RGB-D显著性突出物体(学习)
论文阅读:Adaptive Fusion for RGB-D Salient Object Detection
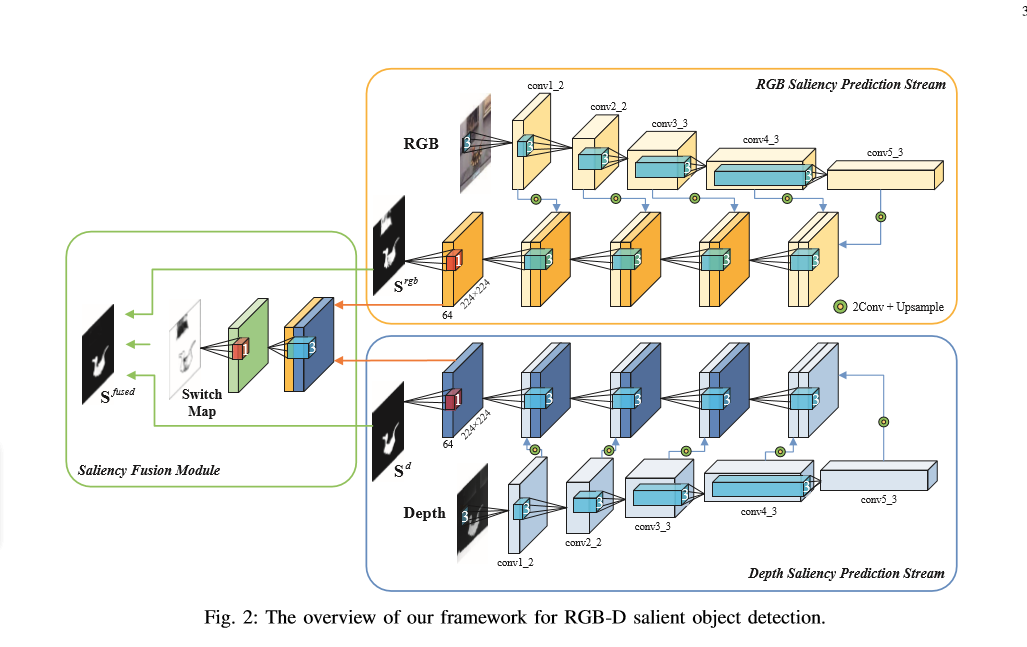
这篇代码的创新点在于使用了SW层,使用SW_logits * img_logits + (1 - SW_logits) * (1 - depth_logits) 来获得最终的预测结果
另外一个关键点是使用了3种loss损失值
第一种损失值,即经过归一化的标签g_t 与 输出的结果logits的sigmoid的损失值
第二种损失值, 即将im_logits进行sigmoid转换为0, 1之间,然后使用sigmoid_im * label + (1 - sigmoid_im) * (1 - label) # 获得标签值与图片值的交叉熵损失值
将计算好的交叉熵损失函数与SW_map 计算-log的交叉熵损失函数,个人认为这个loss存在问题
第三种损失值,即edge_loss即边界的损失值
将预测的结果进行sigmoid操作,转换为(0, 1)
使用tf.reshape(tf.constant([-1, 0, 1], tf.float32), [1, 3, 1, 1]) 构造x方向的边界卷积
使用tf.reshape(x_weight, [3, 1, 1, 1]) # 构造y方向的边界卷积
使用tf.nn.conv2d(g_t, x_weight, [1, 1, 1, 1], 'SAME') 进行标签的x轴方向和y轴方向上的边界卷积
使用tf.nn.conv2d(sigmoid_p, x_weight, [1, 1, 1, 1], 'SAME') 进行预测结果的x轴方向和y轴方向上的边界卷积
最后使用tf.losses.mean_squre_error(xgrad_gt, xgrad_sal) + tf.losses.mean_squre_error(ygrad_gt, ygrad_sal) 获得最终的mse损失函数
论文中的网络结构图
run_saliency.py 用于执行代码
from __future__ import print_function
import tensorflow as tf
import numpy as np
import scipy.misc as misc
import os
import cv2
from net import *
from loss import * FLAGS = tf.flags.FLAGS
tf.flags.DEFINE_string('data_dir', './data/', 'path to dataset')
tf.flags.DEFINE_string('ckpt_file', './model/AF-Net', 'checkpoint file')
tf.flags.DEFINE_string('save_dir', './result', 'path to prediction direction')
tf.flags.DEFINE_string('train_data', './train_data/', 'path to train_data')
IMAGE_SIZE = 224
BATCH_SIZE = 1
train_num = 1500
num_epoch = 1000 def _transform(filename, _channels=True):
image = misc.imread(filename)
if _channels and len(image.shape) < 3:
image = np.array([image for _ in range(3)]) resize_image = misc.imresize(image, [IMAGE_SIZE, IMAGE_SIZE], interp='nearest')
return image def main(argv=None, is_training=True):
image = tf.placeholder(tf.float32, [None, IMAGE_SIZE, IMAGE_SIZE, 3], name='input_image')
depth_2 = tf.placeholder(tf.float32, [None, IMAGE_SIZE, IMAGE_SIZE], name='input_depth')
depth = tf.expand_dims(depth_2, axis=3)
processed_image = image - [123.64, 116.779, 103.939] # 减去最后一个维度的均值
gt_2 = tf.placeholder(tf.float32, [None, IMAGE_SIZE, IMAGE_SIZE], name='label')
gt = tf.expand_dims(gt_2, axis=3)
net_handler = NetHandler()
logits, im_logits, SW_map = net_handler.RGBD_SW_net(processed_image, depth)
pred_annotation = tf.sigmoid(logits) # 将其转换为0, 1
# 构造sal损失值
loss_sal = sigmoid_CEloss(logits, gt)
# 构造SW损失值
loss_sw = SW_loss(im_logits, SW_map, gt)
# 计算边缘损失值
loss_edge = edge_loss(logits, gt)
# 计算总的损失值loss
loss = loss_sal + loss_sw + loss_edge
# 构造损失值的优化器
train_op = tf.train.AdamOptimizer(1e-6, beta1=0.5).minimize(loss)
# 构造执行函数
sess = tf.Session()
# 变量初始化
sess.run(tf.global_variables_initializer())
# 打印保存的参数的地址
print('Rreading params from {}'.format(FLAGS.ckpt_file))
# 如果已经保存了参数就加载
if tf.train.get_checkpoint_state('model'):
saver = tf.train.Saver(None)
saver.restore(sess, FLAGS.ckpt_file)
# 进行图片结果的保存
if not os.path.exists(FLAGS.save_dir):
os.makedirs(FLAGS.save_dir) if is_training == False:
files = os.listdir(os.path.join(FLAGS.data_dir + '/RGB/'))
test_num = len(files)
test_RGB = np.array([_transform(os.path.join(FLAGS.data_dir + '/RGB/' + filename), _channels=True) for filename in files])
# 这里是不对的
test_depth = np.array([np.expand_dims(_transform(os.path.join(FLAGS.data_dir + '/depth/' + filename), _channels=True) for filename in files)]) # 进行测试操作
for k in range(test_num):
# 进行结果的预测,这里结果的范围为0,1之间
test_prediction = sess.run(pred_annotation, feed_dict={image:test_RGB[k], depth:test_depth[k]}) test_origin_RGB = misc.imread(os.path.join(FLAGS.data_dir + '/RGB/' + files[k].split('.')[0] + '.jpg'))
image_shape = test_origin_RGB.shape
# 将图片转换为原来的图片的大小
test_pred = misc.imresize(test_prediction[0, :, :, 0], image_shape, interp='bilinear')
misc.imsave('{}/{}'.format(FLAGS.save_dir, files[k].split('.')[0] + '.jpg'), test_pred.astype(np.uint8)) print('Save results in to %s' % (FLAGS.save_dir)) else:
iter = 0
for epoch in range(num_epoch):
# 载入数据
for i in range(train_num // BATCH_SIZE): deep_img, GT_image, Img_img = read_data_some('train_data.npy', BATCH_SIZE)
_, _loss = sess.run([train_op, loss], feed_dict={image:Img_img, depth_2:deep_img, gt_2:GT_image})
if iter % 100 == 0 and iter != 0:
print('iter', iter, 'loss', _loss) saver = tf.train.Saver()
if epoch % 10 == 0:
saver.save(sess, FLAGS.ckpt_file, write_meta_graph=FLAGS)
test_deep, test_GT, test_RGB = read_data_some('test_data.npy', 1)
test_prediction = sess.run(pred_annotation, feed_dict={image:test_RGB, depth_2:test_deep, gt_2:test_GT}) # 进行图片保存
cv2.imwrite('train_result/deep.png', test_deep)
cv2.imwrite('train_result/GT.png', test_GT)
cv2.imwrite('train_result/RGB.png', test_RGB)
cv2.imwrite('train_result/pred.png', test_prediction) iter += 1 if __name__ == '__main__':
tf.app.run()
net.py 网络结构
import tensorflow as tf
import tensorflow.contrib.slim as slim class NetHandler(object):
def __int__(self,
weights_initializer = tf.contrib.layers.xavier_initializer(),
weight_decay = 0.0001,
padding='SAME'):
self.padding = padding
self.weight_initializer = weights_initializer
self.weight_decay = weight_decay def vgg16_net(self, inputs, depth_suf = ''):
layers = (
'conv1_1', 'relu1_1', 'conv1_2', 'relu1_2', 'pool1', 'conv2_1', 'relu2_1', 'conv2_2', 'relu2_2', 'pool2', 'conv3_1', 'relu3_1', 'conv3_2', 'relu3_2', 'conv3_3',
'relu3_3', 'pool3', 'conv4_1', 'relu4_1', 'conv4_2', 'relu4_2', 'conv4_3', 'relu4_3',
'pool4', 'conv5_1', 'relu5_1', 'conv5_2', 'relu5_2', 'conv5_3', 'relu5_3',
'pool5'
) kernel_size = 3
num_outputs = 64
net = {}
current = inputs # 当前输入
for i, name in enumerate(layers):
if depth_suf == '_d' and i == 0:
current = slim.conv2d(current, 64, [3, 3],
weights_initializer=self.weight_initializer,
padding=self.padding,
stride=1,
activation_fn=None)
net[name] = current
continue kind = name[:4]
if kind == 'conv':
if name[:5] == 'conv1':
num_outputs = 64 # 构造第一个卷积的输出fiter
elif name[:5] == 'conv2':
num_outputs = 128
elif name[:5] == 'conv3':
num_outputs = 256
elif name[:5] == 'conv4':
num_outputs = 512
elif name[:5] == 'conv5':
num_outputs = 512 _, _, _, c = current.get_shape()
kernels = tf.get_variable(name=name + '_w' + depth_suf, shape=[kernel_size, kernel_size, c, num_outputs], initializer=self.weight_initializer,
regularizer=tf.contrib.layers.l2_regularizer(self.weight_decay),
trainable=True)
_, _, _, bias_size = kernels.get_shape()
bias = tf.get_variable(name=name + '_b' + depth_suf, shape=[bias_size],
initializer=tf.zeros_initializer(),
trainable=True)
conv = tf.nn.conv2d(current, kernels, strides=[1, 1, 1, 1], padding=self.padding)
current = tf.nn.bias_add(conv, bias) elif kind == 'relu':
current = tf.nn.relu(current, name=name) elif kind == 'pool':
current = tf.nn.max_pool(current, kernel_size=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding=self.padding)
net[name] = current return net def RGBD_SW_net(self, image, depth):
image_net = self.vgg16_net(image)
depth_net = self.vgg16_net(depth, depth_suf='_d')
conv_5 = image_net['relu5_3'] # 获得第一层到最后一层卷积的结果
conv_4 = image_net['relu4_3']
conv_3 = image_net['relu3_3']
conv_2 = image_net['relu2_2']
conv_1 = image_net['relu1_2'] depth_5 = depth_net['relu5_3']
depth_4 = depth_net['relu4_3']
depth_3 = depth_net['relu3_3']
depth_2 = depth_net['relu2_2']
depth_1 = depth_net['relu1_2'] with slim.arg_scope([slim.conv2d],
weights_initializer=self.weight_initializer,
weight_regularizer=slim.l2_regularizer(self.weight_decay),
padding=self.padding,
stride=1,
activation_fn=tf.nn.relu):
conv5 = slim.repeat(conv_5, 2, slim.conv2d, 64, [3, 3], scope='conv5') # 2表示进行了两次的卷积操作
conv4 = slim.repeat(conv_4, 2, slim.conv2d, 64, [3, 3], scope='conv4') # 进行两次卷积
conv3 = slim.repeat(conv_3, 2, slim.conv2d, 64, [3, 3], scope='conv3') #
conv2 = slim.repeat(conv_2, 2, slim.conv2d, 64, [3, 3], scope='conv2')
conv1 = slim.repeat(conv_1, 2, slim.conv2d, 64, [3, 3], scope='conv1') depth5 = slim.repeat(depth_5, 2, slim.conv2d, 64, [3, 3], scope='depth5')
depth4 = slim.repeat(depth_4, 2, slim.conv2d, 64, [3, 3], scope='depth4')
depth3 = slim.repeat(depth_3, 2, slim.conv2d, 64, [3, 3], scope='depth3')
depth2 = slim.repeat(depth_2, 2, slim.conv2d, 64, [3, 3], scope='depth2')
depth1 = slim.repeat(depth_1, 2, slim.conv2d, 64, [3, 3], scope='depth1') conv5_up = tf.image.resize_images(conv5, [224, 224])
conv4_up = tf.image.resize_images(conv4, [224, 224])
conv3_up = tf.image.resize_images(conv3, [224, 224])
conv2_up = tf.image.resize_images(conv2, [224, 224]) depth5_up = tf.image.resize_images(depth5, [224, 224])
depth4_up = tf.image.resize_images(depth4, [224, 224])
depth3_up = tf.image.resize_images(depth3, [224, 224])
depth2_up = tf.image.resize_images(depth2, [224, 224])
# 将卷积层进行维度变化,卷积后的结果输入到下一层
concat4_im = tf.concat([conv5_up, conv4_up], 3)
feat4_im = slim.conv2d(concat4_im, 64, [3, 3], scope='feat4_im')
concat3_im = tf.concat([feat4_im, conv3_up], 3)
feat3_im = slim.conv2d(concat3_im, 64, [3, 3], scope='feat3_im')
concat2_im = tf.concat([feat3_im, conv2_up], 3)
feat2_im = slim.conv2d(concat2_im, 64, [3, 3], scope='feat2_im')
concat1_im = tf.concat([feat2_im, conv1], 3)
feat1_im = slim.conv2d(concat1_im, 64, [3, 3], scope='feat1_im')
# # 同理对深度图做相同的操作 concat4_d = tf.concat([depth4_up, depth5_up], 3)
feat4_d = slim.conv2d(concat4_d, 64, [3, 3], scope='feat4_d')
concat3_d = tf.concat([feat4_d, depth3])
feat3_d = slim.conv2d(concat3_d, 64, [3, 3], scope='feat3_d')
concat2_d = tf.concat([feat3_d, depth2])
feat2_d = slim.conv2d(concat2_d, 64, [3, 3], scope='feat2_d')
concat1_d = tf.concat([feat2_d, depth])
feat1_d = slim.conv2d(concat1_d, 64, [3, 3], scope='feat1_d') # 进行1*1的卷积, 时期维度变化为1
conv1_im_logits = slim.conv2d(feat1_im, 1, [1, 1], activation_fn=None, scope='conv1_im_logits')
conv1_d_logits = slim.conv2d(feat1_d, 1, [1, 1], activation_fn=None, scope='conv1_d_logits')
# 将图像卷积图与深度卷积图合并
feat1 = slim.conv2d(tf.concat([feat1_im, feat1_d], 3), 64, [3, 3], scope='feat1')
SW_map = tf.nn.sigmoid(slim.conv2d(feat1, 1, [1, 1], activation_fn=None, scope='feat1_attn')) conv1_fused_logits = SW_map * conv1_im_logits + (1 - SW_map) * conv1_d_logits return conv1_fused_logits, conv1_im_logits, SW_map
loss.py 定义的损失值
import tensorflow as tf def sigmoid_CEloss(logits, gt):
loss = tf.reduce_mean(
tf.nn.sigmoid_cross_entropy_with_logits(logits=logits, labels=tf.cast(gt, tf.float32))
) def SW_loss(im_logits, SW_map, gt): label = tf.cast(gt, tf.float32)
sigmoid_im = tf.nn.sigmoid(im_logits)
SW_gt = label * sigmoid_im + (1 - label) * (1 - sigmoid_im)
cost = -SW_gt * tf.log(tf.clip_by_value(SW_map, 1e-8, 1.0)) \
- (1 - SW_gt) * tf.log(tf.clip_by_value(1 - SW_map, 1e-8, 1.0)) return tf.reduce_mean(cost) # 边缘轮廓的损失值
def edge_loss(logits, gt):
gt = tf.cast(gt, tf.float32)
sigmoid_p = tf.nn.sigmoid(logits)
x_weight = tf.reshape(tf.constant([-1, 0, +1], tf.float32), [1, 3, 1, 1]) # 构造了一个卷积核
y_weight = tf.reshape(x_weight, [3, 1, 1, 1]) # 构造了卷积核
# 获得其标签边缘的梯度值,获得x边缘的损失值
xgrad_gt = tf.nn.conv2d(gt, x_weight, [1, 1, 1, 1], 'SAME')
ygrad_gt = tf.nn.conv2d(gt, y_weight, [1, 1, 1, 1], 'SAME')
# 获得输出结果的边缘梯度值
xgrad_sal = tf.nn.conv2d(sigmoid_p, x_weight, [1, 1, 1, 1], 'SAME')
ygrad_sal = tf.nn.conv2d(sigmoid_p, y_weight, [1, 1, 1, 1], 'SAME')
# 计算平方根误差
loss = tf.losses.mean_squared_error(xgrad_gt, xgrad_sal) + tf.losses.mean_squared_error(ygrad_gt, ygrad_sal) return loss
read_data 读取一个batch_size的数据
import numpy as np
import cv2 def read_data_some(path, bacth_size): data = np.array(np.load('npy/' + path))
num = len(data)
indx = np.random.randint(0, num, bacth_size)
deep_img, GT_img, Img_imgs = data[indx][:, 0], data[indx][:, 1], data[indx][:, 2]
deep_imgs = []
GT_imgs = []
for i in range(bacth_size):
deep_imgs.append(cv2.cvtColor(deep_img[i], cv2.COLOR_BGR2GRAY))
GT_imgs.append(cv2.cvtColor(GT_img[i], cv2.COLOR_BGR2GRAY)) return deep_imgs, GT_imgs, Img_imgs if __name__ == '__main__': read_train_data(64)
save_data 保存数据为.npy
import random
import os
import cv2
import numpy as np
import glob def save_data(path): data = [] for root, dirs, files in os.walk(path):
if len(dirs) != 0: file_names = glob.glob(path + dirs[0] + '/*.png')
for deep_name in file_names:
GT_name = deep_name.replace('deep', 'GT')
Img_name = deep_name.replace('deep', 'Img').replace('png', 'jpg')
# 图片的读取
deep_img = cv2.imread(deep_name)
deep_img = cv2.resize(deep_img, (224, 224))
GT_img = cv2.imread(GT_name)
GT_img = cv2.resize(GT_img, (224, 224))
Img_img = cv2.imread(Img_name)
Img_img = cv2.resize(Img_img, (224, 224))
data.append((deep_img, GT_img, Img_img)) # 进行数据的清洗
random.shuffle(data) np.save('npy/' + path[:-1] + '.npy', data)
RGB-D显著性突出物体(学习)的更多相关文章
- V-rep学习笔记:视觉传感器2
视觉传感器的属性设置栏中还有如下几个选项: Ignore RGB info (faster): if selected, the RGB information of the sensor (i.e. ...
- Python学习day45-数据库(总结)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
- Python学习day44-数据库(单表及多表查询)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
- Python学习day43-数据库(多表关系)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
- Python学习day42-数据库的基本操作(1)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
- Python学习day41-数据库(1)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
- Python学习day40-并发编程(终)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
- Python学习day39-并发编程(各种锁)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
- Python学习day38-并发编程(线程)
figure:last-child { margin-bottom: 0.5rem; } #write ol, #write ul { position: relative; } img { max- ...
随机推荐
- new Date,Date.parse()传值
获取时间: 获取1997年10月1号日期 new Date: 当使用 - 拼接年月日时将会使用UTC时区解析参数,会比北京时间快八小时. 当时用 / 拼接年月日时会使用北京的时区去解析参数,取到的是北 ...
- ubuntu - 如何以root身份使用图形界面管理文件?
nautilus 是gnome的文件管理器,但是如果不是root账号下,权限受限,我们可以通过以下方式以root权限使用! 一,快捷键“ctrl+alt+t”,调出shell. 二,在shell中输入 ...
- SecureCRT 连接 Centos7.0 (桥接模式),且能连接公网。
1.查看本地网络信息 ip:172.20.10.7 2.在VMware下配置Centos为桥接模式: 3.在Centos命令行输入 ip addr 查看Centos的mac地址 网口:eno16777 ...
- 终极之战:Linux & Windows
1.开源 当你买了一辆车,但你看不到引擎盖下面是什么?当你使用Windows驱动系统时就是如此.但是,相比之下,Linux完全是一个开源项目.你可以看看Linux操作系统的源代码,这是一个优点.Lin ...
- AIX 下的 find 命令使用
平常我们使用 find , -size +100M/K/G ,就可以找到相应大小的文件了. 可是 AIX 平台下,却好像不能使用,虽然执行起来不报错,但是查找出来的文件却并不是我们想要的.所以 m ...
- docker查看容器IP地址
docker inspect 容器名称或 id 命令:docker inspect redismaster 结果:
- Gym - 101173H Hangar Hurdles (kruskal重构树/最小生成树+LCA)
题目大意:给出一个n*n的矩阵,有一些点是障碍,给出Q组询问,每组询问求两点间能通过的最大正方形宽度. 首先需要求出以每个点(i,j)为中心的最大正方形宽度mxl[i][j],可以用二维前缀和+二分或 ...
- jar is not a valid DFS filename
- Python的语句---钱中平
python中的两种语句:1.if条件控制语句 格式: if: a = int(input("请输入第一个数:"))b = int(input("请输入第二个数:&quo ...
- jquery timeStamp属性 语法
jquery timeStamp属性 语法 作用:timeStamp 属性包含从 1970 年 1 月 1 日到事件被触发时的毫秒数.直线模组 语法:event.timeStam 参数: 参数 描述 ...