Layers Of Caffe
本文试图描述构建一个网络结构的layers,可以用prototxt脚本直接写,也可以用python接口实现。
最简单的神经网络包含但不限于以下四部分:
数据层(Data): Data、ImageData
激活层(Activation): sigmoid、tanh、relu
视觉层(vision) :Convolution、Pooling、 Local Response Normalization (LRN)、 im2col
输出层(output): softmax_loss、Inner Product、accuracy、reshape、dropout
A、数据层(Data)
数据层是每个模型的最底层,是模型的入口,不仅提供数据的输入,也提供数据从Blobs转换成别的格式进行保存输出。通常数据的预处理(如减去均值, 放大缩小, 裁剪和镜像等),也在这一层设置参数实现。
数据来源来自:
高效率:高效的数据库(如LevelDB和LMDB)、内存;
低效率:磁盘的hdf5文件、图片格式文件。
所有的数据层的都具有的公用参数:
layer {
name: "cifar"
type: "Data"
top: "data"
top: "label"
include {
phase: TRAIN
}
transform_param {
mean_file: "examples/cifar10/mean.binaryproto"
scale: 0.00390625
# 用一个配置文件来进行均值操作
mirror: 1 # 1表示开启镜像,0表示关闭,也可用ture和false来表示
# 剪裁一个 227*227的图块,在训练阶段随机剪裁,在测试阶段从中间裁剪 如果超过这个数据就会裁剪
crop_size: 227
shuffle: true #随机打乱数据
}
data_param {
source: "examples/cifar10/cifar10_train_lmdb"
batch_size: 100
backend: LMDB
}
}
name: 表示该层的名称,可随意取
type: 层类型,如果是Data,表示数据来源于LevelDB或LMDB。根据数据的来源不同,数据层的类型也不同(后面会详细阐述)。一般在练习的时候,我们都是采 用的LevelDB或LMDB数据,因此层类型设置为Data。
top或bottom: 每一层用bottom来输入数据,用top来输出数据。如果只有top没有bottom,则此层只有输出,没有输入。反之亦然。如果有多个 top或多个bottom,表示有多个blobs数据的输入和输出。
data 与 label: 在数据层中,至少有一个命名为data的top。如果有第二个top,一般命名为label。 这种(data,label)配对是分类模型所必需的。
include: 一般训练的时候和测试的时候,模型的层是不一样的。该层(layer)是属于训练阶段的层,还是属于测试阶段的层,需要用include来指定。如果没有include参数,则表示该层既在训练模型中,又在测试模型中。
Transformations: 数据的预处理,可以将数据变换到定义的范围内。如设置scale为0.00390625,实际上就是1/255, 即将输入数据由0-255归一化到0-1之间
1、数据来自于数据库(如LevelDB和LMDB)
LMDB数据制作:图像数据转换成db(leveldb/lmdb)文件
计算均值文件(非必须)计算图片数据的均值
层类型(layer type):Data
必须设置的参数:
source: 包含数据库的目录名称,如examples/mnist/mnist_train_lmdb
batch_size: 每次处理的数据个数,如64
可选的参数:
rand_skip: 在开始的时候,路过某个数据的输入。通常对异步的SGD很有用。
backend: 选择是采用LevelDB还是LMDB, 默认是LevelDB.
layer {
name: "mnist"
type: "Data"
top: "data"
top: "label"
include {
phase: TRAIN
}
transform_param {
scale: 0.00390625
}
data_param {
source: "examples/mnist/mnist_train_lmdb"
batch_size: 64
backend: LMDB
}
}
2、数据来自于图片image
层类型:ImageData
必须设置的参数:
source: 一个文本文件的名字,每一行给定一个图片文件的名称和标签(label)
/iamges/aaa.jpg 0
/images/bbb.jpg 1
batch_size: 每一次处理的数据个数,即图片数
可选参数:
rand_skip: 在开始的时候,路过某个数据的输入。通常对异步的SGD很有用。
shuffle: 随机打乱顺序,默认值为false
new_height,new_width: 如果设置,则将图片进行resize
layer {
name: "data"
type: "ImageData"
top: "data"
top: "label"
transform_param {
mirror: false
crop_size: 227
mean_file: "data/ilsvrc12/imagenet_mean.binaryproto"
}
image_data_param {
source: "examples/_temp/file_list.txt"
batch_size: 50
new_height: 256
new_width: 256
}
}
B、激活层(Activation)
在激活层中,对输入数据进行激活操作(实际上就是一种函数变换),是逐元素进行运算的。从bottom得到一个blob数据输入,运算后,从top输入一个blob数据。在运算过程中,没有改变数据的大小,即输入和输出的数据大小是相等的。
输入:n*c*h*w
输出:n*c*h*w
常用的激活函数有sigmoid, tanh,relu等,下面分别介绍。
1、Sigmoid
对每个输入数据,利用sigmoid函数执行操作。这种层设置比较简单,没有额外的参数。

层类型:Sigmoid
示例:
layer {
name: "encode1neuron"
bottom: "encode1"
top: "encode1neuron"
type: "Sigmoid"
}
python代码:
2、ReLU / Rectified-Linear and Leaky-ReLU
ReLU是目前使用最多的激活函数,主要因为其收敛更快,并且能保持同样效果。
标准的ReLU函数为max(x, 0),当x>0时,输出x; 当x<=0时,输出0
f(x)=max(x,0)
层类型:ReLU
可选参数:
negative_slope:默认为0. 对标准的ReLU函数进行变化,如果设置了这个值,那么数据为负数时,就不再设置为0,而是用原始数据乘以negative_slope
layer {
name: "relu1"
type: "ReLU"
bottom: "pool1"
top: "pool1"
}
RELU层支持in-place计算,这意味着bottom的输出和输入相同以避免内存的消耗。
python代码实现
relu = Layers.ReLU(inputs, in_place=True)
3、TanH / Hyperbolic Tangent
利用双曲正切函数对数据进行变换。

层类型:TanH
layer {
name: "layer"
bottom: "in"
top: "out"
type: "TanH"
}
4、Absolute Value
求每个输入数据的绝对值。
f(x)=Abs(x)
层类型:AbsVal
layer {
name: "layer"
bottom: "in"
top: "out"
type: "AbsVal"
}
5、Power
对每个输入数据进行幂运算
f(x)= (shift + scale * x) ^ power
层类型:Power
可选参数:
power: 默认为1
scale: 默认为1
shift: 默认为0
layer {
name: "layer"
bottom: "in"
top: "out"
type: "Power"
power_param {
power: 2
scale: 1
shift: 0
}
}
6、BNLL
binomial normal log likelihood的简称
f(x)=log(1 + exp(x))
层类型:BNLL
layer {
name: "layer"
bottom: "in"
top: "out"
type: “BNLL”
}
C、视觉层(vision)
视觉层(Vision Layers)的参数,视觉层包括Convolution, Pooling, Local Response Normalization (LRN), im2col等层。
前一节中Data层用python代码实现:
data, label = L.Data(source=lmbd_file, backend=P.Data.LMDB, batch_size=batch_size_num,ntop=2,transform_parm=dict(crop_size=40,mean_file=mean_file,mirror=True))
这块预留ImageData的python实现代码:
1、Convolution层:
就是卷积层,是卷积神经网络(CNN)的核心层。
层类型:Convolution
lr_mult: 学习率的系数,最终的学习率是这个数乘以solver.prototxt配置文件中的base_lr。如果有两个lr_mult, 则第一个表示权值的学习率,第二个表示偏置项的学习率。一般偏置项的学习率是权值学习率的两倍。
在后面的convolution_param中,我们可以设定卷积层的特有参数。
必须设置的参数:
num_output: 卷积核(filter)的个数
kernel_size: 卷积核的大小。如果卷积核的长和宽不等,需要用kernel_h和kernel_w分别设定
其它参数:
stride: 卷积核的步长,默认为1。也可以用stride_h和stride_w来设置。
pad: 扩充边缘,默认为0,不扩充。 扩充的时候是左右、上下对称的,比如卷积核的大小为5*5,那么pad设置为2,则四个边缘都扩充2个像素,即宽度和高度都扩充了4个像素,这样卷积运算之后的特征图就不会变小。也可以通过pad_h和pad_w来分别设定。
layer {
name: "conv1"
type: "Convolution"
bottom: "data"
top: "conv1"
param {
lr_mult: 1
}
param {
lr_mult: 2
}
convolution_param {
num_output: 20
kernel_size: 5
stride: 1
weight_filler {
type: "xavier" #或者使用高斯进行初始化
}
bias_filler {
type: "constant" #0
}
}
}
用python代码实现:
conv1 = Layer.Convolution(data,kernel_size=5, stride=1, num_output=16,pad=2,weight_filler=dict(type='xavier'))
参数:
data为数据层传递的数据
2、Pooling层
layer {
name: "pool1"
type: "Pooling"
bottom: "conv1"
top: "pool1"
pooling_param {
pool: MAX
kernel_size: 3
stride: 2
}
}
pooling层的运算方法基本是和卷积层是一样的。
pool1 = Layer.Pooling(inputs,pool=Pooling.Max,kernel_size=3,stride=2)
 ,得到归一化后的输出
,得到归一化后的输出layers {
name: "norm1"
type: LRN
bottom: "pool1"
top: "norm1"
lrn_param {
local_size: 5
alpha: 0.0001
beta: 0.75
}
}
python代码实现:
待续。。
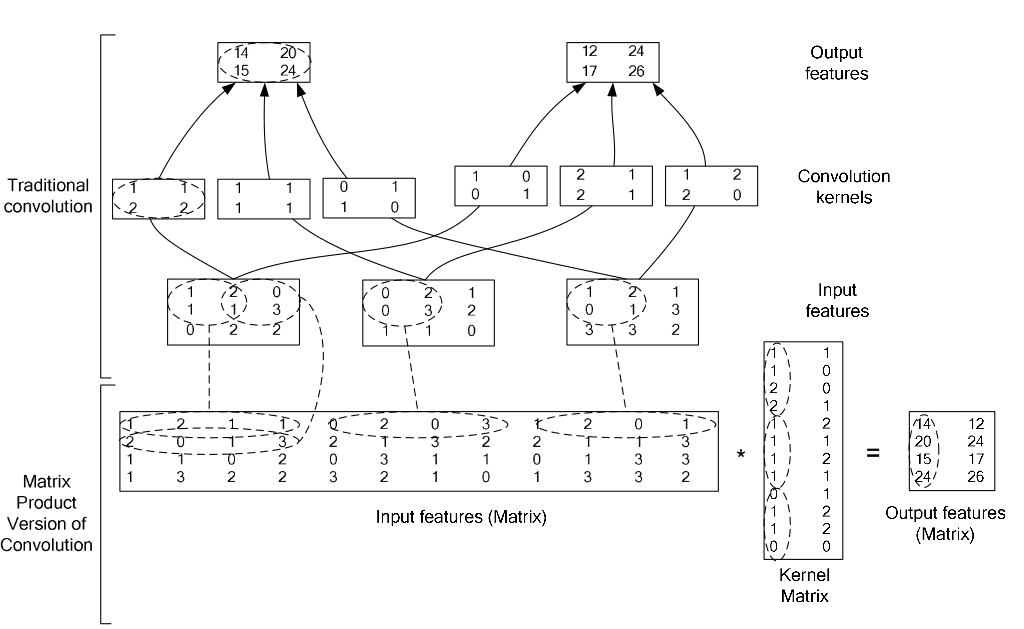
4、im2col层
如果对matlab比较熟悉的话,就应该知道im2col是什么意思。它先将一个大矩阵,重叠地划分为多个子矩阵,对每个子矩阵序列化成向量,最后得到另外一个矩阵。
看一看图就知道了:
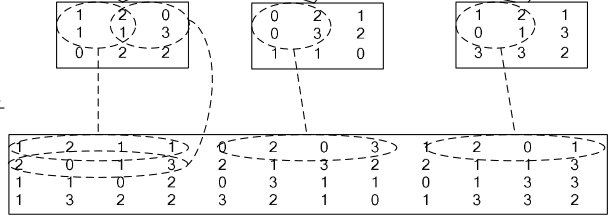
在caffe中,卷积运算就是先对数据进行im2col操作,再进行内积运算(inner product)。这样做,比原始的卷积操作速度更快。
看看两种卷积操作的异同:
D、输出层(output)
包括:softmax_loss层,Inner Product层,accuracy层,reshape层和dropout层及其它们的参数配置。
1、softmax-loss
softmax-loss层和softmax层计算大致是相同的。softmax是一个分类器,计算的是类别的概率(Likelihood),是Logistic Regression 的一种推广。Logistic Regression 只能用于二分类,而softmax可以用于多分类。
softmax与softmax-loss的区别:
softmax计算公式:
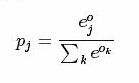
而softmax-loss计算公式:
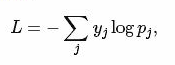
关于两者的区别更加具体的介绍,可参考:softmax vs. softmax-loss
用户可能最终目的就是得到各个类别的概率似然值,这个时候就只需要一个 Softmax层,而不一定要进行softmax-Loss 操作;或者是用户有通过其他什么方式已经得到了某种概率似然值,然后要做最大似然估计,此时则只需要后面的 softmax-Loss 而不需要前面的 Softmax 操作。因此提供两个不同的 Layer 结构比只提供一个合在一起的 Softmax-Loss Layer 要灵活许多。
不管是softmax layer还是softmax-loss layer,都是没有参数的,只是层类型不同而已
softmax-loss layer:输出loss值
layer {
name: "loss"
type: "SoftmaxWithLoss"
bottom: "ip1"
bottom: "label"
top: "loss"
}
softmax layer: 输出似然值
layers {
bottom: "cls3_fc"
top: "prob"
name: "prob"
type: “Softmax"
}
python代码:
loss = Layers.SoftmaxWithLoss(fc,label) #label是数据层的label
2、Inner Product
全连接层,把输入当作成一个向量,输出也是一个简单向量(把输入数据blobs的width和height全变为1)。
输入: n*c0*h*w
输出: n*c1*1*1
全连接层实际上也是一种卷积层,只是它的卷积核大小和原数据大小一致。因此它的参数基本和卷积层的参数一样。
层类型:InnerProduct
lr_mult: 学习率的系数,最终的学习率是这个数乘以solver.prototxt配置文件中的base_lr。如果有两个lr_mult, 则第一个表示权值的学习率,第二个表示偏置项的学习率。一般偏置项的学习率是权值学习率的两倍。
必须设置的参数:
num_output: 过滤器(filfter)的个数
其它参数:
layer {
name: "ip1"
type: "InnerProduct"
bottom: "pool2"
top: "ip1"
param {
lr_mult: 1
}
param {
lr_mult: 2
}
inner_product_param {
num_output: 500
weight_filler {
type: "xavier"
}
bias_filler {
type: "constant"
}
}
}
python实现代码:
fc = Layers.InnerProduct(pool2, num_output=1024,weight_filler=dict(type='xavier'))
3、accuracy
输出分类(预测)精确度,只有test阶段才有,因此需要加入include参数。
层类型:Accuracy
layer {
name: "accuracy"
type: "Accuracy"
bottom: "ip2"
bottom: "label"
top: "accuracy"
include {
phase: TEST
}
}
python代码实现:
accurary = Layers.Accurary(inputs,label)
4、reshape
在不改变数据的情况下,改变输入的维度。
层类型:Reshape
先来看例子
layer {
name: "reshape"
type: "Reshape"
bottom: "input"
top: "output"
reshape_param {
shape {
dim: 0 # copy the dimension from below
dim: 2
dim: 3
dim: -1 # infer it from the other dimensions
}
}
}
有一个可选的参数组shape, 用于指定blob数据的各维的值(blob是一个四维的数据:n*c*w*h)。
dim:0 表示维度不变,即输入和输出是相同的维度。
dim:2 或 dim:3 将原来的维度变成2或3
dim:-1 表示由系统自动计算维度。数据的总量不变,系统会根据blob数据的其它三维来自动计算当前维的维度值 。
假设原数据为:64*3*28*28, 表示64张3通道的28*28的彩色图片
经过reshape变换:
reshape_param {
shape {
dim: 0
dim: 0
dim: 14
dim: -1
}
}
输出数据为:64*3*14*56
5、Dropout
Dropout是一个防止过拟合的trick。可以随机让网络某些隐含层节点的权重不工作。
先看例子:
layer {
name: "drop7"
type: "Dropout"
bottom: "fc7-conv"
top: "fc7-conv"
dropout_param {
dropout_ratio: 0.5
}
}
只需要设置一个dropout_ratio就可以了。
还有其它更多的层,但用的地方不多,就不一一介绍了。
随着深度学习的深入,各种各样的新模型会不断的出现,因此对应的各种新类型的层也在不断的出现。
原文链接:https://www.cnblogs.com/denny402/tag/caffe/
Layers Of Caffe的更多相关文章
- 深度学习框架Caffe —— Deep learning in Practice
因工作交接需要, 要将caffe使用方法及整体结构描述清楚. 鉴于也有同学问过我相关内容, 决定在本文中写个简单的tutorial, 方便大家参考. 本文简单的讲几个事情: Caffe能做什么? 为什 ...
- Caffe : Layer Catalogue(2)
TanH / Hyperbolic Tangent 类型(type):TanH CPU 实现: ./src/caffe/layers/tanh_layer.cpp CUDA.GPU实现: ./src/ ...
- Caffe —— Deep learning in Practice
因工作交接须要. 要将caffe用法及总体结构描写叙述清楚. 鉴于也有同学问过我相关内容, 决定在本文中写个简单的tutorial, 方便大家參考. 本文简单的讲几个事情: Caffe能做什么? 为什 ...
- Caffe框架详细梳理
protobuf是google公司开发的,并在Google内部久经考验的一个东西,在08年google把它贡献给了开源社区,随后便有越来越多的人使用它.protobuf是一个结构化信息传递的工具,主要 ...
- caffe自定义layer
caffe自带layers: http://caffe.berkeleyvision.org/tutorial/layers.html Layers: Image Data - read raw im ...
- 大规模视觉识别挑战赛ILSVRC2015各团队结果和方法 Large Scale Visual Recognition Challenge 2015
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Legend: Yellow background = winner in thi ...
- understanding backpropagation
几个有助于加深对反向传播算法直观理解的网页,包括普通前向神经网络,卷积神经网络以及利用BP对一般性函数求导 A Visual Explanation of the Back Propagation A ...
- Caffe学习系列(3):视觉层(Vision Layers)及参数
所有的层都具有的参数,如name, type, bottom, top和transform_param请参看我的前一篇文章:Caffe学习系列(2):数据层及参数 本文只讲解视觉层(Vision La ...
- 转 Caffe学习系列(3):视觉层(Vision Layers)及参数
所有的层都具有的参数,如name, type, bottom, top和transform_param请参看我的前一篇文章:Caffe学习系列(2):数据层及参数 本文只讲解视觉层(Vision La ...
随机推荐
- DIY一些基于netty的开源框架
几款基于netty的开源框架,有益于对netty的理解和学习! 基于netty的http server框架 https://github.com/TogetherOS/cicada 基于netty的即 ...
- react——获取数据ajax()、$.ajax()、fetch()、axios
ajax() import React from 'react'; import ReactDom from 'react-dom'; import ajax from './tool.js'; cl ...
- 贝叶斯优化(Bayesian Optimization)深入理解
目前在研究Automated Machine Learning,其中有一个子领域是实现网络超参数自动化搜索,而常见的搜索方法有Grid Search.Random Search以及贝叶斯优化搜索.前两 ...
- 2016221 Java第二周学习补充
对switch语句的理解 在程序中遇到switch时,要将switch后的表达式与后续程序中的case常量进行比较,如若相等,程序将执行后面所有的case语句,直到遇到break 为止.如果走完整个程 ...
- 使用@RequestBody将请求体映射到Action方法参数中
@PostMapping("/user") public User create(@RequestBody User user){ System.out.println(user. ...
- 如何在Delphi 中使用 DevExpressVCL的 CxGrid与CxTreeList,编辑某列后计算另一列的值
如何在Delphi 中使用 DevExpressVCL的 CxGrid与CxTreeList,编辑某列后计算另一列的值:比如 输入 单价,数量,计算金额. 参考: 1. 输入 单价,数量,计算金额 ...
- boost--asio--读写大总结
NO.1 ASIO 读操作大总结: A. Boos::asio::read 同步读方式 void client::read_data(char * sourse , int num ) { bo ...
- 在Ubuntu 16.04下安装nodejs
源安装: 1.curl -sL https://deb.nodesource.com/setup_5.x | sudo -E bash - 2.sudo apt-get install -y node ...
- ffmpeg h264 encdoer 速度对比
h264_qsv frame= 250 fps=0.0 q=-0.0 Lsize= 1401kB time=00:00:10.00 bitrate=1146.8kbits/s speed= 14x l ...
- "贪吃蛇"-css3效果
clip : http://www.w3school.com.cn/cssref/pr_pos_clip.asp 姜糖水 : http://www.cnphp6.com/archives/60 ...