ROS教程2 编写简单的消息发布器和订阅器 (C++ catkin)
创建工作环境
创建文件夹,创建包
mkdir -p ~/catkin_arduino_ros/src catkin_create_pkg test1_pub_sub std_msgs rospy roscpp
在桌面打开终端,添加工作路径
echo "source /home/dongdong/catkin_arduino_ros/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
创建项目文件
1创建src/talker.cpp文件
cd ~/catkin_arduino_ros/src
gedit talker.cpp
复制代码
#include "ros/ros.h"
#include "std_msgs/String.h" #include <sstream> int main(int argc, char **argv)
{ ros::init(argc, argv, "talker"); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); ros::Rate loop_rate(10); int count = 0;
while (ros::ok())
{ std_msgs::String msg; std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep();
++count;
} return 0;
}
保存
2创建src/listener.cpp文件
gedit listener.cpp
复制源代码
#include "ros/ros.h"
#include "std_msgs/String.h" void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg->data.c_str());
} int main(int argc, char **argv)
{ ros::init(argc, argv, "listener"); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); ros::spin(); return 0;
}
编译节点
更改编译文件
在CMakeLists.txt文件末尾加入几条语句:
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
编译
cd ~/catkin_arduino_ros/
catkin_make
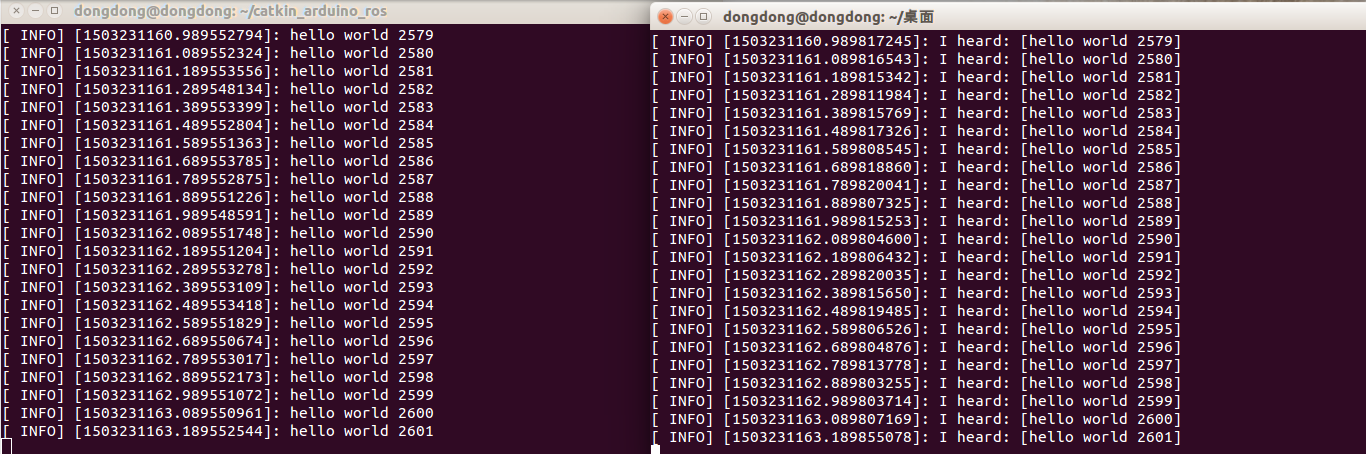
运行节点
//分别打开三个窗口
roscore rosrun test1_pub_sub talker rosrun test1_pub_sub listener
ROS教程2 编写简单的消息发布器和订阅器 (C++ catkin)的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——5.编写简单的消息发布器和订阅器
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS学习(十二)—— 编写简单的消息发布器和订阅器(C++)
一.创建发布器节点 1 节点功能: 不断的在ROS网络中广播消息 2 创建节点 (1)打开工作空间目录 cd ~/catkin_ws/src/beginner_tutorials 创建一个发布器节点( ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS Learning-010 beginner_Tutorials 编写简单的启动脚本文件(.launch 文件)
ROS Indigo beginner_Tutorials-09 编写简单的启动脚本文件 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.0 ...
- ROS 消息发布器和订阅器Publisher, Subscriber
博客参考:https://www.2cto.com/kf/201705/639776.html 1.编写发布器节点节点(Node) 是指 ROS 网络中可执行文件.接下来,将会创建一个发布器节点(“t ...
- ROS:消息发布器和订阅器(c++)
学习资料主要源自http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 $ roscd beginner_t ...
- 用C++编写发布器和订阅器节点
1.转移到之前教程在catkin工作空间所创建的package路径下: $ roscd package_name/ 例子:$ roscd practice/2.在package路径下创建src目录: ...
- 编写简单的ramdisk(选择IO调度器)
前言 目前linux中包含anticipatory.cfq.deadline和noop这4个I/O调度器.2.6.18之前的linux默认使用anticipatory,而之后的默认使用cfq.我们在前 ...
- ROS手动编写消息发布器和订阅器topic demo(C++)
1.首先创建 package cd ~/catkin_ws/src catkin_create_pkg topic_demo roscpp rospy std_msgs 2. 编写 msg 文件 cd ...
随机推荐
- [转]VR原理讲解及开发入门
本文转自:http://www.52vr.com/article-661-1.html 本文是作者obuil根据多年心得专门为想要入门的VR开发者所写,由52VR网站提供支持. 1. VR沉浸感和 ...
- webpack 学习总结demo
github源码地址 https://github.com/ghshuo/webpack-demo webpack介绍 webpack 是一个现代 JavaScript 应用程序的静态模块打包器(mo ...
- MSSQL存储过程应用
1.原始表inoutinfo 2.现在想输入时间范围和操作类型输出对应的结果 2.1创建存储过程 create proc selecttype@type nvarchar(10),@starttime ...
- 微信公众号开发--.Net Core实现微信消息加解密
1:准备工作 进入微信公众号后台设置微信服务器配置参数(注意:Token和EncodingAESKey必须和微信服务器验证参数保持一致,不然验证不会通过). 2:基本配置 设置为安全模式 3.代码实现 ...
- WebApi接口传参
目前接口统一使用 [FromBody]Dictionary<string,string> req 来接收. 有时候,需要把从req字典提取多个字段赋值给 model,几个还好,几十个赋值就 ...
- 【转】Git 教程之协同开发
前面我们已经介绍过远程仓库的相关概念,不过那时并没有深入探讨,只是讲解了如何创建远程仓库以及推送最新工作成果到远程仓库,实际上远程仓库对于团队协同开发很重要,不仅仅是团队协同开发的基础,也是代码备份的 ...
- 在UWP中自定义半边框样式的输入框
Windows10发布已经有一阵子了,已经有一些公司上架了自己的UWP应用程序,为WindowsStore增添光彩.已经安装Windows10的用户也或多或少的安装了一些UWP的应用程序,针对这些UW ...
- canvas-star4.html
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- 虚拟机安装ubuntu18.04及其srs服务器的搭建
第一次写博客,有些地方可能不太完善. 1.安装VMware,我用的是VMware12. 2.下载Ubuntu镜像(自Ubuntu 17.10开始桌面版本不再提供32位安装镜像,Ubuntu Serve ...
- 【读书笔记】iOS-流式音频与Pandora Radio之路
复杂性是不可避免的,而且只会随时间增长,所以在增加特性时一定要为重构和代码简化留出时间.真正遇到问题这前先不要担心性能.iPhone非常强壮,你可能永远也不会遇到预想的性能问题. 能过互联网向一个设备 ...