SLAM
|__all together ship
|__SLAM__
|__Graph SLAM__
|__完成约束
|__完成Graph SLAM__
| |__完成约束(格子)
| |__加入地标
|
|__ Ω和§
| |__编程(Init_pos,move1,move2)
| |__加入检测(加入每次测量Z0,Z1,Z2)
|__引入噪音
|__完整的SLAM编程
PID:P的主要功能是让误差最小,因为转向角正比于误差。D使用得当能避免超调。系统漂移与偏置最好用I解决。
是时候了,put all together to make a system,这个系统采用车辆模型,并且使用了之前的robot类,得到连续空间里的最短路径
steering_noise = 0.1
distance_noise = 0.03
measurement_noise = 0.3 class robot:
def __init__(self,length = 0.5):
self.x = 0.0
self.y = 0.0
self.orientation = 0.0
self.length = length
self.steering_noise = 0.0
self.distance_noise = 0.0
self.measurement_noise = 0.0
self.num_collisions = 0
self.num_steps = 0 def set(self,new_x,new_y,new_orientation):
self_x = float(new_x)
self_y = float(new_y)
self_orientation = float(new_orientation) % (2.0*pi) def set_noise(self,new_s_noise,new_d_noise,new_m_noise):
self.steering_noise = float(new_s_noise)
self.distance_noise = float(new_d_noise)
self.measurement_noise = float(new_m_noise) def check_collisions(self,grid): #检查是否与网格碰撞
for i in range(len(grid)):
for j in range(len(grid[0])):
if grid[i][j] == 1:
dist = sqrt((self.x - float(i))**2 +
(self.y - float(j) )**2)
if dist < 0.5:
num_collisions+=1
return False
return True def check_goal(self,goal,threshold = 1.0): #检查是否到达目标(threshold阀值)
dist = sqrt((float(i) - self.x)**2 +
(float(j) - self.y)**2 )
return goal < threshold def move(self,grid,steering,distance
tolerance = 0.001,max_steering_angle = pi/4.0):
if steering > max_steering_angle:
steering = max_steering_angle
if steering < -max_steering_angle:
steering = -max_steering_angle
if distance < 0.0:
distance = 0.0 # make a new copy
res = robot()
res.length = self.length
res.steering_noise = self.steering_noise
res.distance_noise = self.distance_noise
res.measurement_noise = self.measurement_noise
res.num_collisions = self.num_collisions
res.num.step = self.num_step + 1 #应用 noise
steering2 = random.guass(steering,self.steering_noise)
distance2 = random.guass(distance,self.distance_noise) #执行motion
turn = tan(steering2)*distance2 / res.length
if abs(turn) < tolerance:
res.x = self.x + (distance2*cos(self.orientation))
res.y = self.y + (distance2*sin(self.orientation))
res.orientation = (self.orientation + turn) % (2.0*pi)
else:
radius = distance2 / turn
cx = self.x-(sin(self.orientation) * radius)
cy = self.x+(cos(self.orientation) * radius)
res.orientation = (self.orientation + turn) % (2*pi)
res.x = cx +(sin(res.orientation) * radius)
res.y = cy - (cos(res.orientation) * radius)
return res def sense(self):
return [random.guass(self.x,self.measurement_noise),
random.guass(self.y,self.measurement_noise)] def measurement_prob(self, measurement):
error_x = measurement[0] - self.x
error_y = measurement[1] - self.y
error = exp(- (error_x ** 2) / (self.measurement_noise ** 2) / 2.0) / sqrt(2.0 * pi * (sigma ** 2))
error*= exp(- (error_y ** 2) / (self.measurement_noise ** 2) / 2.0) / sqrt(2.0 * pi * (sigma ** 2))
return error def __repr__(self):
return '[x=%.5s y=%.5s orient=%.5s]' % (self.x,self.y,self.orientation) #输入数据和参数
grid = [[0, 1, 0, 0, 0, 0],
[0, 1, 0, 1, 1, 0],
[0, 1, 0, 1, 0, 0],
[0, 0, 0, 1, 0, 1],
[0, 1, 0, 1, 0, 0]]
init = [0,0]
goal = [len(gird) - 1,len(grid[0])-1] myrobot = robot()
myrobot.set_noise(steering_noise,distance_noise,measurement_noise) while not myrobot.check_goal(goal):
theta = atan2(goal[1] - myrobot.y,goal[0] - myrobot.x) -myrobot.orientation
myrobot = myrobot.move(grib,theta,0.1)
if not myrobot.check_collision(grib):
print ####Collision####
main()会调用A*、路径平滑算法和在run里面的控制器,控制器里有粒子滤波算法。这里会有一个循环来计算轨迹误差CTE,只用了PD
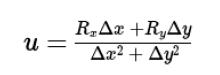
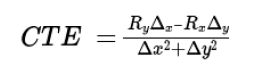
theta和P(x,y)是粒子滤波器输出的定位,cte是误差,U是行驶的路程可由点积求出,然后求的小u是用分母归一化后的结果,只要大于1就说明超过了线段,到了下一个线段(每一小步的线段)。CTE同样方式得出。然后程序化这些数学公式,这里设置了一个index变量,当U超过1时,index就要加1,以防超过线段,下面的程序输出一段有效的,不会碰撞的路径,返回值有是否成功、碰撞次数、步数。有时候也会极少发生碰撞,因为障碍物较多,系统噪音的影响。
from math import *
import random steering_noise = 0.1
distance_noise = 0.03
measurement_noise = 0.3 #------------------------------------------------
#
# this is the plan class
class plan:
# init:creates an empty plan
def __init__(self, grid, init, goal, cost = 1):
self.cost = cost
self.grid = grid
self.init = init
self.goal = goal
self.make_heuristic(grid, goal, self.cost)
self.path = []
self.spath = [] #-------------------------------------------------------
# make heuristic function for a grid
def make_heuristic(self, grid, goal, cost):
self.heuristic = [[0 for row in range(len(grid[0]))]
for col in range(len(grid))]
for i in range(len(self.grid)):
for j in range(len(self.grid[0])):
self.heuristic[i][j] = abs(i - self.goal[0]) + \
abs(j - self.goal[1]) #--------------------------------------------------------
# A* for searching a path to the goal
def astar(self):
if self.heuristic == []:
raise ValueError, "Heuristic must be defined to run A*" # internal motion parameters
delta = [[-1, 0], # go up
[ 0, -1], # go left
[ 1, 0], # go down
[ 0, 1]] # do right # open list elements are of the type: [f, g, h, x, y]
closed = [[0 for row in range(len(self.grid[0]))]
for col in range(len(self.grid))]
action = [[0 for row in range(len(self.grid[0]))]
for col in range(len(self.grid))] closed[self.init[0]][self.init[1]] = 1 x = self.init[0]
y = self.init[1]
h = self.heuristic[x][y]
g = 0
f = g + h open = [[f, g, h, x, y]] found = False # flag that is set when search complete
resign = False # flag set if we can't find expand
count = 0 while not found and not resign:
# check if we still have elements on the open list
if len(open) == 0:
resign = True
print '###### Search terminated without success'
else:
# remove node from list
open.sort()
open.reverse()
next = open.pop()
x = next[3]
y = next[4]
g = next[1] # check if we are done
if x == goal[0] and y == goal[1]:
found = True
# print '###### A* search successful'
else:
# expand winning element and add to new open list
for i in range(len(delta)):
x2 = x + delta[i][0]
y2 = y + delta[i][1]
if x2 >= 0 and x2 < len(self.grid) and y2 >= 0 \
and y2 < len(self.grid[0]):
if closed[x2][y2] == 0 and self.grid[x2][y2] == 0:
g2 = g + self.cost
h2 = self.heuristic[x2][y2]
f2 = g2 + h2
open.append([f2, g2, h2, x2, y2])
closed[x2][y2] = 1
action[x2][y2] = i count += 1 # extract the path
invpath = []
x = self.goal[0]
y = self.goal[1]
invpath.append([x, y])
while x != self.init[0] or y != self.init[1]:
x2 = x - delta[action[x][y]][0]
y2 = y - delta[action[x][y]][1]
x = x2
y = y2
invpath.append([x, y]) self.path = []
for i in range(len(invpath)):
self.path.append(invpath[len(invpath) - 1 - i]) # -----------------------------------------------------
# this is the smoothing function
def smooth(self, weight_data = 0.1, weight_smooth = 0.1,
tolerance = 0.000001): if self.path == []:
raise ValueError, "Run A* first before smoothing path" self.spath = [[0 for row in range(len(self.path[0]))] \
for col in range(len(self.path))]
for i in range(len(self.path)):
for j in range(len(self.path[0])):
self.spath[i][j] = self.path[i][j] change = tolerance
while change >= tolerance:
change = 0.0
for i in range(1, len(self.path)-1):
for j in range(len(self.path[0])):
aux = self.spath[i][j] self.spath[i][j] += weight_data * \
(self.path[i][j] - self.spath[i][j]) self.spath[i][j] += weight_smooth * \
(self.spath[i-1][j] + self.spath[i+1][j]
- (2.0 * self.spath[i][j]))
if i >= 2:
self.spath[i][j] += 0.5 * weight_smooth * \
(2.0 * self.spath[i-1][j] - self.spath[i-2][j]
- self.spath[i][j])
if i <= len(self.path) - 3:
self.spath[i][j] += 0.5 * weight_smooth * \
(2.0 * self.spath[i+1][j] - self.spath[i+2][j]
- self.spath[i][j]) change += abs(aux - self.spath[i][j]) # ------------------------------------------------
#
# this is the robot class
class robot:
# init: creates robot and initializes location/orientation to 0, 0, 0
def __init__(self, length = 0.5):
self.x = 0.0
self.y = 0.0
self.orientation = 0.0
self.length = length
self.steering_noise = 0.0
self.distance_noise = 0.0
self.measurement_noise = 0.0
self.num_collisions = 0
self.num_steps = 0 # set: sets a robot coordinate
def set(self, new_x, new_y, new_orientation): self.x = float(new_x)
self.y = float(new_y)
self.orientation = float(new_orientation) % (2.0 * pi) # set_noise: sets the noise parameters
def set_noise(self, new_s_noise, new_d_noise, new_m_noise):
# makes it possible to change the noise parameters
# this is often useful in particle filters
self.steering_noise = float(new_s_noise)
self.distance_noise = float(new_d_noise)
self.measurement_noise = float(new_m_noise) # check: checks of the robot pose collides with an obstacle, or is too far outside the plane
def check_collision(self, grid):
for i in range(len(grid)):
for j in range(len(grid[0])):
if grid[i][j] == 1:
dist = sqrt((self.x - float(i)) ** 2 +
(self.y - float(j)) ** 2)
if dist < 0.5:
self.num_collisions += 1
return False
return True def check_goal(self, goal, threshold = 1.0):
dist = sqrt((float(goal[0]) - self.x) ** 2 + (float(goal[1]) - self.y) ** 2)
return dist < threshold # move: steering = front wheel steering angle, limited by max_steering_angle
# distance = total distance driven, most be non-negative
def move(self, grid, steering, distance,
tolerance = 0.001, max_steering_angle = pi / 4.0):
if steering > max_steering_angle:
steering = max_steering_angle
if steering < -max_steering_angle:
steering = -max_steering_angle
if distance < 0.0:
distance = 0.0 # make a new copy
res = robot()
res.length = self.length
res.steering_noise = self.steering_noise
res.distance_noise = self.distance_noise
res.measurement_noise = self.measurement_noise
res.num_collisions = self.num_collisions
res.num_steps = self.num_steps + 1 # apply noise
steering2 = random.gauss(steering, self.steering_noise)
distance2 = random.gauss(distance, self.distance_noise) # Execute motion
turn = tan(steering2) * distance2 / res.length if abs(turn) < tolerance:
# approximate by straight line motion
res.x = self.x + (distance2 * cos(self.orientation))
res.y = self.y + (distance2 * sin(self.orientation))
res.orientation = (self.orientation + turn) % (2.0 * pi)
else:
# approximate bicycle model for motion
radius = distance2 / turn
cx = self.x - (sin(self.orientation) * radius)
cy = self.y + (cos(self.orientation) * radius)
res.orientation = (self.orientation + turn) % (2.0 * pi)
res.x = cx + (sin(res.orientation) * radius)
res.y = cy - (cos(res.orientation) * radius) # check for collision
# res.check_collision(grid)
return res # sense:
def sense(self):
return [random.gauss(self.x, self.measurement_noise),
random.gauss(self.y, self.measurement_noise)] # measurement_prob: computes the probability of a measurement
def measurement_prob(self, measurement):
# compute errors
error_x = measurement[0] - self.x
error_y = measurement[1] - self.y # calculate Gaussian
error = exp(- (error_x ** 2) / (self.measurement_noise ** 2) / 2.0) \
/ sqrt(2.0 * pi * (self.measurement_noise ** 2))
error *= exp(- (error_y ** 2) / (self.measurement_noise ** 2) / 2.0) \
/ sqrt(2.0 * pi * (self.measurement_noise ** 2)) return error def __repr__(self):
# return '[x=%.5f y=%.5f orient=%.5f]' % (self.x, self.y, self.orientation)
return '[%.5f, %.5f]' % (self.x, self.y) # ----------------------------------------------------------------
#
# this is the particle filter class
class particles:
# init: creates particle set with given initial position
def __init__(self, x, y, theta,
steering_noise, distance_noise, measurement_noise, N = 100):
self.N = N
self.steering_noise = steering_noise
self.distance_noise = distance_noise
self.measurement_noise = measurement_noise self.data = []
for i in range(self.N):
r = robot()
r.set(x, y, theta)
r.set_noise(steering_noise, distance_noise, measurement_noise)
self.data.append(r) # extract position from a particle set
def get_position(self):
x = 0.0
y = 0.0
orientation = 0.0 for i in range(self.N):
x += self.data[i].x
y += self.data[i].y
# orientation is tricky because it is cyclic. By normalizing
# around the first particle we are somewhat more robust to
# the 0=2pi problem
orientation += (((self.data[i].orientation
- self.data[0].orientation + pi) % (2.0 * pi))
+ self.data[0].orientation - pi)
return [x / self.N, y / self.N, orientation / self.N] # motion of the particles
def move(self, grid, steer, speed):
newdata = [] for i in range(self.N):
r = self.data[i].move(grid, steer, speed)
newdata.append(r)
self.data = newdata # sensing and resampling
def sense(self, Z):
w = []
for i in range(self.N):
w.append(self.data[i].measurement_prob(Z)) # resampling (注意这是浅拷贝)
p3 = []
index = int(random.random() * self.N)
beta = 0.0
mw = max(w) for i in range(self.N):
beta += random.random() * 2.0 * mw
while beta > w[index]:
beta -= w[index]
index = (index + 1) % self.N
p3.append(self.data[index])
self.data = p3 # --------------------------------------------------
# run: runs control program for the robot
def run(grid, goal, spath, params, printflag = False, speed = 0.1, timeout = 1000): myrobot = robot()
myrobot.set(0., 0., 0.)
myrobot.set_noise(steering_noise, distance_noise, measurement_noise)
filter = particles(myrobot.x, myrobot.y, myrobot.orientation,
steering_noise, distance_noise, measurement_noise) cte = 0.0
err = 0.0
N = 0 index = 0 # index into the path while not myrobot.check_goal(goal) and N < timeout: diff_cte = - cte # compute the CTE # start with the present robot estimate
estimate = filter.get_position()
#--------------------------------------------------
# some basic vector calculations
dx = spath[index+1][0] spath[index][0]
dy = spath[index+1][1] spath[index][1]
drx = estimate[0] spath[index][0]
dry = estimate[1] spath[index][1]
# u is the robot estimate projected into the path segment
u = (drx * dx + dry * dy)/(dx * dx + dy * dy)
#the cte is the estimate projected onto the normal of the path segment
cte = (dry * dx drx * dy)/(dx * dx + dy * dy)
if u > 1:
index += 1 # ---------------------------------------- diff_cte += cte steer = - params[0] * cte - params[1] * diff_cte myrobot = myrobot.move(grid, steer, speed)
filter.move(grid, steer, speed) Z = myrobot.sense()
filter.sense(Z) if not myrobot.check_collision(grid):
print '##### Collision ####' err += (cte ** 2)
N += 1 if printflag:
print myrobot, cte, index, u return [myrobot.check_goal(goal), myrobot.num_collisions, myrobot.num_steps] # -------------------------------------------------------------------
#
# this is our main routine
def main(grid, init, goal, steering_noise, distance_noise, measurement_noise,
weight_data, weight_smooth, p_gain, d_gain): path = plan(grid, init, goal)
path.astar()
path.smooth(weight_data, weight_smooth)
return run(grid, goal, path.spath, [p_gain, d_gain]) # ------------------------------------------------
#
# input data and parameters
grid = [[0, 1, 0, 0, 0, 0],
[0, 1, 0, 1, 1, 0],
[0, 1, 0, 1, 0, 0],
[0, 0, 0, 1, 0, 1],
[0, 1, 0, 1, 0, 0]] init = [0, 0]
goal = [len(grid)-1, len(grid[0])-1] #以下这些参数可以调着玩,特别是p、d的权重,用优化函数可能得不到返回,自己尝试出好的值
steering_noise = 0.1
distance_noise = 0.03
measurement_noise = 0.3 weight_data = 0.1
weight_smooth = 0.2
p_gain = 2.0
d_gain = 6.0 print main(grid, init, goal, steering_noise, distance_noise, measurement_noise,
weight_data, weight_smooth, p_gain, d_gain) #----------------------------------------
# 参数优化
def twiddle(init_params):
n_params = len(init_params)
dparams = [1.0 for row in range(n_params)]
params = [0.0 for row in range(n_params)]
K = 10 for i in range(n_params):
params[i] = init_params[i] best_error = 0.0;
for k in range(K):
ret = main(grid, init, goal,
steering_noise, distance_noise, measurement_noise,
params[0], params[1], params[2], params[3])
if ret[0]:
best_error += ret[1] * 100 + ret[2]
else:
best_error += 99999
best_error = float(best_error) / float(k+1)
print best_error n = 0
while sum(dparams) > 0.0000001:
for i in range(len(params)):
params[i] += dparams[i]
err = 0
for k in range(K):
ret = main(grid, init, goal,
steering_noise, distance_noise, measurement_noise,
params[0], params[1], params[2], params[3], best_error)
if ret[0]:
err += ret[1] * 100 + ret[2]
else:
err += 99999
print float(err) / float(k+1)
if err < best_error:
best_error = float(err) / float(k+1)
dparams[i] *= 1.1
else:
params[i] -= 2.0 * dparams[i]
err = 0
for k in range(K):
ret = main(grid, init, goal,
steering_noise, distance_noise, measurement_noise,
params[0], params[1], params[2], params[3], best_error)
if ret[0]:
err += ret[1] * 100 + ret[2]
else:
err += 99999
print float(err) / float(k+1)
if err < best_error:
best_error = float(err) / float(k+1)
dparams[i] *= 1.1
else:
params[i] += dparams[i]
dparams[i] *= 0.5
n += 1
print 'Twiddle #', n, params, ' -> ', best_error
print ' '
return params #twiddle([weight_data, weight_smooth, p_gain, d_gain])
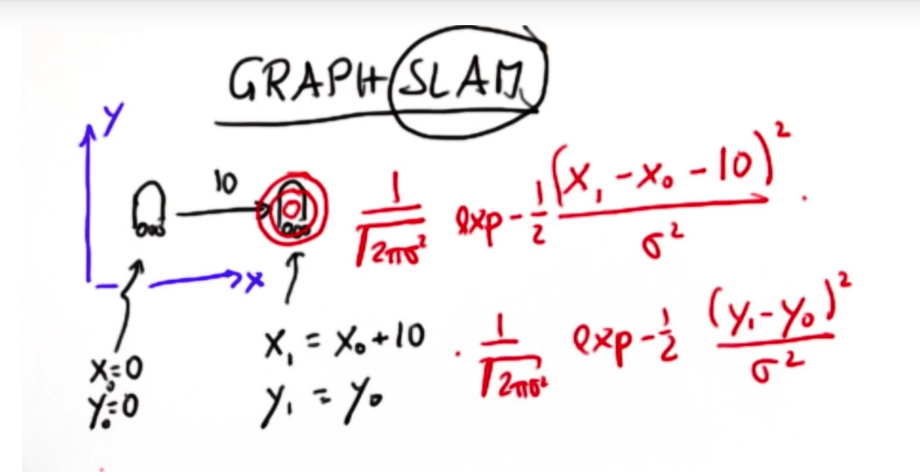
SLAM是一种建图方法,是同时定位和建图的总称。
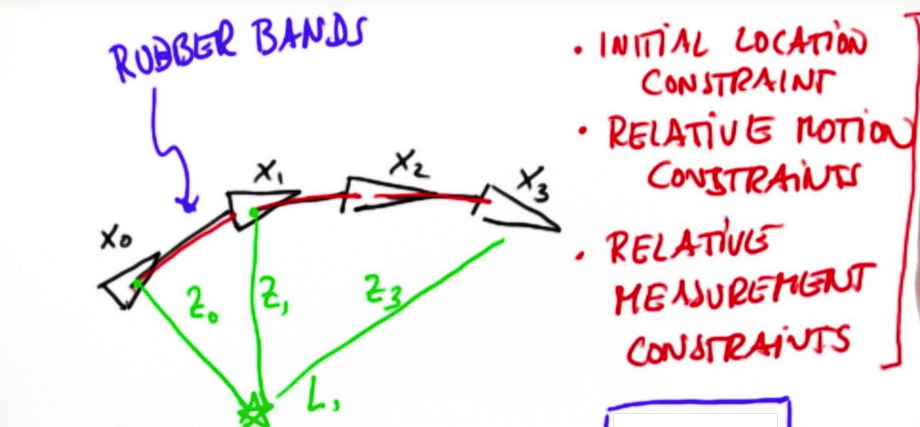
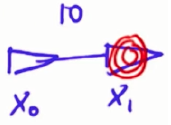
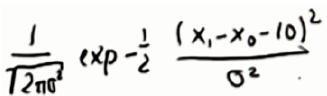
当移动机器人在环境中建图时,因为移动的不确定性迫使我们去定位。比如一个机器人从X0(0,0)沿x轴运动10个单位到X1,不能以X1=X0+10去表示移动后机器人的位置,而是用关于两个参数的高斯分布来表示,y方向同样。这两个高斯函数就成了约束条件,Graph SLAM就是利用一系列这样的约束来定义概率。(这是相对约束)
一个机器人的移动过程,每个点X1~X4都是(x,y,orientation)的三维向量,每个点时刻都会测量一次与地标的距离(测量结果z用高斯表示),这样会有三个约束出现:初始位置约束、相对约束(两点之间的相对位置)、相对地标位置约束。
完成Graph SLAM
为了完成Graph SLAM,一个矩阵和一个向量被引入,要把所有的姿势坐标和地标都填到这个二维矩阵里,
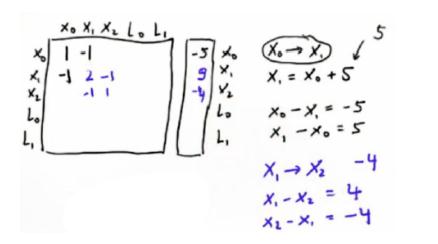
x0—>x1 5,那么x0+5=x1,x0+(-1*x1)=-5,就是第一行。然后反过来x1+(-1*x0)=5,就是第二行。
举一反三,倒回,x2—>x1 -4 ,x1-4=x2,x2+(-x1)=-4,这就是第三行。然后x1+(-x2)=4,加到第二行,最后结果如图,以此类推填充矩阵。
同理填入地标格子,没测地标的检测点空(x与L对应的空格),临近的两个检测点才测互相的空格。

Ω和§
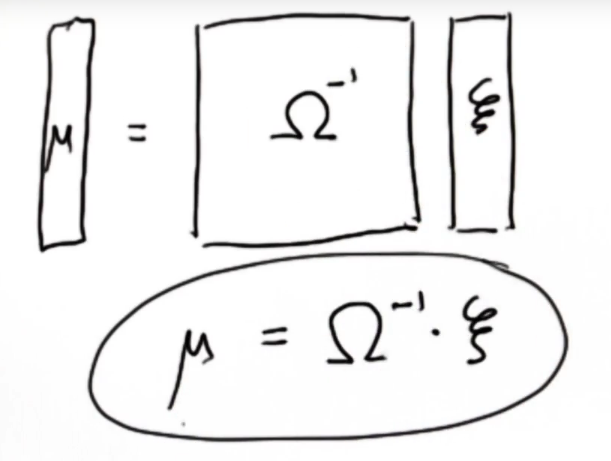
然后将这两个矩阵经过简单的数学运算就能找到所有世界坐标的最佳解,即最好估计值μ。
这就是SLAM Graph方法,只要每次看到约束的时候就把这些数字填到这两个矩阵当中,然后只需一个简单的运算,机器人的位置最佳坐标就出来了。
# -----------
# 写一个函数doit, 输入初始机器人的位置、move1、move2
# 这个函数能计算出Omega矩阵和Xi向量,并且返回mu向量 from math import *
import random # ------------------------------------------------
#
# 这是一个矩阵的类,它能让收集约束和计算结果更容易,
# 尽管效率低下 class matrix:
# 包含矩阵基本运算的类 # ------------
# 初始化 def __init__(self, value = [[]]):
self.value = value
self.dimx = len(value)
self.dimy = len(value[0])
if value == [[]]:
self.dimx = 0 # ------------
# 设置矩阵(向量?)尺寸并使每个元素为0 def zero(self, dimx, dimy = 0):
if dimy == 0:
dimy = dimx
# check if valid dimensions
if dimx < 1 or dimy < 1:
raise ValueError, "Invalid size of matrix"
else:
self.dimx = dimx
self.dimy = dimy
self.value = [[0.0 for row in range(dimy)] for col in range(dimx)] # ------------
# 设置等长宽的矩阵并全设1 def identity(self, dim):
# check if valid dimension
if dim < 1:
raise ValueError, "Invalid size of matrix"
else:
self.dimx = dim
self.dimy = dim
self.value = [[0.0 for row in range(dim)] for col in range(dim)]
for i in range(dim):
self.value[i][i] = 1.0 # ------------
# 输出矩阵值 def show(self, txt = ''):
for i in range(len(self.value)):
print txt + '['+ ', '.join('%.3f'%x for x in self.value[i]) + ']'
print ' ' # ------------
# 同规模的两矩阵相加 def __add__(self, other):
# check if correct dimensions
if self.dimx != other.dimx or self.dimx != other.dimx:
raise ValueError, "Matrices must be of equal dimension to add"
else:
# add if correct dimensions
res = matrix()
res.zero(self.dimx, self.dimy)
for i in range(self.dimx):
for j in range(self.dimy):
res.value[i][j] = self.value[i][j] + other.value[i][j]
return res # ------------
# 同规模矩阵相减 def __sub__(self, other):
# check if correct dimensions
if self.dimx != other.dimx or self.dimx != other.dimx:
raise ValueError, "Matrices must be of equal dimension to subtract"
else:
# subtract if correct dimensions
res = matrix()
res.zero(self.dimx, self.dimy)
for i in range(self.dimx):
for j in range(self.dimy):
res.value[i][j] = self.value[i][j] - other.value[i][j]
return res # ------------
# 等规模矩阵相乘 def __mul__(self, other):
# check if correct dimensions
if self.dimy != other.dimx:
raise ValueError, "Matrices must be m*n and n*p to multiply"
else:
# multiply if correct dimensions
res = matrix()
res.zero(self.dimx, other.dimy)
for i in range(self.dimx):
for j in range(other.dimy):
for k in range(self.dimy):
res.value[i][j] += self.value[i][k] * other.value[k][j]
return res # ------------
# 矩阵转置 def transpose(self):
# compute transpose
res = matrix()
res.zero(self.dimy, self.dimx)
for i in range(self.dimx):
for j in range(self.dimy):
res.value[j][i] = self.value[i][j]
return res # ------------
# 从现有的矩阵元素中提取一个新的矩阵
# 例如 ([0, 2], [0, 2, 3])即提取第0行和第3行的第0、2、3个元素 def take(self, list1, list2 = []):
if list2 == []:
list2 = list1
if len(list1) > self.dimx or len(list2) > self.dimy:
raise ValueError, "list invalid in take()" res = matrix()
res.zero(len(list1), len(list2))
for i in range(len(list1)):
for j in range(len(list2)):
res.value[i][j] = self.value[list1[i]][list2[j]]
return res # ------------
# 从现有的矩阵元素中提取扩张一个新的矩阵
# 例如 (3, 5, [0, 2], [0, 2, 3]),结果是3行5列,结果中第1/3行
# 的1、3、4列是初始矩阵按顺序分布,其余0补充
def expand(self, dimx, dimy, list1, list2 = []):
if list2 == []:
list2 = list1
if len(list1) > self.dimx or len(list2) > self.dimy:
raise ValueError, "list invalid in expand()" res = matrix()
res.zero(dimx, dimy)
for i in range(len(list1)):
for j in range(len(list2)):
res.value[list1[i]][list2[j]] = self.value[i][j]
return res # ------------
# 计算正定矩阵的上三角Cholesky分解
def Cholesky(self, ztol= 1.0e-5):
res = matrix()
res.zero(self.dimx, self.dimx) for i in range(self.dimx):
S = sum([(res.value[k][i])**2 for k in range(i)])
d = self.value[i][i] - S
if abs(d) < ztol:
res.value[i][i] = 0.0
else:
if d < 0.0:
raise ValueError, "Matrix not positive-definite"
res.value[i][i] = sqrt(d)
for j in range(i+1, self.dimx):
S = sum([res.value[k][i] * res.value[k][j] for k in range(i)])
if abs(S) < ztol:
S = 0.0
res.value[i][j] = (self.value[i][j] - S)/res.value[i][i]
return res # ------------
# 计算矩阵的Cholesky上三角分解矩阵的逆矩阵 def CholeskyInverse(self):
res = matrix()
res.zero(self.dimx, self.dimx) # Backward step for inverse.
for j in reversed(range(self.dimx)):
tjj = self.value[j][j]
S = sum([self.value[j][k]*res.value[j][k] for k in range(j+1, self.dimx)])
res.value[j][j] = 1.0/ tjj**2 - S/ tjj
for i in reversed(range(j)):
res.value[j][i] = res.value[i][j] = \
-sum([self.value[i][k]*res.value[k][j] for k in \
range(i+1,self.dimx)])/self.value[i][i]
return res # ------------
# 计算返回矩形矩阵的逆置 def inverse(self):
aux = self.Cholesky()
res = aux.CholeskyInverse()
return res #--------------
#打印矩阵 def __repr__(self):
return repr(self.value) # ################################
"""下面这个粒子调用(-3,5,3),-3初始位置,5 move1,3 move2
应返回向量结果[[-3.0],
[2.0],
[5.0]]
"""
def doit(initial_pos, move1, move2):
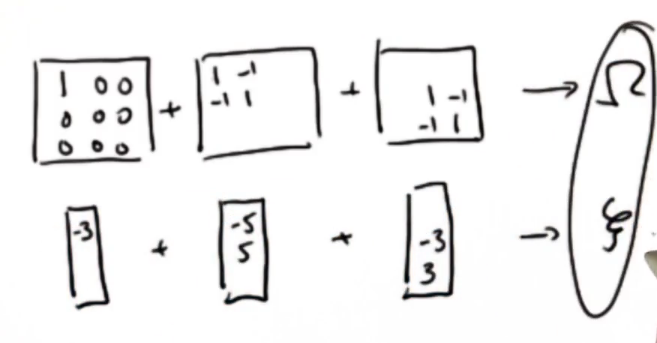
Omega = [[1,0,0],[0,0,0],[0,0,0]] #x0=-3
Xi = [[initial_pos],[0],[0]] Omega += [[1,-1,0],[-1,1,0],[0,0,0]] #x0+5=x1
Xi += [[-move1],[move1],[0]] Omega += [[0,0,0],[0,1,-1],[0,-1,1]] #x1+3=x2
Xi += [[0],[-move2],[move2]]
230 Omega.show('Omegs: ')
231 Xi.show('Xi: ')
mu = Omega.inverse()*Xi
mu.show('mu: ')
234
return mu doit(-3, 5, 3)
加入一个地标,从3*3变成4*4,代码添加
Omega = Omega.expand(4, 4, [0,1,2], [0,1,2])
Xi = Xi.expand(4, 1, [0, 1, 2], [0]) Omega += matrix([[1., 0., 0., -1.],[0., 0., 0., 0.],[0., 0., 0.,0.],[ -1., 0., 0., 1.]])
Xi += matrix([[-Z0], [0.], [0.], [Z0]]) Omega += matrix([[0., 0., 0., 0.],[0., 1., 0., -1.],[0., 0., 0.,0.],[0.,-1., 0., 1.]])
Xi += matrix([[0.], [-Z1], [0.], [Z1]]) Omega += matrix([[0., 0., 0., 0.],[0., 0., 0., 0.],[0., 0., 1.,-1.],[0.,0., -1., 1.]])
Xi += matrix([[0.], [0.], [-Z2], [Z2]])
引入噪音
噪音使得测量地标距离不精准, 假设有两个机器人位置,第二个在第一个右边10,并伴有高斯噪音,情况和高斯噪音如下:
假设最后一个点测量的地标距离是1(本来是2),总概率是两者的乘积,最后结果类似 x1/σ+x0/σ=10/σ ,1/σ代表信度,要想这个乘积更大,几个技巧:1.去掉常数;2.如果能把乘积编程加法,去掉指数3.甚至可以去掉-1/2
修改代码,使得最后的测量具有非常高的置信度,系数为5.您应该得到[3,2.179,5.714,6.821]作为答案。 从这个结果中可以看出,最后一点与地标的差异非常接近1.0的测量差异,因为与其他测量和运动相比,这个置信度相对较高。
Omega += matrix([[0., 0., 0., 0.],[0., 0., 0., 0.],[0., 0.,5., -5.],[0., 0., -5., 5.]])
Xi += matrix([[0.], [0.], [-Z2*5], [Z2*5]])
完成SLAM编程
每一时刻都有一组约束(初始位置,移动或者地标测量),把他们装入矩阵Omega和向量Xi,两个thing相乘,结果就是路径和地图,强度因数1/σ表示信度。
下面是将SLAM适用于广义环境设置的参数和调用输出结果:
num_landmarks = 5 # 地标数量
N = 20 # time steps
world_size = 100.0 # 世界的尺寸
measurement_range = 50.0 # 能检测到地标的检测范围
motion_noise = 2.0
measurement_noise = 2.0
distance = 20.0 # 机器人打算移动的距离
data = make_data(N,num_landmarks,world_size,measurement_range,motion_noise,measurement_noise,distance)
result = slam(data,N,num_landmarks,motion_noise,measurement_noise)
print_result(N,num_landmarks,result)
make_data(),装入环境参数,返回一个运动序列和一个测量序列,即将写的函数slam()装入这两个数据序列和以上这些参数设置,返回一个机器人路径表和估计的地标位置。
初始位置设置在[50,50],这个世界的中心。
取所有的输入参数,并设置矩阵Ω和矢量Xi的维数。 维度是路径的长度加上地标数量的两倍,因为在相同的数据结构中为每一个空格都建立了x与y。然后,为Ω创建一个矩阵,为Xi创建一个向量,给它适当的尺寸,然后引入一个约束条件,即初始位置必须是world_size / 2.0,强度值为1.0。这对最终解决方案没有影响,因为这是唯一的绝对约束。 但是你可以看到矩阵的主对角线是1,x是1,y是1,Xi向量一样。
dim = 2* (N + num_landmarks)
Omega = matrix()
Omega.zero(dim,dim)
Omega.value[0][0] = 1.0
Omega.value[1][1] = 1.0
Xi = matrix()
Xi.zero(dim, 1)
Xi.value[0][0] = world_size / 2
Xi.value[1][0] = world_size / 2
S标识位置,L标识坐标,每个格子有x和y组成。以下编写SLAM代码。
from math import *
import random #这里引入矩阵操作的类和机器人的类
def make_data(N, num_landmarks, world_size, measurement_range, motion_noise, measurement_noise, distance)
complete = False while not complete: data = [] # make robot and landmarks
r = robot(world_size, measurement_range, motion_noise, measurement_noise)
r.make_landmarks(num_landmarks)
seen = [False for row in range(num_landmarks)]
# guess an initial motion
orientation = random.random() * 2.0 * pi
dx = cos(orientation) * distance
dy = sin(orientation) * distance
for k in range(N-1):
# sense
Z = r.sense() # check off all landmarks that were observed
for i in range(len(Z)):
seen[Z[i][0]] = True
# move
while not r.move(dx, dy):
# if we'd be leaving the robot world, pick instead a new direction
orientation = random.random() * 2.0 * pi
dx = cos(orientation) * distance
dy = sin(orientation) * distance # memorize data
data.append([Z, [dx, dy]]) # we are done when all landmarks were observed; otherwise re-run
complete = (sum(seen) == num_landmarks) print ' '
print 'Landmarks: ', r.landmarks
print r return data
def print_result(N, num_landmarks, result):
print 'Estimated Pose(s):'
for i in range(N):
print ' ['+ ', '.join('%.3f'%x for x in result.value[2*i]) + ', ' \
+ ', '.join('%.3f'%x for x in result.value[2*i+1]) +']'
print 'Estimated Landmarks:'
for i in range(num_landmarks):
print ' ['+ ', '.join('%.3f'%x for x in result.value[2*(N+i)]) + ', ' \
+ ', '.join('%.3f'%x for x in result.value[2*(N+i)+1]) +']' def slam(data, N, num_landmarks, motion_noise, measurement_noise):
#set the dimension of the filter
dim = 2 * (N + num_landmarks)
#make the constraint information matrix and vector
Omega = matrix()
Omega.zero(dim,dim)
Omega.value[0][0] = 1.0
Omega.value[1][1] = 1.0
Xi = matrix()
Xi.zero(dim, 1)
Xi.value[0][0] = world_size / 2
Xi.value[1][0] = world_size / 2 for k in range(len(data)):
#n is the index of the robots pose in the matrix/vector
n = k * 2
measurement = data[k][0]
motion = data[k][1]
# integrate measurements
for i in range(len(measurement)):
#m is the index of the landmark coordinate in the
#matrix/vector
m = 2 * (N + measurement[i][0]) # update the information matrix according to measurement
for b in range(2):
Omega.value[n+b][n+b] += 1.0 / measurement_noise
Omega.value[m+b][m+b] += 1.0 / measurement_noise
Omega.value[n+b][m+b] += 1.0 / measurement_noise
Omega.value[m+b][n+b] += 1.0 / measurement_noise
Xi.value[ n + b ][ 0 ] += measurement[i][1+b] / measurement_noise
Xi.value[m+b][0] += measurement[i][1+b] / measurement_noise # update the information matrix according to motion
for b in range(4):
Omega.value[n+b][n+b] += 1.0 / motion_noise
for b in range(2):
Omega.value[n+b][n+b+2] += 1.0 / motion_noise
Omega.value[n+b+2][n+b ] += 1.0 / motion_noise
Xi.value[n+b][0] += motion[b] / motion_noise
Xi.value[n+b+2][0] += motion[b] / motion_noise mu = Omega.inverse() * Xi
return mu #这里调用这节的第一个编程(参数设置及调用输出)
输入起始位置和所有地标测量位置,得出每次机器人的估计坐标位置(即路径)和所有地标的位置估计
两个月零八天,蒙特卡洛定位——>卡尔曼追踪定位——>粒子滤波定位——>路径规划——>PID控制——>SLAM
How far is self car~
SLAM的更多相关文章
- Slam(即时定位与地图构建) 知识篇
Slam即时定位与地图构建 技术解释 同步定位与地图构建(SLAM或Simultaneous localization and mapping)是一种概念:希望机器人从未知环境的未知地点出发,在运动过 ...
- rplidar & hector slam without odometry
接上一篇:1.rplidar测试 方式一:测试使用rplidar A2跑一下手持的hector slam,参考文章:用hector mapping构建地图 但是roslaunch exbotxi_br ...
- Google开源SLAM软件cartographer中使用的UKF滤波器解析
在Google开源SLAM软件cartographer中,相对<SLAM for dummies>使用了更为复杂.性能更好的Scan匹配与UKF算法,这里简单介绍下cartographer ...
- SLAM初探-SLAM for Dummies
SLAM综述性特别是原理讲述比较浅显易懂的的资料比较少,相对比较知名的是<SLAM for Dummies>,但中文资料相对较少,这里就简单概述一下<SLAM for Dummies ...
- SLAM前端技术选择思考
以前是专门做室内定位技术研究的,先后学习和分析了多种基于电磁的室内定位技术,如WiFi指纹定位(先后出现过RSSI.CTF.CIR多种指纹特征).WiFi ToF定位.低功耗蓝牙BLE以及iBeaco ...
- 【Hector slam】A Flexible and Scalable SLAM System with Full 3D Motion Estimation
作者总结了SLAM前端和后端的区别 While SLAM frontends are used to estimate robot movement online in real-time, the ...
- (2)RGB-D SLAM系列- 工具篇(依赖库及编译)
做了个SLAM的小视频,有兴趣的朋友可以看下 https://youtu.be/z5wDzMZF10Q 1)Library depended 一个完整的SLAM系统包括,数据流获取,数据读取,特征提取 ...
- (1)RGB-D SLAM系列- 工具篇(硬件+关键技术)
/*************************************************************************************************** ...
- 学习高博SLAM(1)
这几天按照高博的博客做了一起做RGB-D SLAM (1)和(2) ,,其中大部分步骤都没问题 开发环境是ubuntu14.04+indigo 有几个问题就是: (1)我的电脑不能加载PPA,原因是: ...
- 一颗躁动的心---下决心从SLAM开始,不钻研嵌入式底层了
在写这个随笔时,北京的外面正在下2016的第一场雪.夜深人尽之时总会考虑一下自己的未来在何方. 长这么大了,我发现我这人始终不能坚定不移的朝着一个方向努力,总是朝三暮四,对学习更是朝令夕改,这造成了我 ...
随机推荐
- Django框架的探索
django框架的路由 django2 路由支持正则匹配,如: re_path(r'^category/(?P<category_id>\d+)/$',CourseCategoryView ...
- HATEOAS
HATEOAS(Hypermedia as the engine of application state)是 REST 架构风格中最复杂的约束,也是构建成熟 REST 服务的核心.它的重要性在于打破 ...
- 一个简单的struts2上传图片的例子
https://www.cnblogs.com/yeqrblog/p/4398914.html 在我的大创项目中有对应的应用
- linux shell数据重定向(输入重定向与输出重定向)详细分析
linux shell下常用输入输出操作符是: 1. 标准输入 (stdin) :代码为 0 ,使用 < 或 << : /dev/stdin -> /proc/self/fd/ ...
- vue mock
如果后端不肯来帮你 mock 数据的话,前端自己来 mock 也是很简单的.你可以使用mock server 或者使用 mockjs + rap 也是很方便的. 不久前出的 easy-mock也相当的 ...
- iis网站部署常见错误
sqlserver 授权登录名没有db_owner权限 数据库连接字符串端口没开,连接形式:192.168.0.1,1433
- redis-dump安装与导出redis数据
一.安装redis-dump redis-dump安装的时候一般都会遇到下面的错误: ERROR: Error installing redis-dump:redis requires Ruby ve ...
- js 加减乘除以及四舍五入 新写法
1 四舍五入 eg: (1.23).round() = 1.2 (1.2456).round(3) = 1.246 Number.prototype.round = function (count) ...
- 【深度好文】多线程之WaitHandle-->派生EventWaitHandle事件构造-》AutoResetEvent、ManualResetEvent
AutoResetEvent/ManualResetEvent 都是继承自 EventWaitHandle ,EventWaitHandle继承自WaitHandle. 在讨论这个问题之前,我们先了解 ...
- Integer 比较忽略的问题
Integer i1 = 100; Integer i2 = 100; i1==i2Integer i3 = 199; Integer i4 = 200; i3+1 == i4int i5 = 200 ...