MTK LCM的添加
对于LCM驱动移植,一般分为三部曲:
1、硬件IO口配置;
2、确保LCM背光能够正常点亮;
3、LCM驱动移植;
硬件电路:
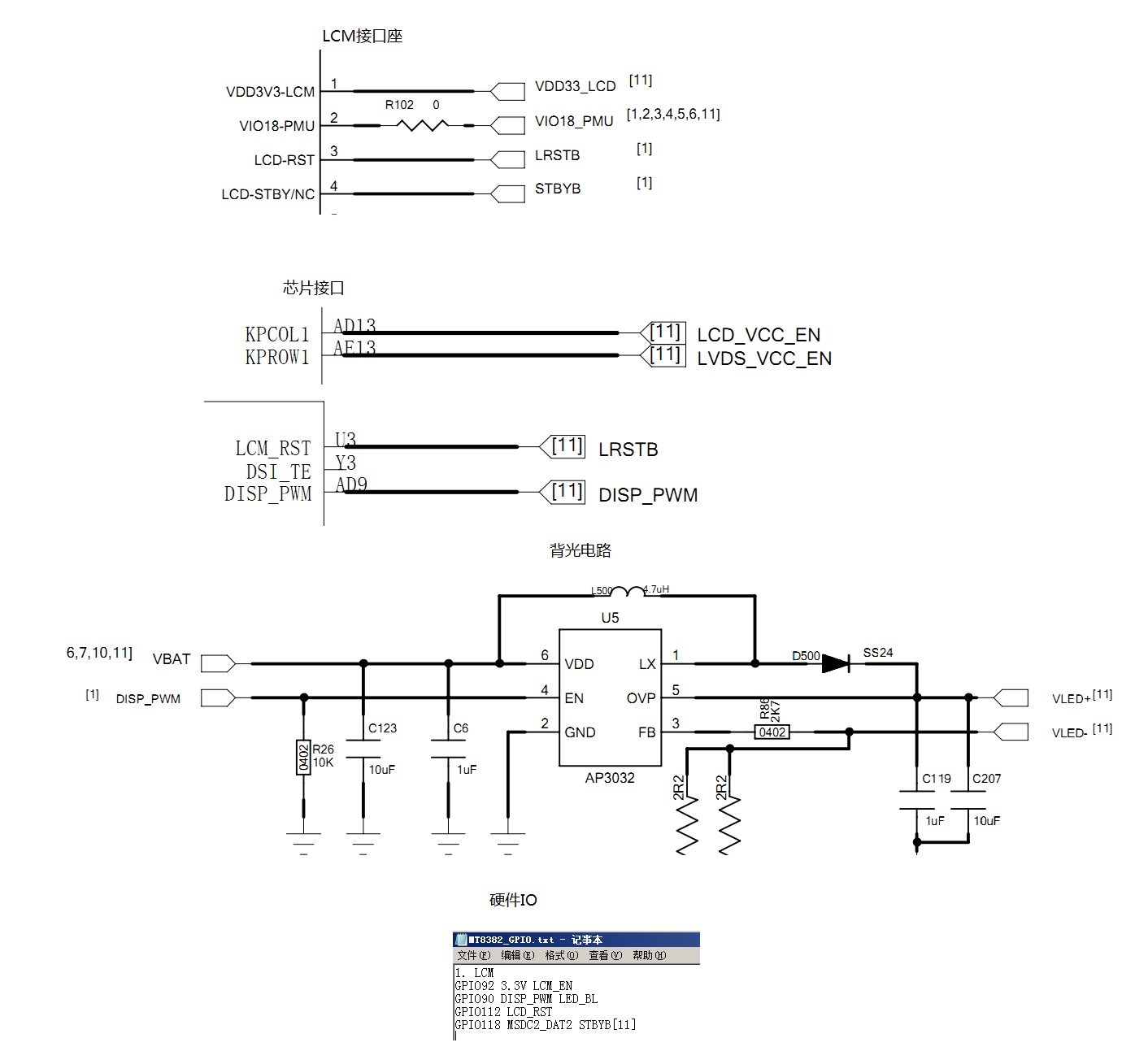
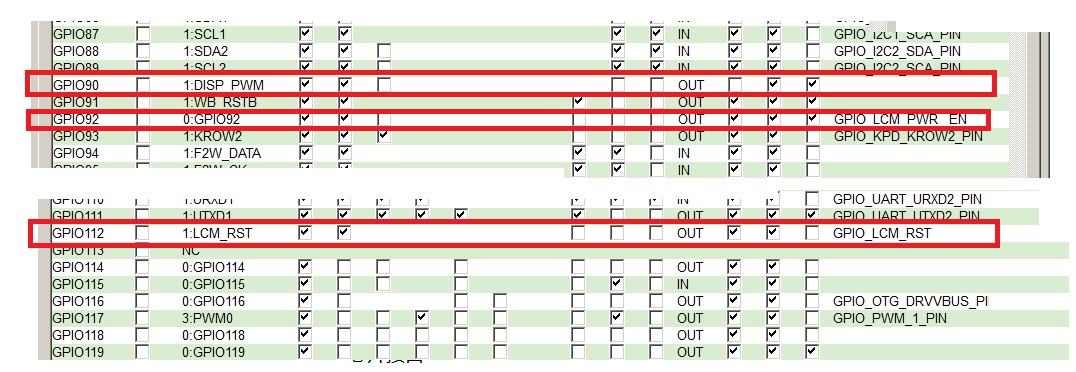
1、GPIO配置
打开 mediatek\dct\DrvGen.exe
选择 mediatek\custom\xiaoxi\kernel\dct\dct\codegen.dws 配置文件
配置LCM PWM引脚、RST复位引脚、DISP_PWM引脚和LCM电源控制引脚
2、背光灯
编译烧录后启动系统,验证LCM背光是否能正常点亮,否则无法继续调试LCD;
3、LCM驱动移植(以ili9806e为例)
(1)、在mediatek\custom\common\kernel\lcm目录下创建ili9806目录,将驱动文件拷贝到驱动文件ili9806.c到新创建的目录中;代码自动将lcm软链接到mediatek\custom\common\lk和mediatek\custom\common\uboot目录,因此无需拷贝驱动文件到lk和uboot中;
(2)、修改\mediatek\custom\common\kernel\lcm\mt65xx_lcm_list.c, 在lcm_driver_list 数组中增加:
extern LCM_DRIVER ili9806e_lcm_drv;
#if defined(ILI9806)
&ili9806e_lcm_drv, //就是ili9488.c中的LCM_DRIVER结构
#endif
(3)、打开mediatek\config\prj\ProjectConfig.mk修改:
BUILD_LK=yes
CUSTOM_KERNEL_LCM=ili9806 //对应lcm目录驱动的子目录名
CUSTOM_LK_LCM=ili9806 //对应lcm目录驱动的子目录名
CUSTOM_UBOOT_LCM=ili9806 //对应lcm目录驱动的子目录名
LCM_WIDTH=480
LCM_HEIGHT=800
系统编译的时候,编译器会根据CUSTOM_KERNEL_LCM、CUSTOM_LK_LCM、CUSTOM_UBOOT_LCM找到mediatek\custom\common\kernel\lcm\ili9806目录,拷贝mediatek\custom\out\pro\kernel\lcm目录,参与系统的编译,所以对于驱动文件名有没命名要求;lk和uboot同理;
注:系统此时也会产生ILI9806的环境变量,这就是mt65xx_lcm_list.c中的 #if defined(ILI9806) 可以进行预编译处理;
4、LCM驱动简要解析
LCM_DRIVER结构表示一个LCM对象,里边包含LCM各项参数;
- LCM_DRIVER ili9806e_drv =
- {
- .name = "ili9806e_txd_dsi_cmd_sp13_lcm_drv", //设备名
- .set_util_funcs = lcm_set_util_funcs, //获取LCM_DRIVER结构
- .get_params = lcm_get_params, //获取lcm参数
- .init = lcm_init, //lcm初始化函数
- .suspend = lcm_suspend, //lcm挂起
- .resume = lcm_resume, //lcm恢复
- .compare_id = lcm_compare_id, //设备id匹配
- };
以上函数接口是为MTK框架中的几个重要接口;
/* 获取设备的LCM_DRIVER结构 */
- static void lcm_set_util_funcs(const LCM_UTIL_FUNCS *util)
- {
- memcpy(&lcm_util, util, sizeof(LCM_UTIL_FUNCS));
- }
- /* 获取lcm各个参数 */
- static void lcm_get_params(LCM_PARAMS *params)
- {
- memset(params, 0, sizeof(LCM_PARAMS)); //先将LCM_PARAMS结构清空
- params->type = LCM_TYPE_DSI; //lcm接口类型
- params->width = FRAME_WIDTH; //lcm显示宽度
- params->height = FRAME_HEIGHT; //lcm显示高度
- /* 设置通信模式 */
- // enable tearing-free
- params->dbi.te_mode = LCM_DBI_TE_MODE_DISABLED;
- params->dbi.te_edge_polarity = LCM_POLARITY_RISING;
- /* dsi分两种模式,一种是cmd模式,一种是video模式 */
- #if (LCM_DSI_CMD_MODE)
- params->dsi.mode = CMD_MODE;
- #else
- params->dsi.mode = SYNC_PULSE_VDO_MODE;
- #endif
- /* 设置数据格式 */
- // DSI
- /* Command mode setting */
- params->dsi.LANE_NUM = LCM_TWO_LANE; //两通道MIPI
- //The following defined the fomat for data coming from LCD engine.
- params->dsi.data_format.color_order = LCM_COLOR_ORDER_RGB;
- params->dsi.data_format.trans_seq = LCM_DSI_TRANS_SEQ_MSB_FIRST;
- params->dsi.data_format.padding = LCM_DSI_PADDING_ON_LSB;
- params->dsi.data_format.format = LCM_DSI_FORMAT_RGB888;
- // Highly depends on LCD driver capability.
- // Not support in MT6573
- params->dsi.packet_size = 256;
- // Video mode setting
- params->dsi.intermediat_buffer_num = 0;
- params->dsi.PS = LCM_PACKED_PS_24BIT_RGB888;
- params->dsi.word_count = 480 * 3;
- /* 垂直参数设置 */
- params->dsi.vertical_sync_active = 4; //垂直同步信号的宽度
- params->dsi.vertical_backporch = 16;//10 //垂直同步信号的后沿
- params->dsi.vertical_frontporch = 20;//8 //垂直同步信号的前沿
- params->dsi.vertical_active_line = FRAME_HEIGHT;
- /* 水平参数设置 */
- params->dsi.horizontal_sync_active = 10; //水平同步信号的宽度
- params->dsi.horizontal_backporch = 50; //水平同步信号的后沿
- params->dsi.horizontal_frontporch = 60; //水平同步信号的前沿
- params->dsi.horizontal_active_pixel = FRAME_WIDTH;
- /* 时钟频率 */
- params->dsi.PLL_CLOCK= 200;
- }
//复位引脚
#define SET_RESET_PIN(v) (lcm_util.set_reset_pin((v))) //这里就会直接使用GPIO_LCD_RST硬引脚
//延时函数
#define UDELAY(n) (lcm_util.udelay(n))
#define MDELAY(n) (lcm_util.mdelay(n))
/* 数据传输接口 */
//long packet 操作接口
#define dsi_set_cmdq_V3(para_tbl, size, force_update)
lcm_util.dsi_set_cmdq_V3(para_tbl, size, force_update)
//para_tbl:LCM_setting_table结构, size:大小, force_update:强制更新标志
#define dsi_set_cmdq_V2(cmd, count, ppara, force_update)
lcm_util.dsi_set_cmdq_V2(cmd, count, ppare, force_update) //cmd:命令,
count:大小, ppara:参数,force_update:强制更新标志
//short packet 操作接口
#define dsi_set_cmdq(pdata, queue_size, force_update) lcm_util.dsi_set_cmdq(pdata, queue_size, force_update)
//读写寄存器等操作
#define write_cmd(cmd) lcm_util.dsi_write_cmd(cmd)
#define write_regs(addr, pdata, byte_nums) lcm_util.dsi_write_regs(addr, pdata, bytes_nums)
#define read_reg(cmd) lcm_util.dsi_dcs_read_lcm_reg(cmd)
#define read_reg_v2(cmd, buffer, buffer_size) lcm_util.dsi_dcs_read_lcm_reg_v2(cmd, buffer, buffer_size)
/* 初始化参数及函数接口 */
- static struct LCM_setting_table lcm_initialization_setting[] = {
- /* 数据格式:命令,数据个数,数据 */ //命令一般是对应寄存器地址
- {0xFF, 5,{0xFF,0x98,0x06,0x04,0x01}},
- {0x08, 1, {0x10}},
- {0x21, 1, {0x01}},
- {0x30, 1, {0x02}},
- {0x31, 1, {0x02}},
- {0x40, 1, {0x16}},
- {0x41, 1, {0x22}},
- ......
- {0x53, 1, {0x1A}}, //10
- {0xFF, 5,{0xFF,0x98,0x06,0x04,0x07}},
- {0x17, 1, {0x12}}, //22
- {0x02, 1, {0x77}},
- {0xFF, 5,{0xFF,0x98,0x06,0x04,0x00}},
- {0x35,1, {0x00}},
- {0x36,1, {0x03}}, //翻转180度
- {0x11, 1, {0x00}},
- {REGFLAG_DELAY, 120, {}},
- {0x29, 1, {0x00}},
- {REGFLAG_DELAY, 50, {}},
- {REGFLAG_END_OF_TABLE, 0x00, {}} //数据结束必须使用REGFLAG_END_OF_TABLE
- };
- static void lcm_init(void)
- {
- /* 复位 */
- SET_RESET_PIN(1);
- MDELAY(10);
- SET_RESET_PIN(0);
- /* Third change Lava */
- MDELAY(10);//10
- SET_RESET_PIN(1);
- MDELAY(120); // 150
- /* 初始化数据 */
- push_table(lcm_initialization_setting, sizeof(lcm_initialization_setting) / sizeof(struct LCM_setting_table), 1);
- }
/* 设备挂起 */
- static void lcm_suspend(void)
- {
- #ifdef BUILD_LK
- printf("%s, ALS/PS bbbbbbbbbbbbbbb \n", __func__);
- #else
- printk("%s, ALS/PS bbbbbbbbbbbbbb \n", __func__);
- #endif
- push_table(lcm_deep_sleep_mode_in_setting, sizeof(lcm_deep_sleep_mode_in_setting) / sizeof(struct LCM_setting_table), 1);
- SET_RESET_PIN(0);
- MDELAY(20);//10
- SET_RESET_PIN(1);
- MDELAY(50);
- }
因为lcm驱动被映射到lk层,在lk层只能使用printf进行调试,但在kernel层中只能printk进行打印调试,所以可以使用宏进行BUILD_LK区分;
挂起的机制一般有两种:简单睡眠或深度睡眠;
简单睡眠:设备还处于工作状态,可以被唤醒,但是此时也会存在待机功耗等问题;
深度睡眠:设备处于休眠状态,基本处于不工作状态,因此无法被唤醒;
一般程序设计都是使用深度睡眠,在唤醒时进行重新初始化;
/* 设备恢复 */
- static void lcm_resume(void)
- {
- lcm_init();
- //push_table(lcm_sleep_out_setting, sizeof(lcm_sleep_out_setting) / sizeof(struct LCM_setting_table), 1);
- }
重新初始化设备
/* 设备id匹配 */
- static unsigned int lcm_compare_id()
- {
- unsigned int array[4];
- unsigned char buffer[4] = {0,0,0,0};
- unsigned char id_high=0;
- unsigned char id_low=0;
- unsigned char id_low0=0;
- unsigned int id=0;
- /* 先进行复位操作 */
- SET_RESET_PIN(1);
- MDELAY(10);
- SET_RESET_PIN(0);
- MDELAY(10);
- SET_RESET_PIN(1);
- MDELAY(200);
- //*************Enable CMD2 Page1 *******************//
- array[0]=0x00063902;
- array[1]=0x0698ffff;
- array[2]=0x00000104;
- dsi_set_cmdq(array, 3, 1);
- array[0] = 0x00043700;
- dsi_set_cmdq(array, 1, 1);
- MDELAY(10);
- read_reg_v2(0x00, buffer, 4);
- id_high = buffer[0]; //98
- array[0] = 0x00043700;
- dsi_set_cmdq(array, 1, 1);
- MDELAY(10);
- read_reg_v2(0x01, buffer, 4);
- id_low = buffer[0]; //06
- array[0] = 0x00043700;
- dsi_set_cmdq(array, 1, 1);
- MDELAY(10);
- read_reg_v2(0x02, buffer, 4);
- id_low0 = buffer[0]; //04
- id = (id_high<<16) | (id_low<<8)|id_low0;
- #ifdef BUILD_LK
- printf("ILI9806e:id2=%x.\n",id);
- printf("ILI9806e:id4=%x.\n",id_high);
- printf("ILI9806e:id5=%x.\n",id_low);
- printf("ILI9806e:id5=%x.\n",id_low0);
- #else
- printk("ILI9806e:id=%x.\n",id);
- printk("ILI9806e:id_high=%x.\n",id_high);
- printk("ILI9806e:id_low=%x.\n",id_low);
- printk("ILI9806e:id_low=%x.\n",id_low0);
- #endif
- return (0x980604 == id) ? 1 : 0;
- }
数据编写格式是遵循MIPI协议进行编写的
注:如果系统只配置一个lcm设备,lcm_compare_id接口不会调用,只有系统存在多个设备的是才会调用该接口进行匹配;
MTK LCM的添加的更多相关文章
- mtk lcm驱动加载流程 (转载)
平台:mt6582 + Android 4.4 前面就说过,在mtk代码中支持屏是可兼容的,通过调用驱动中的compare_id函数来匹配驱动和屏,这里来细看一下代码. 1. LK部分(mediate ...
- MTK 自定义按键添加广播
一.给自定义按键添加广播 修改PhoneWindowManager.java中的interceptKeyBeforeDispatching方法 /frameworks/base/policy/src/ ...
- MTK LCM帧率设置公式
clk=(width + W total porch)x(height + H total porch)x (6<18bit>或者x8<24bit>)x fps/ lane n ...
- MTK TP手势添加
old: #include "tpd.h" #include "tpd_custom_gt9xx.h" #ifndef TPD_NO_GPIO #include ...
- MTK-TP(触屏)解读一
MTK中的TP代码结构并不复杂,相比于其他的系统更为的简单些.它使用的是input子系统,通过该系统来上报触摸按键. 首先我们来看看TP的文件夹下的各代码文件的功能. 文件名 具体功能 关系文件 tp ...
- 1、硬件IO口配置;
对于MTK TP驱动移植一般分为六部分: 1.硬件IO口配置: 2.TP驱动移植. 3.I2C通信: 4.中断触发: 5.数据上报: 6.虚拟按键. 硬件电路: 1.GPIO配置 打开 mediate ...
- 123_Power Pivot&Power BI DAX函数说明速查
博客:www.jiaopengzi.com 焦棚子的文章目录 请点击下载附件 说明 1.基于DAX Studio 2.9.2版本导出整理: 2.DAX Studio网站,及时更新下载,DAX学习利器: ...
- mtk android lcm调试
参考MTK 文档LCM_Customer_document_MT6575.pdf The following shows the steps to add a new LCM driver: (1) ...
- MTK Android4.0.3 ICS 添加缅甸语Myanmar
最近几个项目需要添加缅甸语,借助网络资源,同时结合自身实践,成功添加缅甸语,现分享经验如下. 一. 前期工作: 准备Myanmar字库,下载地址:http://www.myordbok.com/mya ...
随机推荐
- c++语言的设计和演化---在线函数
开始的c++语言中引入inline函数的目的是处理一些实时的情况,而普通的函数调用的开销无法被接受. 起初是在类的声明中定义inline函数,也只支持成员函数,后来才支持非成员函数:
- 2017.07.06【NOIP提高组】模拟赛B组
Summary 今天比赛感觉题目很奇葩,都可以用许多简单方法来做,正确性都显然,当然也有点水,也就是说是考我们的数感和数学知识,而程序,只是代码的体现. 这次的时间安排感觉不错,因为很快就打完最后一道 ...
- Eclipse 安装Maven插件m2eclipse
Eclipse->Help->Install New Software->Work with右边Add按钮->Name字段中输入m2e,Location字段中输入http:// ...
- C盘清理(安装Visual Studio 或者Office后)
安装过Office,可能会存在一个C:\\MSOCache的隐藏目录,如果在D盘安装,这个文件夹可能会在D盘根目录下.该目录为Offices安装组件的目录,理解为安装包即可,如果日后不再修改OFFIC ...
- JavaScript关于函数对象的一些学习总结
1.概述 在Java语言中,我们可以定义自己的类,并根据这些类创建对象来使用,在Javascript中,我们也可以定义自己的类,例如定义User类.Hashtable类等等. 目前在Javascrip ...
- Install latest git on CentOS 6/7
Assuming you have sudo/root permission. Try rpmforge-extras first. yum --disablerepo=base,updates -- ...
- 中国地图(Highmaps)
1.中国地图省份和市 调用的包( <script src="https://img.hcharts.cn/jquery/jquery-1.8.3.min.js">< ...
- openstack 之~openstack各组件关系
认识openstack 第一:openstack是什么? OpenStack是一个由NASA(美国国家航空航天局)和Rackspace合作研发并发起的,以Apache许可证授权的自由软件和开放源代码项 ...
- 下载Android kernel
方法一: https://source.android.com/setup/building-kernels 方法二: 在按照https://source.android.com/setup/down ...
- 最课程阶段大作业06:U度节能平台控制系统
除了互联网项目,当今社会还有一个概念非常流行,那就是:物联网.什么是物联网?物联网是通过传感设备,按约定的协议,把任意物品与互联网相连接,进行信息交换和通信,以实现智能化识别.定位.跟踪.监控和管理的 ...