CMSIS-RTOS 信号量
信号量Semaphores
和信号类似,信号量也是一种同步多个线程的方式,简单来讲,信号量就是装有一些令牌的容器。当一个线程在执行过程中,就可能遇到一个系统调用来获取信号量令牌,如果这个信号量包含多个令牌,线程就会继续执行,同时信号量令牌的数量就会减一。如果此时信号量中没有令牌,线程就会被置于等待状态,直到出现一个可用的令牌。在线程执行的任何位置,它都可以给信号量增加一个令牌。
信号量用来帮助访问程序资源,在一个线程允许访问一个信号量之前,它必须拥有一个令牌。如果没有令牌可用,它就必须等待,当线程使用完资源时,它就必须释放令牌。
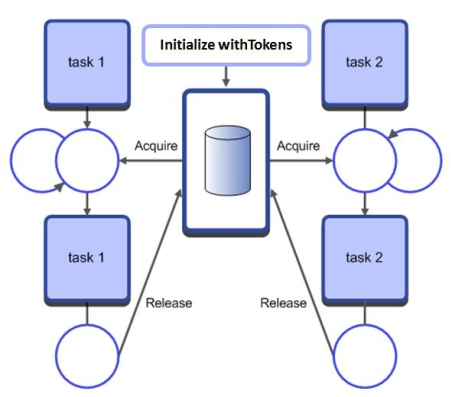
上图揭示了两个线程如何使信号量同步。首先,必须创建一个信号量,并初始化令牌数目,在上图中,信号量初始化令牌数目为1。当两个线程运行到某一点时就试图从信号量中请求一个令牌,图中第一个线程到达这个点,成功获取一个令牌,然后继续执行,第二个线程也试图获取一个令牌,但是当前信号量为空,所以它暂停执行,并进入等待状态,直到信号量中有令牌可用。
与此同时,执行中的线程可以释放令牌给信号量,一旦释放完成,等待中的线程就会获取令牌,并离开等待状态进入准备状态。紧接着调度器就会把它调度到运行状态去执行剩下的代码。
因为信号量保含较多的系统调用,所以想一次性全部理解有些难度,在本节,我们将首先看看如何给系统添加信号量,然后了解一下常用的信号量应用。
在使用信号量之前,你必须先声明一个信号量容器:
osSemaphoreId sem1;osSemaphoreDef(sem1);
然后在线程里给信号量容器初始化一些令牌:
sem1 = osSemaphoreCreate(osSemaphore(sem1), SIX_TOKENS);
有一点比较重要,就是在线程运行的过程中令牌既可以被创建也可以被销毁,举个例子,你可以初始化一个信号量,拥有0个令牌,然后用一个线程给这个信号量创建一些令牌,再使用另一个线程移除它们,这样一来,你就可以设计线程,既可以充当生产者的线程,也可以充当消费者的线程。
一旦信号量被创建,令牌就可能被获取,并以类似事件标志的方式发送给信号量,os_sem_wait调用来阻塞线程,直到有信号量令牌可用,类似os_event_wait,当然,在这个调用中同样拥有超时机制,超时初始值是0xFFFF。
osStatus osSemaphoreWait(osSemaphoreId semaphore_id, uint32_t millisec);
一旦线程完成对信号量资源的使用,它就可以给信号量容器发送一个令牌:
osStatus osSemaphoreRelease(osSemaphoreId semaphore_id);
信号量的使用Using Semaphores
前面说过信号量包含较多的OS调用,所以它拥有广泛的同步应用,这也就导致了它可能是RTOS里面最难理解的部分。在本节,我们将看看信号量的一些普遍应用,这些应用摘自“信号量小书”(Allen B. Downey著),这本书可以免费下载,链接在本书的最后部分。
发送信号Signaling
两个线程之间的同步是信号量最简单的使用方式:
osSemaphoreId sem1;osSemaphoreDef(sem1);void thread1 (void){sem1 = osSemaphoreCreate(osSemaphore(sem1), 0);while(1){FuncA();osSemaphoreRelease(sem1)}}void thread2 (void){while(1){osSemaphoreWait(sem1,osWaitForever)FuncB();}}
复用Multiplex
复用是用来限制访问临界代码区的线程个数,举个例子,对于存储空间的访问仅仅可能只支持几个受限的调用。
osSemaphoreId multiplex;osSemaphoreDef(multiplex);void thread1 (void){multiplex =osSemaphoreCreate(osSemaphore(multiplex), FIVE_TOKENS);while(1) {osSemaphoreWait(multiplex,osWaitForever)ProcessBuffer();osSemaphoreRelease(multiplex);}}
在这个例子中,我们给复用信号量初始化了5个令牌,当一个线程要调用ProcessBuffer()函数时,就必须首先获取信号量令牌,一旦此函数结束,令牌必须归还给信号量。如果超过5个线程试图调用ProcessBuffer()函数,第六个线程就必须等待其中一个线程完成ProcessBuffer()函数,并归还令牌。就这样,复用信号量确保了最多只能有5个线程可以“同时”调用ProcessBuffer()函数。
交汇Rendezvous
一种更常规的信号量通信形式叫做交汇,交汇确保两个线程同时到达某个确定的执行点,除非两个线程都到达这个交汇点,否则它们都不会继续运行。
osSemaphore arrived1, arrived2;osSemaphoreDef(arrived1);osSemaphoreDef(arrived2);void thread1(void){Arrived1 = osSemphoreCreate(osSemphore(arrived1),ZERO_TOKENS);Arrived2 = osSemphoreCreate(osSemphore(arrived2),ZERO_TOKENS);while(1){FuncA1();osSemphoreRelease(Arrived1);osSemphoreWait(Arrived2, osWaitForever);FuncA2();}}void thread2(void){while(1){FuncB1();os_sem_send(Arrived2);os_sem_wait(Arrived, osWaitForever);FuncB2();}}
上面的例子中,两个信号量会确保两个线程发生交汇,然后各自执行FuncA2()和FuncB2()。
CMSIS-RTOS 信号量的更多相关文章
- CMSIS RTOS -- embOS segger
#ifndef __CMSIS_OS_H__ #define __CMSIS_OS_H__ #include <stdint.h> #include <stddef.h> #i ...
- RTOS之CMSIS-RTOS
CMSIS-RTOS 是实时操作系统的通用 API.它提供了标准化的编程接口,它只是封装了RTX/embos,以后还可能封装freeRTOS,uc/os等等第三方OS,CMSIS RTOS是ARM现在 ...
- CMSIS_RTOS_Tutorial自译中文版
一.序言 本资料是Trevor Martin编写的<The Designers Guide to the Cortex-M Processor Family>的摘要,并得到Elsevier ...
- ARM官方《CMSIS-RTOS教程》之线程Threads
创建线程Creating Threads 一旦RTOS开始运行,就会有很多系统调用来管理和控制活跃的线程.默认情况下,main()函数自动被创建为第一个可运行的线程.在第一个例子里我们使用main() ...
- STM32F429i-DISCO FreeRTOS keil STM32CubeMX
目标: 在STM32F429 Disco开发板上用FreeRTOS双线程点亮双闪led. 准备: 0. STM32F429i-DISCO 1. keil ARMMDK 5.13 2. STM32Cub ...
- CMSIS-RTOS 时间管理之时间延迟Time Delay
时间管理 Time Management 此RTOS除了可以把你的应用代码作为线程运行,它还可以提供一些时间服务功能,使用这些功能你就可以访问RTOS的一些系统调用. 时间延迟Time Delay 在 ...
- CMSIS-RTOS的使用
CMSIS-RTOS实现通常作为库提供.要将RTOS功能添加到现有的基于CMSIS的应用程序,需要添加RTOS库(通常是配置文件).RTOS库的可用功能在头文件cmsis_os.h中定义,该文件特定于 ...
- 聊聊CMSIS-RTOS是什么东东
起因:发布自己翻译用的CMSIS_RTOS_Tutorial后,陆续收到网友关于“CMSIS-RTOS是干么的?”之类的问题,再次统一回复. 众所周知,实时操作系统是嵌入式领域的基石.而可选的嵌入式操 ...
- 【机翻】RTnet – 灵活的硬实时网络框架
目录 RTnet – 灵活的硬实时网络框架 0 摘要 1 介绍 2 基础服务 2.1 数据包管理 2.2 UDP/IP 实现 2.3 Driver Layer 2.4 应用程序接口 2.5 捕获扩展 ...
- 优先级反转实验,使用信号量实现【RT-Thread学习笔记 5】
RTOS中很经典的问题.就是在使用共享资源的时候,优先级低的进程在优先级高的进程之前执行的问题.这里模拟这种情况. 下面的实验模拟了优先级反转的情况: 先定义三个线程: //优先级反转实验 rt_se ...
随机推荐
- solarwinds之数据库
1. Orion配置向导 2. 连接数据库 3. 创建一个新的数据库 4. ...
- Caffe学习--Blob分析
Caffe_blob 1.基本数据结构 Blob为模板类,可以理解为四维数组,n * c * h * w的结构,Layer内为blob输入data和diff,Layer间的blob为学习的参数.内部封 ...
- oralce模糊查询之含有通配符
oracle中通配符有 '_'和'%'当like '_ww%'时,会把'_'和'%'当作通配符使用导致查不出含有'_'和'%'的数据.这时用到转译字符 like '\_ww\%' escape '\ ...
- 1044 - Access denied for user 'root'@'%' to database 'xahy-blog'
grant 创建了一个远程连接 root 权限账户, 准备再授权个对应数据库操作的账户时出现了 1044 错误. [SQL]grant all privileges on xahy-blog.* to ...
- 查看linux磁盘文件系统类型
1.查看已经挂载了的磁盘的文件系统信息. [root@python2 ~]# df -hT 文件系统 类型 容量 已用 可用 已用% 挂载点 /dev/mapper/cl_python2-root x ...
- CF474F Ant colony
#include<iostream> #include<cstring> #include<cstdio> #include<algorithm> #i ...
- 系统级脚本 rpcbind
[root@web02 ~]# vim /etc/init.d/rpcbind #! /bin/sh # # rpcbind Start/Stop RPCbind # # chkconfig: 234 ...
- 4.有关日期格式属性改动常识,v$nls_parameters,between and,查询指定部门的员工信息,in和null,like模糊查询,order by后面能够跟:列名、表达式、别名、序号
1 有关日期格式属性改动常识 NLS_DATE_FORMAT DD-MON-RR select sysdate from dual; NLS_CURRENCY ...
- Linux系统编程——进程间通信:共享内存
概述 url=MdyPihmS_tWLwgWL5CMzaTrwDFHu6euAJJUAjKvlzbJmRw7RfhmkBWwAloo7Y65hLY-kQdHsbqWYP2wc2fk8yq"& ...
- thinkphp5项目--个人博客(一)
thinkphp5项目--个人博客(一) 项目地址 fry404006308/personalBlog: personalBloghttps://github.com/fry404006308/per ...