(X^*,\lambda ^*)\)正定.
上面就是\(KKT\)条件。这些条件其实可以分两种情况
- Case 1: 约束未激活
- 此时\(\lambda ^* = 0,L(X^*,\lambda^*)=f(X^*)\),
- KKT1 \(\Rightarrow \nabla _Xf(X^*)=0\).
- KKT4 \(\Rightarrow X^*\)是一个可行点
- Case 2: 约束被激活
- 此时\(\lambda ^* \geq 0,L(X^*,\lambda^*)=f(X^*)+\lambda ^*g(X^*)\),
- KKT1 \(\Rightarrow \nabla _Xf(X^*) =- \lambda \nabla g(X^*)\).
- KKT3 \(\Rightarrow g(X^*) = 0\).并且\(L(X^*,\lambda^*)=f(X^*)\).
将问题推广到多个不等式约束
\]
定义拉格朗日函数
\]
\(X^*\)是一个局部最小值等价于存在唯一的\(\lambda^*\)满足
- KKT1 . \(\nabla _X L(X^*,\lambda^*)=0\).
- KKT2. \(\lambda _j^* \geq 0\quad j=1,2...,m\).
- KKT3. \(\lambda_j^*g_j(X^*) = 0 \quad j=1,2,...,m\).
- KKT4. \(g_j(X^*) \leq 0 \quad j=1,2,...,m\).
- KKT5. 矩阵\(\nabla _{XX}L(X^*,\lambda ^*)\)正定.
同时存在等式和不等式约束
我们回到最开始的情况,同时存在多个等式约束和多个不等式约束
\]
定义拉格朗日函数
\]
\(X^*\)是一个局部最小值等价于存在唯一的\(\lambda^*\)满足
- KKT1 . \(\nabla _X L(X^*,\mu^*,\lambda^*)=0\).
- KKT2. \(\lambda _j^* \geq 0\quad j=1,2,...,m\).
- KKT3. \(\lambda_j^*g_j(X^*) = 0 \quad j=1,2,...,m\).
- KKT4. \(g_j(X^*) \leq 0 \quad j=1,2,...,m\).
- KKT5. \(h_i(X^*) = 0 \quad i =1,2,...,l\)
- KKT6. 矩阵\(\nabla _{XX}L(X^*,\lambda ^*)\)正定.
下面通过一个例子来加深理解,考虑问题
s.t. \quad x_1+x_2 = 1. \\
x_2 \leq \alpha .
\]
构造拉格朗日函数
\]
KKT方程如下:
x_1+x_2 = 1, \quad \quad\quad\quad\quad\quad\quad\quad\quad\\
x_2 \leq \alpha, \quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\\
\lambda \geq 0, \quad\quad\quad\quad\quad\quad\quad\quad \quad\quad\quad\;\;\\
\lambda(x_2-\alpha) =0.\quad\quad\quad\quad\quad \quad\quad\quad
\]
联立得
\]
- 当\(\alpha \ge 1/2\)时,\(\lambda = 0 \geq 2 -4 \alpha\),此时约束条件未被激活,原问题的最优解为\((x_1,x_2)=(1/2,1/2)\).
- 当\(\alpha < 1/2\)时,\(\lambda = 2 - 4\alpha > 0\),从而\(x_2-\alpha = 0\),即\(x_2=\alpha\),此时约束条件被激活,愿问题最优解为\((x_1,x_2)=(1-\alpha,\alpha)\).
拉格朗日乘法与KKT条件的更多相关文章
- 拉格朗日对偶与kkt条件
- KKT条件的物理意义(转)
最好的解释:https://www.quora.com/What-is-an-intuitive-explanation-of-the-KKT-conditions# 作者:卢健龙链接:https:/ ...
- 带约束优化问题 拉格朗日 对偶问题 KKT条件
转自:七月算法社区http://ask.julyedu.com/question/276 咨询:带约束优化问题 拉格朗日 对偶问题 KKT条件 关注 | 22 ... 咨询下各位,在机器学习相关内容中 ...
- 文本分类学习 (九)SVM入门之拉格朗日和KKT条件
上一篇说到SVM需要求出一个最小的||w|| 以得到最大的几何间隔. 求一个最小的||w|| 我们通常使用 来代替||w||,我们去求解 ||w||2 的最小值.然后在这里我们还忽略了一个条件,那就是 ...
- 机器学习——支持向量机(SVM)之拉格朗日乘子法,KKT条件以及简化版SMO算法分析
SVM有很多实现,现在只关注其中最流行的一种实现,即序列最小优化(Sequential Minimal Optimization,SMO)算法,然后介绍如何使用一种核函数(kernel)的方式将SVM ...
- 【整理】深入理解拉格朗日乘子法(Lagrange Multiplier) 和KKT条件
在求解最优化问题中,拉格朗日乘子法(Lagrange Multiplier)和KKT(Karush Kuhn Tucker)条件是两种最常用的方法.在有等式约束时使用拉格朗日乘子法,在有不等约束时使用 ...
- PRML读书会第七章 Sparse Kernel Machines(支持向量机, support vector machine ,KKT条件,RVM)
主讲人 网神 (新浪微博: @豆角茄子麻酱凉面) 网神(66707180) 18:59:22 大家好,今天一起交流下PRML第7章.第六章核函数里提到,有一类机器学习算法,不是对参数做点估计或求其分 ...
- 关于拉格朗日乘子法和KKT条件
解密SVM系列(一):关于拉格朗日乘子法和KKT条件 标签: svm算法支持向量机 2015-08-17 18:53 1214人阅读 评论(0) 收藏 举报 分类: 模式识别&机器学习(42 ...
- 深入理解拉格朗日乘子法(Lagrange Multiplier) 和KKT条件
[整理] 在求解最优化问题中,拉格朗日乘子法(Lagrange Multiplier)和KKT(Karush Kuhn Tucker)条件是两种最常用的方法.在有等式约束时使用拉格朗日乘子法,在有 ...
随机推荐
- 轮子:读取config.ini文件
python: 把config.ini文件成map返回 def get_conf(conf_file): conf = {} ll=list(map(lambda x: x.replace('&quo ...
- springmvc4.3.7中使用RequestBody,传入json参数时,得到错误415 Unsupported Media Type
在新建一个maven的项目的时候,当时并非springboot项目,是通过xml来配置的项目.在项目中DispatcherServlet的配置文件中配置了annotation-driven的, < ...
- 【leetcode】1187. Make Array Strictly Increasing
题目如下: Given two integer arrays arr1 and arr2, return the minimum number of operations (possibly zero ...
- wx小程序知识点(一)
一.微信小程序中的目录及文件 (1)project.config.json 用于开发者工具配置 主要用于设置项目是否开启https校验(setting.urlCheck) (2) App.js 设置全 ...
- java设置Cookie
public static void setCookie(HttpServletResponse response, String key, String value){ Cookie cookie ...
- JavaScript 内置函数有什么?
javaScript内置函数 1.Date:日期函数 属性:constructor 所修立对象的函数参考prototype 能够为对象加进的属性和方法 方法:getDay() 返回一周中的第几天(0- ...
- CF1101D GCD Counting 点分治+质因数分解
题意:求最长的树上路径点值的 $gcd$ 不为 $1$ 的长度. 由于只要求 $gcd$ 不为一,所以只要 $gcd$ 是一个大于等于 $2$ 的质数的倍数就可以了. 而我们发现 $2\times 1 ...
- 614A - Link/Cut Tree 数乘
A. Link/Cut Tree time limit per test 2 seconds memory limit per test 256 megabytes input standard in ...
- String类型中"=="和"equals"的区别
"=="比较的是两个字符串的内存地址. "equals"比较的是两个字符串的实际值. 例子1. String s1="abc"; Stri ...
- AtCoder4351 Median of Medians 二分, 树状数组
题目大意 定义一个从小到大的数列的中位数为第 $ \frac{n}{2}+1 $ 项.求一个序列的所有连续子序列的中位数的中位数. $ (n \leqslant 100000)$ 问题分析 由于\(n ...