目标检测 — one-stage检测(二)
one-stage检测算法,其不需要region proposal阶段,直接产生物体的类别概率和位置坐标值,经过单次检测即可直接得到最终的检测结果,因此有着更快的检测速度,比较典型的算法如YOLO,SSD,Retina-Net。
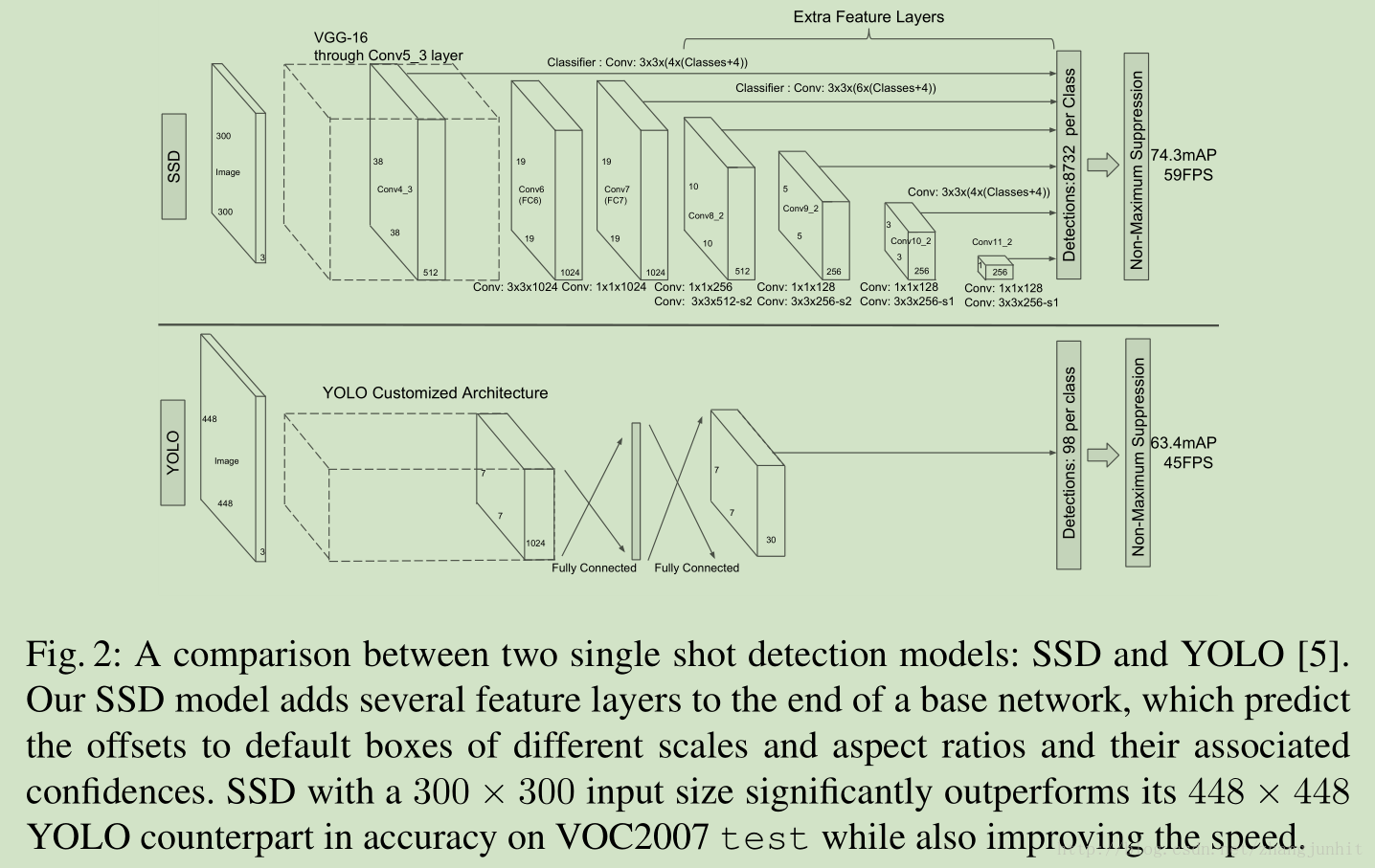
4、SSD(2016)
SSD结合了YOLO中的回归思想和Faster-RCNN中的Anchor机制,使用全图各个位置的多尺度区域特征进行回归,既保持了YOLO速度快的特性,也保证了窗口预测的跟Faster-RCNN一样比较精准。
SSD的核心是在特征图上采用卷积核来预测一系列Default Bounding Boxes的类别、坐标偏移。为了提高检测准确率,SSD在不同尺度的特征图(5个)上进行预测。
模型设计:
(1)采用多尺度特征图用于检测
所谓多尺度采用大小不同的特征图,CNN网络一般前面的特征图比较大,后面会逐渐采用stride=2的卷积或者pool来降低特征图大小,利用多个尺度图来做检测,比较大的特征图来用来检测相对较小的目标,而小的特征图负责检测大目标。
(2)采用卷积进行检测
SSD直接采用卷积对不同的特征图来进行提取检测结果。对于形状为m*m*p的特征图,只需要采用 3*3* p这样比较小的卷积核得到检测值。减少参数量。
(3)设置先验框
SSD借鉴了Faster R-CNN中anchor的理念,每个单元设置尺度或者长宽比不同的先验框,预测的边界框(bounding boxes)是以这些先验框为基准的,在一定程度上减少训练难度。
训练技巧:
(1)先验框匹配
在训练过程中,首先要确定训练图片中的ground truth(真实目标)与哪个先验框来进行匹配,与之匹配的先验框所对应的边界框将负责预测它。
SSD的先验框与ground truth的匹配原则主要有两点。首先,对于图片中每个ground truth,找到与其IOU最大的先验框,该先验框与其匹配。第二个原则是:对于剩余的未匹配先验框,若某个ground truth的 大于某个阈值(一般是0.5),那么该先验框也与这个ground truth进行匹配。
为了保证正负样本尽量平衡,SSD采用了hard negative mining,就是对负样本进行抽样,抽样时按照置信度误差(预测背景的置信度越小,误差越大)进行降序排列,选取误差的较大的top-k作为训练的负样本,以保证正负样本比例接近1:3。
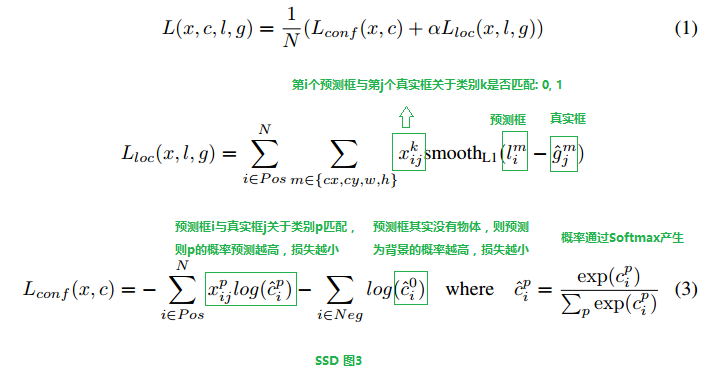
(2)损失函数
与Faster-RCNN中的RPN是一样的,不过RPN是预测Box里面有Object或者没有,没有分类,SSD直接用的Softmax分类。Location的损失,还是一样,都是用Predict box和Default Box/Anchor的差 与Ground Truth Box和Default Box/Anchor的差进行对比,求损失。
损失函数定义为位置误差(locatization loss, loc)与置信度误差(confidence loss, conf)的加权和。对于位置误差,其采用Smooth L1 loss,对于置信度误差,其采用softmax loss。

(3)对每一张特征图,按照不同的大小(Scale) 和长宽比(Ratio)生成生成k个默认框(Default Boxes)
(4)数据扩增
主要采用的技术有水平翻转(horizontal flip),随机裁剪加颜色扭曲(random crop & color distortion),随机采集块域(Randomly sample a patch)(获取小目标训练样本)
- 数据扩增技术很重要,对于mAP的提升很大;
- 使用不同长宽比的先验框可以得到更好的结果;
- 采用多尺度的特征图用于检测也是至关重要的。
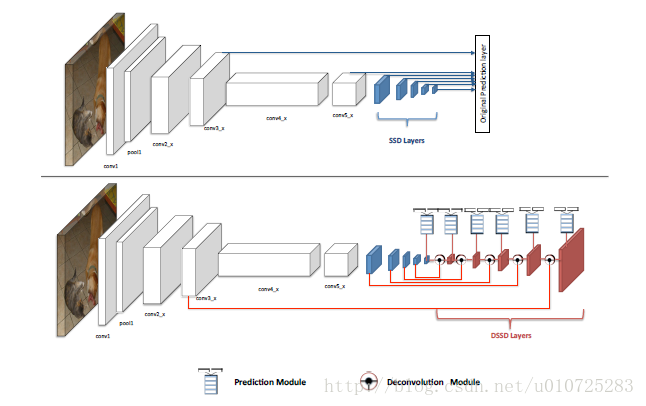
5、DSSD(2017)
最大的贡献,在常用的目标检测算法中加入上下文信息。
SSD算法对小目标不够鲁棒的最主要的原因是浅层feature map的表征能力不够强。DSSD就使用了更好的基础网络(ResNet-101)和Deconvolution层,skip连接来给浅层feature map更好的表征能力。
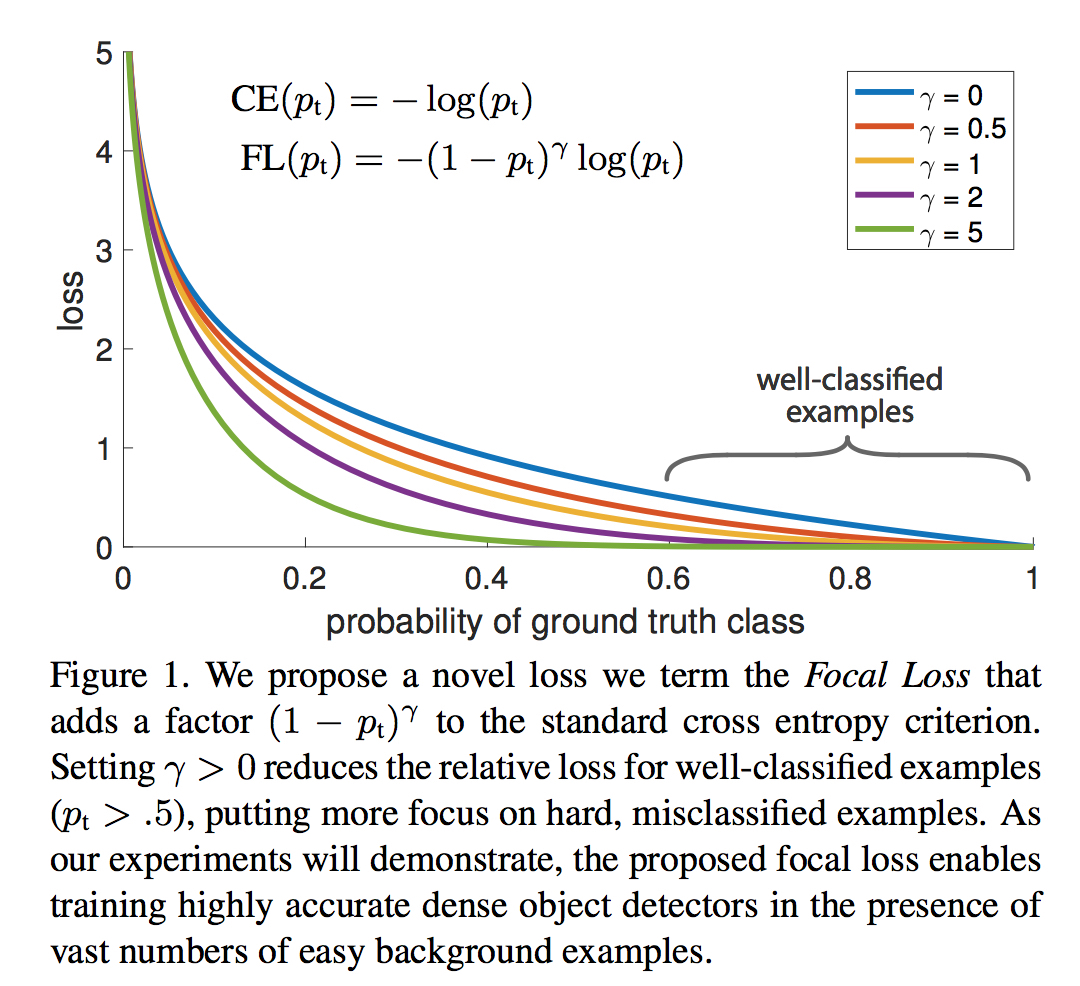
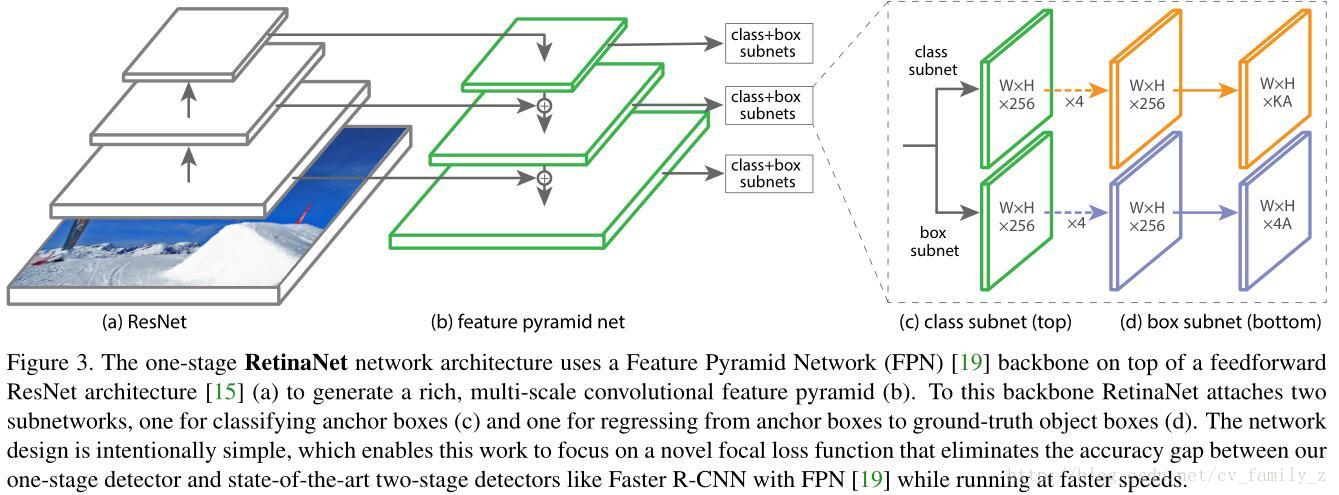
6、RetinaNet(2017)
提出Single stage detector不好的原因完全在于:
- 极度不平衡的正负样本比例: anchor近似于sliding window的方式会使正负样本接近1000:1,而且绝大部分负样本都是easy example,这就导致下面一个问题:
- gradient被easy example dominant的问题:往往这些easy example虽然loss很低,但由于数 量众多,对于loss依旧有很大贡献,从而导致收敛到不够好的一个结果。
作者提出了一个新的one-stage的检测器RetinaNet,达到了速度和精度很好地trade-off。使用改进的损失函数Focal Loss。
Focal Loss从交叉熵损失而来。二分类的交叉熵损失如下:
参考博客:http://lanbing510.info/2017/08/28/YOLO-SSD.html
目标检测 — one-stage检测(二)的更多相关文章
- 带你读AI论文丨用于目标检测的高斯检测框与ProbIoU
摘要:本文解读了<Gaussian Bounding Boxes and Probabilistic Intersection-over-Union for Object Detection&g ...
- 运动检测(前景检测)之(二)混合高斯模型GMM
运动检测(前景检测)之(二)混合高斯模型GMM zouxy09@qq.com http://blog.csdn.net/zouxy09 因为监控发展的需求,目前前景检测的研究还是很多的,也出现了很多新 ...
- 图片人脸检测——OpenCV版(二)
图片人脸检测 人脸检测使用到的技术是OpenCV,上一节已经介绍了OpenCV的环境安装,点击查看. 往期目录 视频人脸检测——Dlib版(六)OpenCV添加中文(五)图片人脸检测——Dlib版(四 ...
- 目标检测之单步检测(Single Shot detectors)
目标检测之单步检测(Single Shot detectors) 前言 像RCNN,fast RCNN,faster RCNN,这类检测方法都需要先通过一些方法得到候选区域,然后对这些候选区使用高质量 ...
- 基于PySpark的网络服务异常检测系统 阶段总结(二)
在上篇博文中介绍了网络服务异常检测的大概,本篇将详细介绍SVDD和Isolation Forest这两种算法 1. SVDD算法 SVDD的英文全称是Support Vector Data Descr ...
- JavaScript浏览器检测之客户端检测
客户端检测一共分为三种,分别为:能力检测.怪癖检测和用户代理检测,通过这三种检测方案,我们可以充分的了解当前浏览器所处系统.所支持的语法.所具有的特殊性能. 一.能力检测: 能力检测又称作为特性检测, ...
- OPENCV图像特征点检测与FAST检测算法
前面描述角点检测的时候说到,角点其实也是一种图像特征点,对于一张图像来说,特征点分为三种形式包括边缘,焦点和斑点,在OPENCV中,加上角点检测,总共提供了以下的图像特征点检测方法 FAST SURF ...
- 离群点检测与序列数据异常检测以及异常检测大杀器-iForest
1. 异常检测简介 异常检测,它的任务是发现与大部分其他对象不同的对象,我们称为异常对象.异常检测算法已经广泛应用于电信.互联网和信用卡的诈骗检测.贷款审批.电子商务.网络入侵和天气预报等领域.这些异 ...
- kaggle信用卡欺诈看异常检测算法——无监督的方法包括: 基于统计的技术,如BACON *离群检测 多变量异常值检测 基于聚类的技术;监督方法: 神经网络 SVM 逻辑回归
使用google翻译自:https://software.seek.intel.com/dealing-with-outliers 数据分析中的一项具有挑战性但非常重要的任务是处理异常值.我们通常将异 ...
- unity3d 赛车游戏——复位点检测优化、反向检测、圈数检测、赛道长度计算
接着上一篇文章说 因为代码简短且思路简单 所以我就把这几个功能汇总为一篇文章 因为我之前就是做游戏外挂的 经过验证核实,**飞车的复位点检测.圈数检测就是以下的方法实现的 至于反向检测和赛道长度计算, ...
随机推荐
- Weka关联规则分析
购物篮分析: Apriori算法: 参数设置: 1.car 如果设为真,则会挖掘类关联规则而不是全局关联规则. 2. classindex 类属性索引.如果设置为-1,最后的属性被当做类属性. 3. ...
- MSP430G2553电子时钟实验
用msp430g2553控制1602液晶显示时间,并能够通过按键设置时间.我做了正计时和倒计时两种模式 /*********************************************** ...
- justify-content 定义子元素在父元素水平位置排列的顺序
justify-content 定义子元素在父元素水平位置排列的顺序,需要和display:flex使用才会生效. 有五个属性: 1.flex-start(默认值) 左对齐 2.flex-end 右 ...
- Shell Error: -bash: ./test.sh: /bin/bash^M: bad interpreter: No such file or directory (转)
错误原因可能有以下几种: 1.在WIN底下用文本编辑工具修改过参数变量,在保存的时候没注意编码格式造成的, 2.也有可能是在VIM里修改,第一行末尾按到ctrl_v 查看文件是DOS格式.UNIX格式 ...
- SPSS统计功能与模块对照表
SPSS统计功能 - 应用速查表第一列为统计方法,中间为统计功能,最后一列为所在模块 1 ANOVA Models(单因素方差分析:简单因子) : 摘要 描述 方差 轮廓 - SPSS Base 2 ...
- c# 控制台程序 隐藏控制台窗口
在某些项目中,需要采用控制台程序,但是又不需要通过dos窗口进行交互,同时打算隐藏掉难看的控制台窗口.实现的方法很多,有的是修改链接命令.我采用的方法略有些麻烦,首先是给窗口命名,之后找到该窗口指针, ...
- asp.net core使用中间件美化开发环境异常页面
asp.net core系统自带的异常页面色彩给人感觉模糊.朦胧,晕眩! 原版: 美化版 实现思路:(在系统自带异常中间件“DeveloperExceptionPageMiddleware”执行后,调 ...
- 在linux下解压缩 tar.gz文件
解压:tar -xzvf 文件名 压缩 tar czf xx.tar.gz xxxx文件名
- Android 热门技术干货
http://mp.weixin.qq.com/s?__biz=MzIwMzYwMTk1NA==&mid=2247484939&idx=1&sn=d1871b09de55ca6 ...
- spring BeanFactory加载xml配置文件示例
项目目录结构如下: HelloWorld.java package com.thief.demo; public class HelloWorld { public void sayHello() { ...