UE4物理模块(一)---概述与可视化调试
UE4.21前的版本采用的是NVIDIA的PhysX做为其默认的物理引擎,用于计算3D世界的碰撞查询与物理模拟。自4.21版本开始改物理调用接口,但这并不是闲来重构代码,果然在2019GDC大会上放出了正在自建Chaos物理系统的消息,从4.22预览版中已经可以看到相关代码,官方预计4.23就可以开始使用,还是值得期待的。
最近打算重点研究下物理系统,知乎上已经有相当不错的研究报告了,强烈推荐看的是:
Jerish:《Exploring in UE4》物理模块浅析[原理分析]zhuanlan.zhihu.com
作者自己是花了很多功夫研读代码写成的,虽是浅析也非常详细。
此外还有:

以及代码贴得比较多的:
也都值得看看。
我自己再写这块地方,自然会做到与几位前辈有区分度,也希望大家读后会有不同的体会。还是以问答的方式来阐述,会比较清晰些。
1. 什么是游戏中的物理系统?
游戏物理主要是解决两个问题,其一是碰撞查询(Query),比如我面前有一堵墙,我还可以走多远就会被撞到;其二是物理模拟(Simulation),比如游戏角度死亡后身体该如何倒下,飞驰的载具被路上的矮石墩碰到后如何表现等。
2. UE4是如何建立物理系统的?
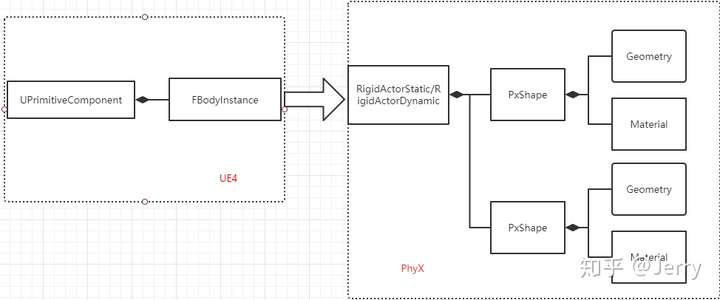
目前版本还是依赖于第三方的PhysX,UE4自身提供PrimitiveComponent,拥有BodyInstance,上面记录了PhysX所需要的物理数据,会将这些信息传递给PhysX所创建的物理世界,然后由PhyX进行处理,并得到其返回的结果。
那么既然物理的结果涉及到UE4和三方PhysX,那出了问题该怎么查,自然就有如下问题了。
3. 如何Debug物理系统?
对于UE4,可以在跑起的游戏中按`(键盘左上角ESC的正下方)呼出控制台,然后单击show collision(会自动联想,差不多的时候按TAB键就补全了),如下图:

回车后就可以看到世界里面多了线条型的盒子,如下图:

这就是UE4里面提供给PhysX处理前的碰撞信息,我们称之为碰撞盒,它大致包住了物体模型。碰撞盒可以做的很简单(如上图用物体轮廓包围盒),也可以做的很复杂(如直接用物体模型本身三角面片),这个下一章就说。
对于PhyX,它对于UE4来说就是一个提供输入然后获取输出的黑盒,不过可以通过NVIDIA提供的PhysX Visual Debugger(PVD)来进行可视化调试,下载地址如下:
PhysX Visual Debuggerdeveloper.nvidia.com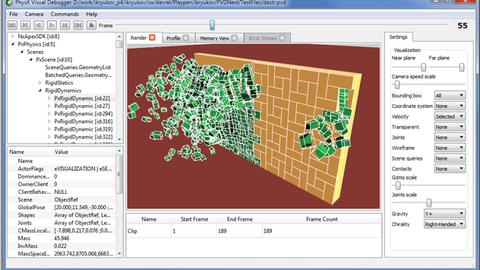
需要注册账户才可以下载,安装成功后会看到软件的图标如下:
运行界面如下:
什么也没有,别急,我们在编辑器里跑起游戏,呼出控制台,然后输入pvd connect,如下:

过一会儿就可以按ESC停掉游戏,这时回到PVD软件窗口,就可以看到软件里面有东西显示出来了,是一个巨大的黄球,如下:
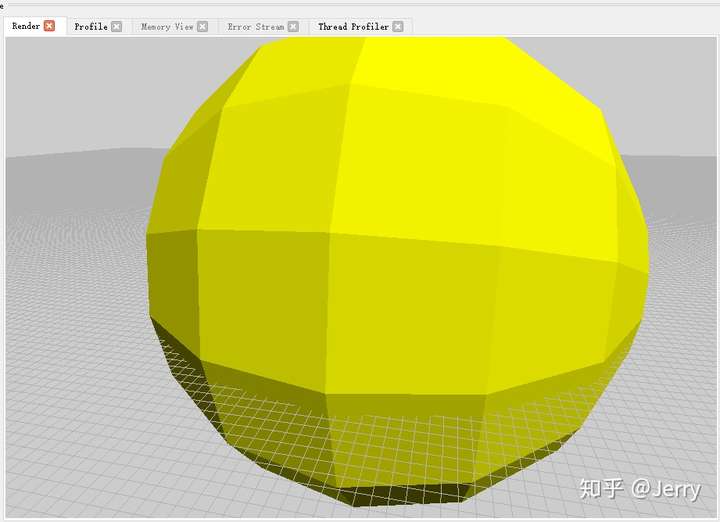
在右侧Setting栏里面把Sleeping objects给关掉,如下:
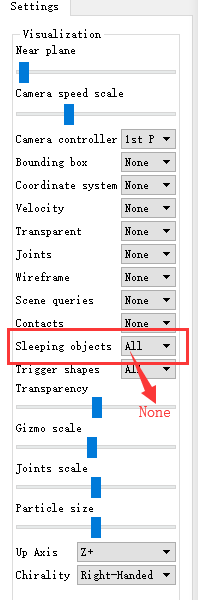
这样就可以看到与游戏内场景样子差不多的物理世界了,如下:
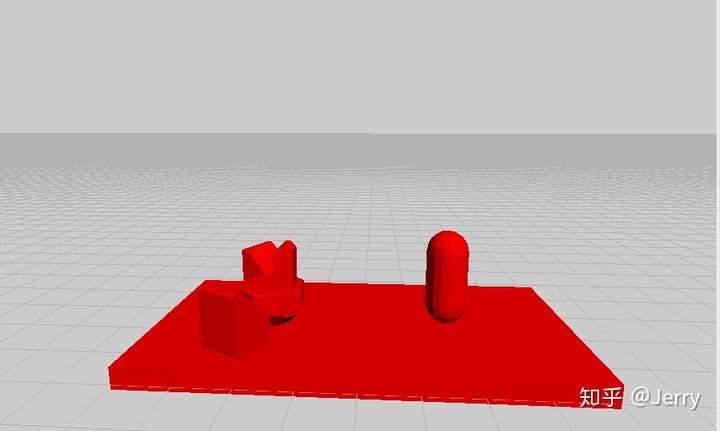
可以看到两个椅子,还有一个桌子,桌子上放着一个雕塑模型,这与之前在UE4里面按show collision得到的结果是一致的,是较为粗糙的轮廓包围盒,至于靠右的圆柱,那是玩家的出生点,因为有碰撞所以也会被物理世界采集到。
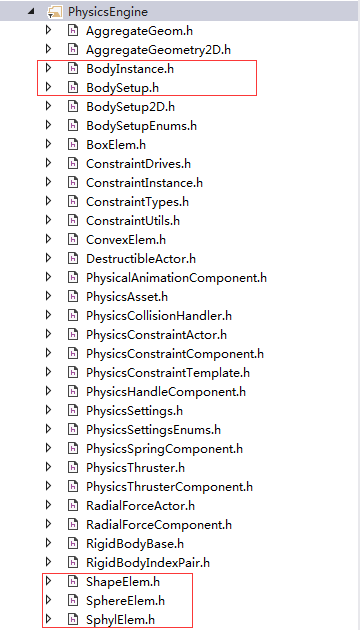
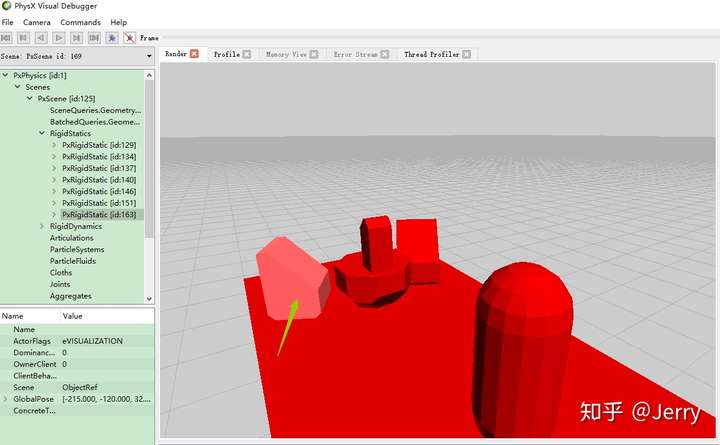
每一个物理对象在PhyX里面都对应一个PxRigid,如果这个对象是静态的,则是PxRigidStatic,在PVD里面绘制成红色;如果这个对象是动态的,则是PxRigidDynamic,在PVD里面绘制成黄色的。这里所有非休眠对象都是静态的,所以上图看上去都是红色的。可以选中其中的一个模型,比如左侧的椅子,可以看到左侧面板上列出了它对应的那个PxRigidStatic,id是163,如下:
展开这个PxRigidStatic,发现它有两个PxShape,展开Geometry,可以看到分别是凸包模型(ConvexMesh)与三角形模型(TriangleMesh),如下:
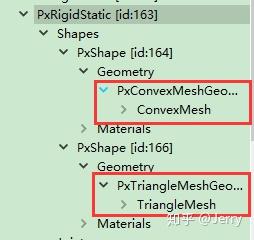
这实际上对应于这个椅子的两个碰撞盒,一个是简单碰撞盒凸包,一个是复杂碰撞盒模型自身三角形, 这个会在下一章节介绍。PVD软件顶上还有一个显示帧数的拖拉条,如下:
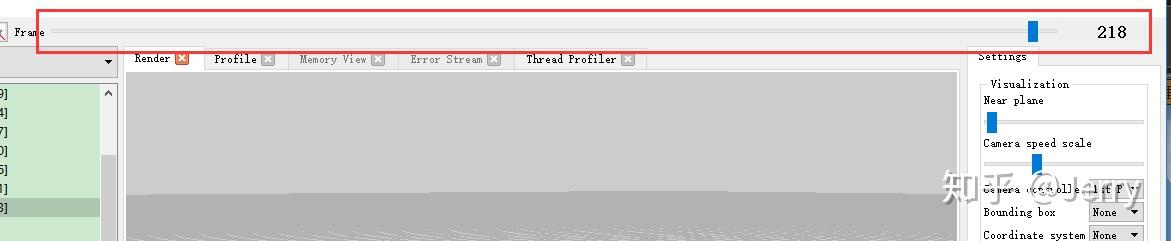
右侧数字说明在物理世界里面总共有218帧,可以拖动显示前几帧内物理世界的变化,这个在分析动态物理对象时非常有用,但本示例都是静态物理对象,所以没啥变化。
这个PVD工具非常好用(虽然会常常崩溃),在以后的章节中会经常用到,这里只要知道用pvd connect命令进行物理世界可视化即可,了解下物体的碰撞盒。那么问题来了:
4. 物体的碰撞盒是如何建立的呢?
详见:
Jerry:UE4物理模块(二)---建立物体碰撞zhuanlan.zhihu.com
5. 两个物体靠近会发生什么呢?
详见:
Jerry:UE4物理模块(三)---碰撞查询zhuanlan.zhihu.com
UE4物理模块(一)---概述与可视化调试的更多相关文章
- UE4物理模块(二)---建立物体碰撞
在前文中介绍了什么是物理以及如何在UE4和PhysX中进行可视化调试: Jerry:UE4物理模块(一)---概述与可视化调试zhuanlan.zhihu.com 这里调试只谈到了碰撞盒(后续还会有 ...
- UE4物理模块(三)---碰撞查询(下)SAP/MBP/BVH算法简介
在上一文中介绍了碰撞查询的配置方法: Jerry:UE4物理模块(三)---碰撞查询(上)zhuanlan.zhihu.com 本篇介绍下UE4的各种零大小的射线检测,以及非零大小(带体积)的射线检 ...
- UE4物理模块(三)---碰撞查询(上)
在前一文中介绍了如何在UE4中创建简单碰撞或者直接使用其mesh表示的复杂碰撞: Jerry:UE4物理模块(二)---建立物体碰撞zhuanlan.zhihu.com 那么在拿到碰撞之后,就可以进 ...
- 开源发布:VS代码段快捷方式及可视化调试快速部署工具
前言: 很久前,我发过两篇文章,分别介绍自定义代码版和可视化调试: 1:Visual Studio 小技巧:自定义代码片断 2:自定义可视化调试工具(Microsoft.VisualStudio.De ...
- 使用c#反射实现接口可视化调试页面
直接上代码,引用CommTools.dll.包括aspx显示页面和aspx.cs获取反射数据源代码 using System; using System.Collections.Generic; us ...
- Halcon12新特性之VS可视化调试插件
当我们用VC\C#调试halcon代码的时候,通常会遇到一个头痛的问题,我们无法看到halcon变量的调试信息 如下图:什么鬼...什么鬼 比如我们想看一个double数值变量,我们需要 doub ...
- Python笔记_第二篇_面向过程_第二部分_3.模块的概述
这部分内容是非常重要的,分模块的基本概念和一些常用模块的使用,其实常用模块使用这部分也不是太全面,后续或者有机会再通过其他材料进行讲解. 1. 模块的概述: 目前代码比较少,写在一个文件中还体现不出什 ...
- Linux开源模块迁移概述暨交叉编译跨平台移植总结--从《嵌入式Linux驱动模板简洁和工程实践》
本文摘录<嵌入式Linux驱动模板简洁和工程实践>一本书"开发和调试技术". Linux强大的是,有那么多的开源项目可以使用.通常非常需要可以通过寻找相关的源模块被定义 ...
- UE4物理笔记
基本 物理资源随骨骼创建,可添加到骨骼网格上. 物理材质可添加到材质或组件或物理资源上. 通过配置PrimitiveComponent组件的Collision Presets值,可实现自定义的碰撞忽略 ...
随机推荐
- Nmap扫描原理(下)
转自:https://blog.csdn.net/qq_34398519/article/details/89055999 3 Nmap高级用法 3.1 防火墙/IDS规避 防火墙与ID ...
- mysql工具使用
mysql -u user_name -p123456 -h host_name -P 3306 -D database_name -e "show full processlist;&qu ...
- csp-s模拟测试52平均数,序列题解
题面:https://www.cnblogs.com/Juve/articles/11602244.html 平均数: 第k个平均数不好求,我们考虑二分,转化成平均数小于x的有几个 虑把序列中的每个数 ...
- transform函数
C++学习[原创]transform函数的应用 transform(first,last,result,op);//first是容器的首迭代器,last为容器的末迭代器,result为存放结果的容器, ...
- [洛谷]P1505 [国家集训队]旅游
题目链接: 传送门 题目分析: 树剖板,支持单点修改,区间取反,区间求最大值/最小值/和 区间取反取两次等于没取,维护一个\(rev\ tag\),每次打标记用\(xor\)打,记录是否需要翻转,\( ...
- 在Bat批处理中调用Powershell脚本
##如何在BAT中调用powershell,把下面代码另存为bat格式pushd %~dp0powershell.exe -command ^ "& {set-executionp ...
- spring中关于<context:component-scan>的使用说明
通常情况下我们在创建spring项目的时候在xml配置文件中都会配置这个标签,配置完这个标签后,spring就会去自动扫描base-package对应的路径或者该路径的子包下面的java文件,如果扫描 ...
- javascript date utc
版权声明:本文为博主原创文章,未经博主同意不得转载. https://blog.csdn.net/huangbin10025/article/details/37503465 近期在使用highsto ...
- Tensorboard在Win7下chrome无论如何无法连接的情况
后记:其实发现原因后感觉自己很蠢,是自己开了一个软件叫adsafe,会屏蔽一些东西,所以我拼命的用自己的电脑ip都连不上,换成回环地址就好了,把软件关了也可以. 在无数种尝试后,终于在stackove ...
- 2018-10-20-C#-从零开始写-SharpDx-应用-初始化dx修改颜色
title author date CreateTime categories C# 从零开始写 SharpDx 应用 初始化dx修改颜色 lindexi 2018-10-20 17:34:37 +0 ...