uboot启动过程 1
_start:
#ifdef CONFIG_SYS_DV_NOR_BOOT_CFG
.word CONFIG_SYS_DV_NOR_BOOT_CFG
#endif
// 相对跳转和绝对跳转
// https://blog.csdn.net/u013368345/article/details/91882554
b reset
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
。。。。。
reset函数在文件arch/arm/cpu/armv7/start.S
// 9种模式 [4:0]
// 10000 USER(user)
// 10001 FIQ(fiq)
// 10010 IRQ(irq)
// 10011 Supervisor(svc)
// 10110 Monitor(mon)
// 10111 Abort(abt)
// 11010 Hyp(hyp)
// 11011 Undefined(und)
// 11111 System(sys)
void s_init(void)
{
struct anatop_regs *anatop = (struct anatop_regs *)ANATOP_BASE_ADDR;
struct mxc_ccm_reg *ccm = (struct mxc_ccm_reg *)CCM_BASE_ADDR;
u32 mask480;
u32 mask528;
u32 reg, periph1, periph2;
if (is_cpu_type(MXC_CPU_MX6SX) || is_cpu_type(MXC_CPU_MX6UL) ||
is_cpu_type(MXC_CPU_MX6ULL) || is_cpu_type(MXC_CPU_MX6SLL))
return; // 对于MXC_CPU_MX6ULL, 这里什么都没做
/* Due to hardware limitation, on MX6Q we need to gate/ungate all PFDs
* to make sure PFD is working right, otherwise, PFDs may
* not output clock after reset, MX6DL and MX6SL have added 396M pfd
* workaround in ROM code, as bus clock need it
*/
mask480 = ANATOP_PFD_CLKGATE_MASK(0) |
ANATOP_PFD_CLKGATE_MASK(1) |
ANATOP_PFD_CLKGATE_MASK(2) |
ANATOP_PFD_CLKGATE_MASK(3);
mask528 = ANATOP_PFD_CLKGATE_MASK(1) |
ANATOP_PFD_CLKGATE_MASK(3);
reg = readl(&ccm->cbcmr);
periph2 = ((reg & MXC_CCM_CBCMR_PRE_PERIPH2_CLK_SEL_MASK)
>> MXC_CCM_CBCMR_PRE_PERIPH2_CLK_SEL_OFFSET);
periph1 = ((reg & MXC_CCM_CBCMR_PRE_PERIPH_CLK_SEL_MASK)
>> MXC_CCM_CBCMR_PRE_PERIPH_CLK_SEL_OFFSET);
/* Checking if PLL2 PFD0 or PLL2 PFD2 is using for periph clock */
if ((periph2 != 0x2) && (periph1 != 0x2))
mask528 |= ANATOP_PFD_CLKGATE_MASK(0);
if ((periph2 != 0x1) && (periph1 != 0x1) &&
(periph2 != 0x3) && (periph1 != 0x3))
mask528 |= ANATOP_PFD_CLKGATE_MASK(2);
writel(mask480, &anatop->pfd_480_set);
writel(mask528, &anatop->pfd_528_set);
writel(mask480, &anatop->pfd_480_clr);
writel(mask528, &anatop->pfd_528_clr);
}
ENTRY(_main)
// Set up initial C runtime environment and call board_init_f(0).
#if defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr sp, =(CONFIG_SPL_STACK)
#else
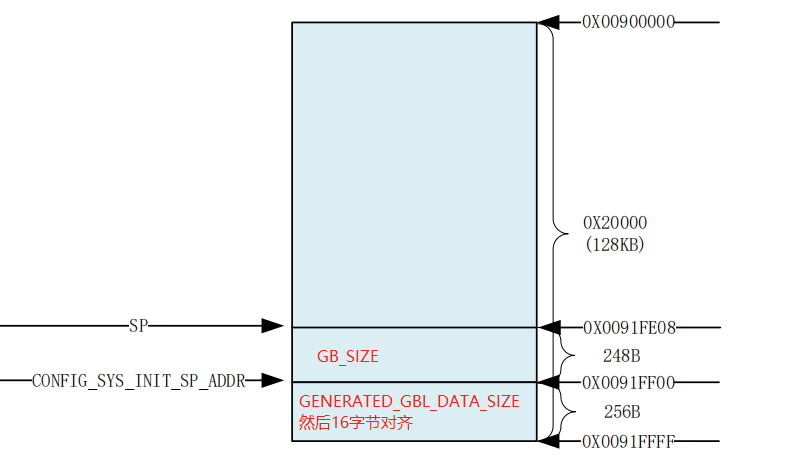
ldr sp, =(CONFIG_SYS_INIT_SP_ADDR) // 设置 sp 指针为 CONFIG_SYS_INIT_SP_ADDR,也就是 sp 指向 0X0091FF00
#endif
#if defined(CONFIG_CPU_V7M) /* v7M forbids using SP as BIC destination */
mov r3, sp
bic r3, r3, #7
mov sp, r3
#else
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */ // sp 做 8 字节对齐
#endif
mov r0, sp // r0=0X0091FF00
bl board_init_f_alloc_reserve // board_init.c中, 参数为r0的值
mov sp, r0 // top=0X0091FA00, 内存布局为gd_t: [0X0091FA00, 0X0091FB00-8) alloc:[0X0091FB00, 0X0091FF00)
/* set up gd here, outside any C code */
mov r9, r0
bl board_init_f_init_reserve // board_init.c中, 参数为r0的值, 最终gd->malloc_base=0X0091FB00这个也就是 early malloc 的起始地址
mov r0, #0
bl board_init_f // 函数定义在文件 common/board_f.c 中!主要用来初始化 DDR,定时器,完成代码拷贝
#if ! defined(CONFIG_SPL_BUILD)
ldr sp, [r9, #GD_START_ADDR_SP] /* sp = gd->start_addr_sp */
#if defined(CONFIG_CPU_V7M) /* v7M forbids using SP as BIC destination */
mov r3, sp
bic r3, r3, #7
mov sp, r3
#else
bic sp, sp, #7 /* 8-byte alignment for ABI compliance */
#endif
ldr r9, [r9, #GD_BD] /* r9 = gd->bd */
sub r9, r9, #GD_SIZE /* new GD is below bd */
adr lr, here // 后面执行其他函数返回here
ldr r0, [r9, #GD_RELOC_OFF] /* r0 = gd->reloc_off */
// lr 中的 here 要使用重定位后的位置
add lr, lr, r0
#if defined(CONFIG_CPU_V7M)
orr lr, #1 /* As required by Thumb-only */
#endif
ldr r0, [r9, #GD_RELOCADDR] /* r0 = gd->relocaddr */ // uboot要从0x87800000复制到0X9FF47000
b relocate_code // arch/arm/lib/relocate.S
here:
/*
* now relocate vectors
*/
bl relocate_vectors // arch/arm/lib/relocate.S
/* Set up final (full) environment */
bl c_runtime_cpu_setup /* we still call old routine here */ // arch/arm/cpu/armv7/start.S
#endif
#if !defined(CONFIG_SPL_BUILD) || defined(CONFIG_SPL_FRAMEWORK)
# ifdef CONFIG_SPL_BUILD
/* Use a DRAM stack for the rest of SPL, if requested */
bl spl_relocate_stack_gd
cmp r0, #0
movne sp, r0
movne r9, r0
# endif
// 清除bss开始
ldr r0, =__bss_start /* this is auto-relocated! */
#ifdef CONFIG_USE_ARCH_MEMSET
ldr r3, =__bss_end /* this is auto-relocated! */
mov r1, #0x00000000 /* prepare zero to clear BSS */
subs r2, r3, r0 /* r2 = memset len */
bl memset
#else
ldr r1, =__bss_end /* this is auto-relocated! */
mov r2, #0x00000000 /* prepare zero to clear BSS */
clbss_l:cmp r0, r1 /* while not at end of BSS */
#if defined(CONFIG_CPU_V7M)
itt lo
#endif
strlo r2, [r0] /* clear 32-bit BSS word */
addlo r0, r0, #4 /* move to next */
blo clbss_l
// 清除bss完成
#endif
#if ! defined(CONFIG_SPL_BUILD)
bl coloured_LED_init
bl red_led_on
#endif
// 第一个参数是 gd,因此读取 r9 保存到 r0 里面
// 设置函数 board_init_r 的第二个参数是目的地址,因此 r1= gd->relocaddr
/* call board_init_r(gd_t *id, ulong dest_addr) */
mov r0, r9 /* gd_t */
ldr r1, [r9, #GD_RELOCADDR] /* dest_addr */
/* call board_init_r */
#if defined(CONFIG_SYS_THUMB_BUILD)
ldr lr, =board_init_r /* this is auto-relocated! */
bx lr
#else
ldr pc, =board_init_r /* this is auto-relocated! */
#endif
/* we should not return here. */
#endif
ENDPROC(_main)
可见_main主要是 调用了board_init_f、relocate_code、relocate_vectors 和 board_init_r 这 4 个函数
ulong board_init_f_alloc_reserve(ulong top)
{
/* Reserve early malloc arena */
#if defined(CONFIG_SYS_MALLOC_F)
top -= CONFIG_SYS_MALLOC_F_LEN;
#endif
/* LAST : reserve GD (rounded up to a multiple of 16 bytes) */
// sizeof(struct global_data)=248(GD_SIZE 值), 最终top = 0X0091FF00 -> top=0X0091FA00
top = rounddown(top-sizeof(struct global_data), 16);
return top;
}
board_init.c中的board_init_f_init_reserve
void board_init_f_init_reserve(ulong base)
{
struct global_data *gd_ptr;
#ifndef _USE_MEMCPY
int *ptr;
#endif
/*
* clear GD entirely and set it up.
* Use gd_ptr, as gd may not be properly set yet.
*/
gd_ptr = (struct global_data *)base;
/* zero the area */
#ifdef _USE_MEMCPY
memset(gd_ptr, '\0', sizeof(*gd));
#else
for (ptr = (int *)gd_ptr; ptr < (int *)(gd_ptr + 1); )
*ptr++ = 0;
#endif
/* set GD unless architecture did it already */
#if !defined(CONFIG_ARM)
arch_setup_gd(gd_ptr);
#endif
/* next alloc will be higher by one GD plus 16-byte alignment */
base += roundup(sizeof(struct global_data), 16);
/*
* record early malloc arena start.
* Use gd as it is now properly set for all architectures.
*/
#if defined(CONFIG_SYS_MALLOC_F)
/* go down one 'early malloc arena' */
// arch/arm/include/asm/global_data.h中有
// #define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r9")
// 所以gd的指针来自这里
gd->malloc_base = base; // 16字节对齐后 gd->malloc_base=0X0091FB00这个也就是 early malloc 的起始地址
/* next alloc will be higher by one 'early malloc arena' size */
base += CONFIG_SYS_MALLOC_F_LEN;
#endif
}
ENTRY(c_runtime_cpu_setup)
/*
* If I-cache is enabled invalidate it
*/
#ifndef CONFIG_SYS_ICACHE_OFF
mcr p15, 0, r0, c7, c5, 0 @ invalidate icache
mcr p15, 0, r0, c7, c10, 4 @ DSB
mcr p15, 0, r0, c7, c5, 4 @ ISB
#endif
bx lr
ENDPROC(c_runtime_cpu_setup)
uboot启动过程 1的更多相关文章
- U-Boot启动过程完全分析
U-Boot启动过程完全分析 1.1 U-Boot工作过程 U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下: (1)第一阶段的功能 硬件设备初始化 加载U-Boot第二阶段 ...
- uboot启动过程理解
对于2440而言,启动的方式不多.一般就是外界一个NAND FLASH ,2440内部有个NAND FLASH Controller,会自动把NAND FLASH的前4K拷贝到2440的片内SRAM. ...
- U-Boot启动过程完全分析<转>
转载自:http://www.cnblogs.com/heaad/archive/2010/07/17/1779829.html 1.1 U-Boot工作过程 U-Boot启动内核的过程可 ...
- 【ARM-Linux开发】U-Boot启动过程--详细版的完全分析
---------------------------------------------------------------------------------------------------- ...
- U-Boot启动过程
开发板上电后,执行U-Boot的第一条指令,然后顺序执行U-Boot启动函数.看一下board/smdk2410/u-boot.lds这个链接脚本,可以知道目标程序的各部分链接顺序.第一个要链接的是c ...
- tiny4412学习之u-boot启动过程
这个文档简要分析了tiny4412自带的u-boot的启动过程,这个u-boot启用了mmu,并且命令的接收和执行方式跟以前的不同. 文档下载地址: http://pan.baidu.com/s/1s ...
- U-Boot 启动过程和源码分析(第二阶段)-main_loop分析
1> main_loop common/main.c /******************************************************************** ...
- Am335x u-boot 启动过程中的系统频率配置
Am335x的时钟结构分为:ADPLLS和ADPLLLJ 1.ADPLLS用来配置Core_CLK,Dispaly_clk,ARM系统CLK(mpu_clk),DDR PLLs_clk 2.ADPLL ...
- (一)U-Boot启动过程--详细版的完全分析
博客地址:http://blog.csdn.net/hare_lee/article/details/6916325
- (转载)U-boot启动完全分析
1.1 U-Boot工作过程 U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下: (1)第一阶段的功能 Ø 硬件设备初始化 Ø 加载U-Boot第二阶段代码到RAM空间 Ø 设置好栈 Ø ...
随机推荐
- 群晖NAS搭建外网可访问的calibre
一.在群晖docker上安装calibre-web 1. 下载相关的镜像文件 打开Docker后点击左侧注册表,在上方搜索栏搜索calibre 然后我们选择使用 technosoft2000/cali ...
- 解决linux mint内置无线网卡失效问题
前言 同学安装了linux mint,但是内置的无线网卡失效,只能通过有线网卡连接,经过查询得到不是缺少驱动的问题,是内核不支持 解决办法 sudo apt install linux-generic ...
- chrom jsonview的使用
在开发中,我们可能要为不同的系统提供接口,并以说明文档的形式提供接口说明,但我们提供的返回json往往会在页面上乱成一团. 这里我们推荐chrome浏览器的小插件jsonview,他不但有利于我们对接 ...
- 移除元素-LeetCode27 双指针
力扣链接:https://leetcode.cn/problems/remove-element/ 题目 给你一个数组 nums 和一个值 val,你需要 原地 移除所有数值等于 val 的元素,并返 ...
- 03.Javascript学习笔记2
1.逻辑运算符 在javascript中与或非对应的逻辑运算符是: && || ! const a = true; const b = false; console.log(a &am ...
- JAVA中的注解可以继承吗?
前言 注解想必大家都用过,也叫元数据,是一种代码级别的注释,可以对类或者方法等元素做标记说明,比如Spring框架中的@Service,@Component等.那么今天我想问大家的是类被继承了,注解能 ...
- Mac系统下word论文参考文献更新域
写论文的时候可能会遇到后续要增加文献的情况 在参考文献增加后会发现文章中的交叉引用的序号并没有更新 下面分享两种情况的处理方法 一.更新全部域 首先确认自己的打印️项是选中的 2. 打开word偏好 ...
- SQLMap入门——获取数据库的所有用户
列出数据库中的所有用户 在当前用户有权读取包含所有用户的表的权限时,使用该命令列出所有管理用户 python sqlmap.py -u http://localhost/sqli-labs-maste ...
- SQLMap入门——判断是否存在注入
假设目标注入点是http://127.0.0.1/sqli-labs-master/Less-1/?id=1,判断其是否存在注入的命令如下: python sqlmap.py -u http://12 ...
- 沁恒微(WCH)CH395/392配置使用,代码指南 网路接口芯片 CH395 CH392
CH395/CH392相关资料可以从官网下载具体连接可以看博客:WCH以太网相关芯片资料总结 里面是WCH官网相关信息的链接. 也可以去Gitee上下载:Gitee链接. STM32控制CH395的例 ...