一步步写STM32 OS【四】OS基本框架
一、上篇回顾
上一篇文章中,我们完成了两个任务使用PendSV实现了互相切换的功能,下面我们接着其思路往下做。这次我们完成OS基本框架,即实现一个非抢占式(已经调度的进程执行完成,然后根据优先级调度等待的进程)的任务调度系统,至于抢占式的,就留给大家思考了。上次代码中Task_Switch实现了两个任务的切换,代码如下:
void Task_Switch()
{
if(g_OS_Tcb_CurP == &TCB_1)
g_OS_Tcb_HighRdyP=&TCB_2;
else
g_OS_Tcb_HighRdyP=&TCB_1;
OSCtxSw();
}
我们把要切换任务指针付给跟_OS_Tcb_HighRdyP,然后调用OSCtxSw触发PendSV异常,就实现了任务的切换。如果是多个任务,我们只需找出就绪任务中优先级最大的切换之即可。
二、添加任务调度功能
为了实现这一目标我们至少需要知道任务的状态和时间等数据。我们定义了一个任务状态枚举类型OS_TASK_STA,方便添加修改状态。在OS_TCB结构体中添加了两个成员TimeDly和State,TimeDly是为了实现OS_TimeDly,至于State与优先级一起是作为任务切换的依据。
typedef enum OS_TASK_STA
{
TASK_READY,
TASK_DELAY,
} OS_TASK_STA; typedef struct OS_TCB
{
OS_STK *StkAddr;
OS_U32 TimeDly;
OS_TASK_STA State;
}OS_TCB,*OS_TCBP;
说到任务切换,我们必须面对临界区的问题,在一些临界的代码两端不加临界区进去和退出代码,会出现许多意想不到的问题。以下地方需要特别注意,对关键的全局变量的写操作、对任务控制块的操作等。进入临界区和退出临界区需要关闭和开启中断,我们采用uCOS中的一部分代码:
PUBLIC OS_CPU_SR_Save
PUBLIC OS_CPU_SR_Restore OS_CPU_SR_Save
MRS R0, PRIMASK
CPSID I
BX LR OS_CPU_SR_Restore
MSR PRIMASK, R0
BX LR
#define OS_USE_CRITICAL OS_U32 cpu_sr;
#define OS_ENTER_CRITICAL() {cpu_sr = OS_CPU_SR_Save();}
#define OS_EXIT_CRITICAL() {OS_CPU_SR_Restore(cpu_sr);}
#define OS_PendSV_Trigger() OSCtxSw()
一个OS至少要有任务表,我们可以用数组,当然也可以用链表。为了简单,我们使用数组,使用数组下表作为优先级。当然,必要的地方一定要做数组越界检查。
#define OS_TASK_MAX_NUM 32
OS_TCBP OS_TCB_TABLE[OS_TASK_MAX_NUM];
为了使OS更完整,我们定义几个全局变量,OS_TimeTick记录系统时间,g_Prio_Cur记录当前运行的任务优先级,g_Prio_HighRdy记录任务调度后就绪任务中的最高优先级。
OS_U32 OS_TimeTick;
OS_U8 g_Prio_Cur;
OS_U8 g_Prio_HighRdy;
下面三个函数与PendSV一起实现了任务的调度功能。
OS_Task_Switch函数功能:找出已就绪最高优先级的任务,并将其TCB指针赋值给g_OS_Tcb_HighRdyP,将其优先级赋值g_Prio_HighRdy。注意其中使用了临界区。
void OS_Task_Switch(void)
{
OS_S32 i;
OS_TCBP tcb_p;
OS_USE_CRITICAL
for(i=0;i<OS_TASK_MAX_NUM;i++)
{
tcb_p=OS_TCB_TABLE[i];
if(tcb_p == NULL) continue;
if(tcb_p->State==TASK_READY) break;
}
OS_ENTER_CRITICAL();
g_OS_Tcb_HighRdyP=tcb_p;
g_Prio_HighRdy=i;
OS_EXIT_CRITICAL();
}
OS_TimeDly至当前任务为延时状态,并将延时时间赋值给当前TCB的TimeDly成员,并调用OS_Task_Switch函数,然后触发PendSV进行上下文切换。OS_Task_Switch找到就绪状态中优先级最高的,并将其赋值相关全局变量,作为上下文切换的依据。
void OS_TimeDly(OS_U32 ticks)
{
OS_USE_CRITICAL OS_ENTER_CRITICAL();
g_OS_Tcb_CurP->State=TASK_DELAY;
g_OS_Tcb_CurP->TimeDly=ticks;
OS_EXIT_CRITICAL();
OS_Task_Switch();
OS_PendSV_Trigger();
}
SysTick_Handler实现系统计时,并遍历任务表,任务若是延时状态,就令其延时值减一,若减完后为零,就将其置为就绪状态。
void SysTick_Handler(void)
{
OS_TCBP tcb_p;
OS_S32 i;
OS_USE_CRITICAL OS_ENTER_CRITICAL();
++OS_TimeTick;
for(i=0;i<OS_TASK_MAX_NUM;i++)
{
tcb_p=OS_TCB_TABLE[i];
if(tcb_p == NULL) continue;
if(tcb_p->State==TASK_DELAY)
{
--tcb_p->TimeDly;
if(tcb_p->TimeDly == 0)
tcb_p->State=TASK_READY;
}
}
OS_EXIT_CRITICAL();
}
当所有任务都没就绪怎么办?这时就需要空闲任务了,我们把它设为优先级最低的任务。WFE指令为休眠指令,当来中断时,退出休眠,然后看看有没有已就绪的任务,有则调度之,否则继续休眠,这样可以减小功耗哦。
void OS_Task_Idle(void)
{
while(1)
{
asm("WFE");
OS_Task_Switch();
OS_PendSV_Trigger();
}
}
当一个任务只运行一次时(例如下面main.c的task1),结束时就会调用OS_Task_End函数,此函数会调用OS_Task_Delete函数从任务表中删除当前的任务,然后调度任务。
void OS_Task_Delete(OS_U8 prio)
{
if(prio >= OS_TASK_MAX_NUM) return;
OS_TCB_TABLE[prio]=0;
} void OS_Task_End(void)
{
printf("Task of Prio %d End\n",g_Prio_Cur);
OS_Task_Delete(g_Prio_Cur);
OS_Task_Switch();
OS_PendSV_Trigger();
}
三、OS实战
下面是完整的main.c代码:
#include "stdio.h"
#include "stm32f4xx.h" #define OS_EXCEPT_STK_SIZE 1024
#define TASK_1_STK_SIZE 128
#define TASK_2_STK_SIZE 128
#define TASK_3_STK_SIZE 128 #define TASK_IDLE_STK_SIZE 1024
#define OS_TASK_MAX_NUM 32
#define OS_TICKS_PER_SECOND 1000 #define OS_USE_CRITICAL OS_U32 cpu_sr;
#define OS_ENTER_CRITICAL() {cpu_sr = OS_CPU_SR_Save();}
#define OS_EXIT_CRITICAL() {OS_CPU_SR_Restore(cpu_sr);}
#define OS_PendSV_Trigger() OSCtxSw() typedef signed char OS_S8;
typedef signed short OS_S16;
typedef signed int OS_S32;
typedef unsigned char OS_U8;
typedef unsigned short OS_U16;
typedef unsigned int OS_U32;
typedef unsigned int OS_STK; typedef void (*OS_TASK)(void); typedef enum OS_TASK_STA
{
TASK_READY,
TASK_DELAY,
} OS_TASK_STA; typedef struct OS_TCB
{
OS_STK *StkAddr;
OS_U32 TimeDly;
OS_U8 State;
}OS_TCB,*OS_TCBP; OS_TCBP OS_TCB_TABLE[OS_TASK_MAX_NUM];
OS_TCBP g_OS_Tcb_CurP;
OS_TCBP g_OS_Tcb_HighRdyP;
OS_U32 OS_TimeTick;
OS_U8 g_Prio_Cur;
OS_U8 g_Prio_HighRdy; static OS_STK OS_CPU_ExceptStk[OS_EXCEPT_STK_SIZE];
OS_STK *g_OS_CPU_ExceptStkBase; static OS_TCB TCB_1;
static OS_TCB TCB_2;
static OS_TCB TCB_3;
static OS_TCB TCB_IDLE;
static OS_STK TASK_1_STK[TASK_1_STK_SIZE];
static OS_STK TASK_2_STK[TASK_2_STK_SIZE];
static OS_STK TASK_3_STK[TASK_3_STK_SIZE];
static OS_STK TASK_IDLE_STK[TASK_IDLE_STK_SIZE]; extern OS_U32 SystemCoreClock; extern void OSStart_Asm(void);
extern void OSCtxSw(void);
extern OS_U32 OS_CPU_SR_Save(void);
extern void OS_CPU_SR_Restore(OS_U32); void task_1(void);
void task_2(void);
void task_3(void); void OS_Task_Idle(void);
void OS_TimeDly(OS_U32);
void OS_Task_Switch(void);
void OS_Task_Create(OS_TCB *,OS_TASK,OS_STK *,OS_U8);
void OS_Task_Delete(OS_U8);
void OS_Task_End(void);
void OS_Init(void);
void OS_Start(void); void task_1(void)
{
printf("[%d]Task 1 Runing!!!\n",OS_TimeTick); OS_Task_Create(&TCB_2,task_2,&TASK_2_STK[TASK_2_STK_SIZE-1],5);
OS_Task_Create(&TCB_3,task_3,&TASK_3_STK[TASK_3_STK_SIZE-1],7);
} void task_2(void)
{
while(1)
{
printf("[%d]Task 2 Runing!!!\n",OS_TimeTick);
OS_TimeDly(1000);
}
} void task_3(void)
{
while(1)
{
printf("[%d]Task 3 Runing!!!\n",OS_TimeTick);
OS_TimeDly(1500);
}
} void OS_Task_Idle(void)
{
while(1)
{
asm("WFE");
OS_Task_Switch();
OS_PendSV_Trigger();
}
} void OS_TimeDly(OS_U32 ticks)
{
OS_USE_CRITICAL OS_ENTER_CRITICAL();
g_OS_Tcb_CurP->State=TASK_DELAY;
g_OS_Tcb_CurP->TimeDly=ticks;
OS_EXIT_CRITICAL();
OS_Task_Switch();
OS_PendSV_Trigger();
} void OS_Task_Switch(void)
{
OS_S32 i;
OS_TCBP tcb_p;
OS_USE_CRITICAL
for(i=0;i<OS_TASK_MAX_NUM;i++)
{
tcb_p=OS_TCB_TABLE[i];
if(tcb_p == NULL) continue;
if(tcb_p->State==TASK_READY) break;
}
OS_ENTER_CRITICAL();
g_OS_Tcb_HighRdyP=tcb_p;
g_Prio_HighRdy=i;
OS_EXIT_CRITICAL();
} void OS_Task_Delete(OS_U8 prio)
{
if(prio >= OS_TASK_MAX_NUM) return;
OS_TCB_TABLE[prio]=0;
} void OS_Task_End(void)
{
printf("Task of Prio %d End\n",g_Prio_Cur);
OS_Task_Delete(g_Prio_Cur);
OS_Task_Switch();
OS_PendSV_Trigger();
} void OS_Task_Create(OS_TCB *tcb,OS_TASK task,OS_STK *stk,OS_U8 prio)
{
OS_USE_CRITICAL
OS_STK *p_stk;
if(prio >= OS_TASK_MAX_NUM) return; OS_ENTER_CRITICAL(); p_stk = stk;
p_stk = (OS_STK *)((OS_STK)(p_stk) & 0xFFFFFFF8u); *(--p_stk) = (OS_STK)0x01000000uL; //xPSR
*(--p_stk) = (OS_STK)task; // Entry Point
*(--p_stk) = (OS_STK)OS_Task_End; // R14 (LR)
*(--p_stk) = (OS_STK)0x12121212uL; // R12
*(--p_stk) = (OS_STK)0x03030303uL; // R3
*(--p_stk) = (OS_STK)0x02020202uL; // R2
*(--p_stk) = (OS_STK)0x01010101uL; // R1
*(--p_stk) = (OS_STK)0x00000000u; // R0 *(--p_stk) = (OS_STK)0x11111111uL; // R11
*(--p_stk) = (OS_STK)0x10101010uL; // R10
*(--p_stk) = (OS_STK)0x09090909uL; // R9
*(--p_stk) = (OS_STK)0x08080808uL; // R8
*(--p_stk) = (OS_STK)0x07070707uL; // R7
*(--p_stk) = (OS_STK)0x06060606uL; // R6
*(--p_stk) = (OS_STK)0x05050505uL; // R5
*(--p_stk) = (OS_STK)0x04040404uL; // R4 tcb->StkAddr=p_stk;
tcb->TimeDly=0;
tcb->State=TASK_READY;
OS_TCB_TABLE[prio]=tcb; OS_EXIT_CRITICAL();
} void SysTick_Handler(void)
{ OS_TCBP tcb_p;
OS_S32 i;
OS_USE_CRITICAL OS_ENTER_CRITICAL();
++OS_TimeTick;
for(i=0;i<OS_TASK_MAX_NUM;i++)
{
tcb_p=OS_TCB_TABLE[i];
if(tcb_p == NULL) continue;
if(tcb_p->State==TASK_DELAY)
{
--tcb_p->TimeDly;
if(tcb_p->TimeDly == 0)
tcb_p->State=TASK_READY;
}
}
OS_EXIT_CRITICAL();
} void OS_Init(void)
{
int i;
g_OS_CPU_ExceptStkBase = OS_CPU_ExceptStk + OS_EXCEPT_STK_SIZE - 1;
asm("CPSID I");
for(i=0;i<OS_TASK_MAX_NUM;i++)
OS_TCB_TABLE[i]=0;
OS_TimeTick=0;
OS_Task_Create(&TCB_IDLE,OS_Task_Idle,&TASK_IDLE_STK[TASK_IDLE_STK_SIZE-1],OS_TASK_MAX_NUM-1);
} void OS_Start(void)
{
OS_Task_Switch();
SystemCoreClockUpdate();
SysTick_Config(SystemCoreClock/OS_TICKS_PER_SECOND);
OSStart_Asm();
} int main()
{ OS_Init();
OS_Task_Create(&TCB_1,task_1,&TASK_1_STK[TASK_1_STK_SIZE-1],2);
OS_Start(); return 0;
}
os_port.asm变化不大,具体内容可以下载文章末尾提供的工程参考。
老规矩,下载调试,全速运行,观察Terminal IO窗口:
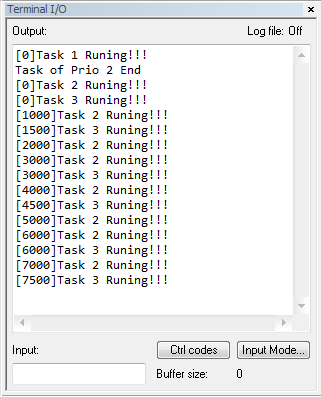
从输出来看,我们已经完成了目标。但不保证稳定性,可能有不少Bugs。至此,可以说其实写一个OS并不难,难的是写一个稳定安全高效的OS。所以,现在只是走了一小步,想要完成一个成熟的OS,还需要不断测试,不断优化。例如,我们采用数组存储任务表,也可以采用链表,各有优缺点。我们只有一个任务表,也可以分成多个表,例如就续表,等待表等等。我们的任务调度部分运行时间不确定,对于实时OS,这是不可以的,怎么修改呢,例如像uCOS的查找表法那样。现在我们的系统只能创建并调度任务,还未加入其他功能,例如信号量、邮箱、队列、内存管理等。其实到了这里,大家完全可以发挥自己的创造力,参照本文开发自己的OS。如果以后有时间的话,还会再写几篇文章继续完善我们的OS。
四、工程下载
一步步写STM32 OS【四】OS基本框架的更多相关文章
- 一步步写STM32 OS【一】 序言
一直想写个类似uCOS的OS,近段时间考研复习之余忙里偷闲,总算有点成果了.言归正传,我觉得OS最难的部分首先便是上下文切换的问题,他和MCU的架构有关,所以对于不同的MCU,这部分需要移植.一旦这个 ...
- 一步步写STM32 OS【三】PendSV与堆栈操作
一.什么是PendSV PendSV是可悬起异常,如果我们把它配置最低优先级,那么如果同时有多个异常被触发,它会在其他异常执行完毕后再执行,而且任何异常都可以中断它.更详细的内容在<Cortex ...
- 一步步写STM32 OS【二】环境搭建
一.安装IAR for ARM6.5 二.新建工程 1.选择处理器:STM32F407VG,暂不使用FPU 2.必要的路径配置和宏定义 3.使用SWO重定向IO输出 4.使用ST-LINK仿真器 5. ...
- 基于Linux的kfifo移植到STM32(支持os的互斥访问)
基于Linux的kfifo移植到STM32(支持os的互斥访问) 关于kfifo kfifo是内核里面的一个First In First Out数据结构,它采用环形循环队列的数据结构来实现:它提供一个 ...
- 一个人写的操作系统 - Sparrow OS
一个人写的操作系统 - Sparrow OS 自己写一个操作系统,这是在过去的几年里我一直为之努力的目标,现在终于完成了. 缘起 自己动手写操作系统的动机最初来自于学习Linux遇到的困难. 我是一个 ...
- 常见模块(四) os模块
注: os模块是实现python程序对操作系统(operation system)的操作 1.对文件或者目录进行删除或者创建的相关操作 # os.rename("b"," ...
- os模块,os.path模块,subprocess模块,configparser模块,shutil模块
1.os模块 os表示操作系统该模块主要用来处理与操作系统相关的操作最常用的文件操作打开 读入 写入 删除 复制 重命名 os.getcwd() 获取当前执行文件所在的文件夹路径os.chdir(&q ...
- Android自定义View的实现方法,带你一步步深入了解View(四)
转载请注明出处:http://blog.csdn.net/guolin_blog/article/details/17357967 不知不觉中,带你一步步深入了解View系列的文章已经写到第四篇了,回 ...
- 【转】Android自定义View的实现方法,带你一步步深入了解View(四)
原文网址: 转载请注明出处:http://blog.csdn.net/guolin_blog/article/details/17357967 不知不觉中,带你一步步深入了解View系列的文章已经写到 ...
随机推荐
- Sheepdog HTTP API
1.sheepdog中http simple storage中nginx后台配置文件模板留存: events { worker_connections 1024;} http { server { l ...
- busbox编译出错,arm-linux-未找到命令
1.问题:/opt/FriendlyARM/mini6410/linux/busybox-1.17.2/scripts/gcc-version.sh: 行 11: arm-linux-gcc: 未找到 ...
- android的liveview装载数据
设置布局 <?xml version="1.0" encoding="utf-8"?> <RelativeLayout xmlns:andro ...
- [CSS]font- 属性
所有浏览器都支持 font 属性. 注释:任何的版本的 Internet Explorer (包括 IE8)都不支持属性值 "inherit". 定义和用法 font 简写属性在一 ...
- Visual C++ 对话框增加菜单栏
1.添加菜单资源 在resourceview视图中右击选择insert,添加一个菜单资源IDR_MENU1,同时设定好响应的菜单项,例 如: 菜单1 ...
- 第四章 Web表单
4.1 跨站请求伪造保护 安装flask-wtf app = Flask(__name__) app.config['SECRET_KEY'] = 'hard to guess string' 密钥不 ...
- sjtu1364 countcountcount
Description 我有一个元素个数为\(n\)的整数数组\(a\)和\(Q\)个问题,每个问题有\(x,y\)两个参数,我要数有多少个整数\(K\)满足\(K\)在\(a[x]-a[y]\)中出 ...
- Dynamic Programming (DP) 问题总结
所有的 DP 问题都可以简单得用 Recursion 的方式实现.这通常是最容易想到的思路. 问题是这种实现不够 efficient,存在 subproblem 被重复计算的情况.有两种解决这个问题的 ...
- [转载]MongoDB 常用命令
mongodb由C++编写,其名字来自humongous这个单词的中间部分,从名字可见其野心所在就是海量数据的处理.关于它的一个最简洁描述为:scalable, high-performance, o ...
- Codeforces Round #210
A:简单题: #include<cstdio> using namespace std; int n,k; int main() { scanf("%d%d",& ...