ROS话题通信C++(附launch启动方式)
ROS话题通信C++(附launch启动方式)
创建工作空间
mkdir -p topic_ws/src
cd topic_ws
catkin_make
设置环境变量
source ./devel/setup.bash
source $ROS_PACKAGE_PATH
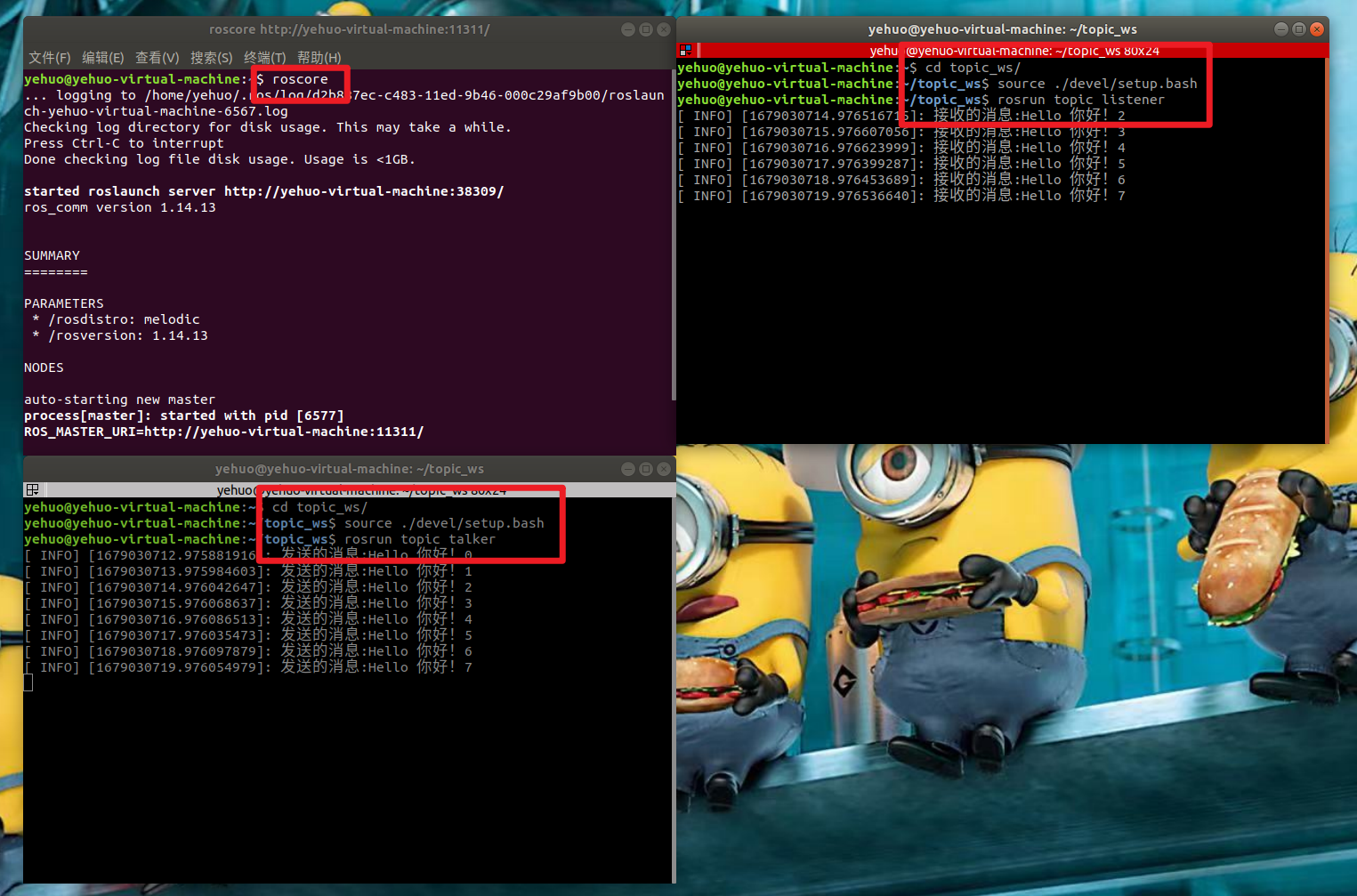
效果图
未使用launch
使用launch

结构总览

友情提醒
每一步编辑完,执行一下 Ctrl+Shift+B进行编译,及时排查错误
准备工作
第一步:创建工作空间
配置:roscpp rospy std_msgs
src/topic/CMakeLists.txt
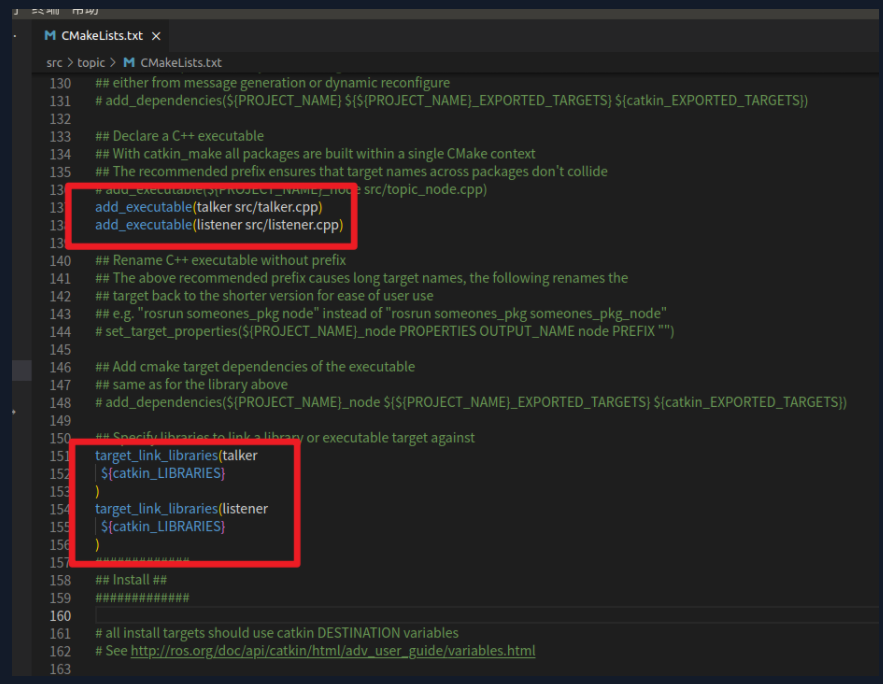
src/topic/src/talker.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h" //普通文本类型的消息
#include <sstream>
int main(int argc, char *argv[])
{
//设置编码
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(argc,argv,"talker");
//3.实例化 ROS 句柄
ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能
//4.实例化 发布者 对象
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",10);
//5.组织被发布的数据,并编写逻辑发布数据
//数据(动态组织)
std_msgs::String msg;
std::string msg_front = "Hello 你好!"; //消息前缀
int count = 0; //消息计数器
//逻辑(一秒10次)
ros::Rate r(1);
//节点
while (ros::ok())
{
//使用 stringstream 拼接字符串与编号
std::stringstream ss;
ss << msg_front << count;
msg.data = ss.str();
//发布消息
pub.publish(msg);
//加入调试,打印发送的消息
ROS_INFO("发送的消息:%s",msg.data.c_str());
//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;
r.sleep();
count++;//循环结束前,让 count 自增
//暂无应用
ros::spinOnce();
}
return 0;
}
src/topic/src/listener.cpp
// 1.包含头文件
#include "ros/ros.h"
#include "std_msgs/String.h"
void doMsg(const std_msgs::String::ConstPtr& msg_p){
ROS_INFO("接收的消息:%s",msg_p->data.c_str());
// ROS_INFO("我听见:%s",(*msg_p).data.c_str());
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
ros::init(argc,argv,"listener");
//3.实例化 ROS 句柄
ros::NodeHandle nh;
//4.实例化 订阅者 对象
ros::Subscriber sub = nh.subscribe<std_msgs::String>("chatter",10,doMsg);
//5.处理订阅的消息(回调函数)
//6.设置循环调用回调函数
ros::spin();//循环读取接收的数据,并调用回调函数处理
return 0;
}
启动指令
1、第一个终端执行 roscore
2、第二个终端进入topic_ws的路径
3、执行 source ./devel/setup.bash
4、执行 rosrun topic talker
5、第三个终端进入topic_ws的路径
6、执行 source ./devel/setup.bash
7、执行 rosrun topic listener
使用launch
src/topic/launch/start_topic.launch
<launch>
<node pkg="topic" type="talker" name="talker" output="screen"/>
<node pkg="topic" type="listener" name="listener" output="screen"/>
</launch>
启动指令
1、roscore
2、进入topic_ws的路径
3、source ./devel/setup.bash
4、roslaunch topic start_topic.launch
made by zyl
ROS话题通信C++(附launch启动方式)的更多相关文章
- (六)ROS话题---节点之间通信的方式
1. 理解 ROS 话题: (Ctrl+Alt+T 打开一个新终端) 运行下面的命令: $ roscore (Ctrl+Alt+T 打开一个新终端) $ rosrun turtlesim turtle ...
- ROS Learning-010 beginner_Tutorials 编写简单的启动脚本文件(.launch 文件)
ROS Indigo beginner_Tutorials-09 编写简单的启动脚本文件 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.0 ...
- jenkins:新增节点是启动方式没有Launch agent by connecting it to the master
默认在这里的配置是禁用 所以启动方式只有两种,缺少Launch agent by connecting it to the master
- ROS Learning-008 beginner_Tutorials ROS话题
ROS Indigo beginner_Tutorials-07 ROS话题 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- ROS Learning-011 beginner_Tutorials (编程) 编写 ROS 话题版的 Hello World 程序(Python版)
ROS Indigo beginner_Tutorials-10 编写 ROS 话题版的 Hello World 程序(Python版) 我使用的虚拟机软件:VMware Workstation 11 ...
- ROS串口通信
身处机器人行业,不想一直只做低端的单片机控制,老是待在舒适区,所以一直都想学一下ROS系统,但看了几个月资料后,感觉还是云里雾里,似懂非懂,感念似乎都很清楚,但要实际去做,却又感觉无从下手. 于是想先 ...
- 4.7 ROS分布式通信
4.7 ROS分布式通信 ROS是一个分布式计算环境.一个运行中的ROS系统可以包含分布在多台计算机上多个节点.根据系统的配置方式,任何节点可能随时需要与任何其他节点进行通信. 因此,ROS对网络配置 ...
- Hive 学习笔记(启动方式,内置服务)
一.Hive介绍 Hive是基于Hadoop的一个数据仓库,Hive能够将SQL语句转化为MapReduce任务进行运行. Hive架构图分为以下四部分. 1.用户接口 Hive有三个用户接口: 命令 ...
- Service 简介 启动方式 生命周期 MD
Markdown版本笔记 我的GitHub首页 我的博客 我的微信 我的邮箱 MyAndroidBlogs baiqiantao baiqiantao bqt20094 baiqiantao@sina ...
- 如何用INNO安装添加快捷启动方式到Win7的快速启动栏(超级任务栏)
问题:如何用INNO安装添加快捷启动方式到Win7的快速启动栏(超级任务栏) 在XP下,添加方式是直接把快捷方式复制到%appdata%\Microsoft\Internet Explorer\Qui ...
随机推荐
- BUG级别及测试准入、暂停及准出原则
一.BUG级别说明: BUG分5个严重级别:紧急.严重.重要.次要和微小.具体描述如下: 紧急: 1) 错误导致了死机.服务器500.系统悬挂无法操作 2) 数据库连接异常 3) 临近上线时间点需求变 ...
- IDEA-mybatis逆向工程使用
首先我们需要安装mybatis逆向工程插件mybatis Generator: 然后在pom.xml文件中添加逆向工程插件: <!--mybatis逆向工程插件--> <plugin ...
- 通过modbus+socket+GPRS采集硬件数据
# !/usr/bin/python # -*- coding: UTF-8 -*- import sys import os TESTCASE = os.path.dirname(os.path.a ...
- SQLite 帮助类
public static class SqliteHelper { /// <summary> /// 获得连接对象 /// </summary> /// <retur ...
- Treewidget节点的删除
父节点的删除 // 第一种 // 树状列表父节点的删除 // 有点莽 不支持这种操作 delete ui->treeWidget->topLevelItem(0); // 第二种 QTr ...
- angular项目语言切换功能
1.NzI18nService服务 参考:https://ng.ant.design/docs/i18n/zh 2.ngx-translate插件 1)安装依赖 npm install @ngx-tr ...
- 生成Funnel漏斗图
-----------第一步----------- import jsonlist_p = [{"action":"浏览商品","PV":5 ...
- python常用数据类型方法详解
str类型 count('str',begin_index,ending_index) 在s字符串中统计str出现的次数 s.endswith('str') 判断s字符串是否是已str字符串结尾,为真 ...
- [Leetcode 111]二叉树的最短深度 BFS/DFS
题目 给定二叉树,求最短路径包含的节点个数 https://leetcode.com/problems/minimum-depth-of-binary-tree/ Given a binary tre ...
- Lenovo Vantage 完全卸载
Lenovo Vantage 完全卸载 我的T480,最近因为在休眠状态下断电导致不开机,按开机键所有灯闪烁.翻阅百度发现居然是通病,自从 type-c 供电方案以来就有,无奈只有被奸商坑了350,只 ...