TI MSP430工程配置及2019年电赛A题编程示例(使用430 F5529)
配置
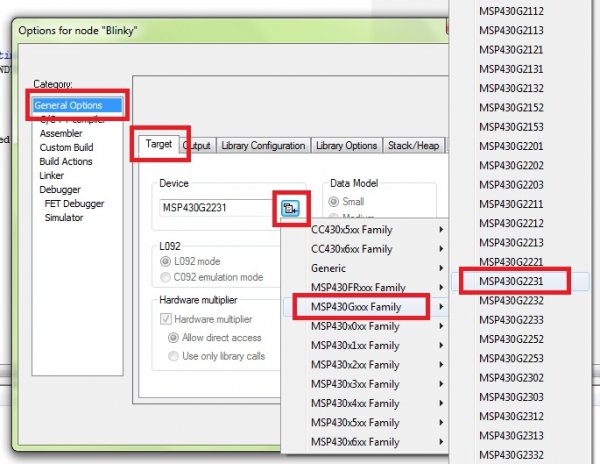
第一步:右击工程,选择Options

第二步:在General Options的Target选项卡里选择对应的器件Device,这里是MSP430G2231
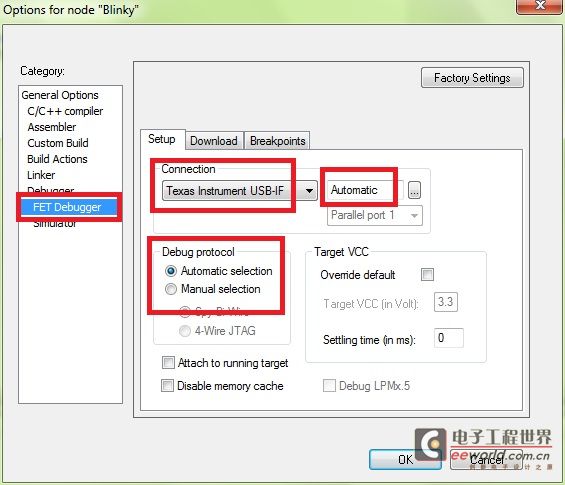
第三步:在Debugger里选择FET Debugger:

第四步: 检查FET Debugger里的设置是否正确,这里是Texas Instrument USB-IF采用Automatic方式
这里选择Automatic与Automatic selection,当用串口会自动连接上串口。
第五步:编译程序,下载验证
电赛A题源码
小车代码
/*!
* COPYRIGHT NOTICE
* Copyright (c) 2016,CTGU-GB
* All rights reserved.
*
*
* @file main.c
* @brief MSP430F5529 平台主程序 * @author CTGU-GB
* @version v2.7
* @date 2016-11-26
*/
#include "include.h"
#include "KEY.h" int key1,key2,stop_flag=; int key_flag = ; //定时器中断处理函数
uint16_t Motor1,Motor2;
__interrupt void TIMER_TB0_A0_IRQ_Handler()
{ GPIO_TurnBit (P4, ); } //ADC 中断处理函数
float ad;
uint16_t ADC_MCH1,ADC_MCH2,Motor1,Motor2;
__interrupt void ADC_IRQ_Handler()
{
if(ADC_GetITStatus(ADC_CH2) == TRUE)
{
ad = ADC_ReadChanelValue (ADC_CH2)*3.3/; //读取后会自动清除标志位
ADC_ClearITPendingBit(ADC_CH2);
}
if(ADC_GetITStatus(ADC_CH1) == TRUE)
{
ad = ADC_ReadChanelValue (ADC_CH1)*3.3/; //读取后会自动清除标志位
ADC_ClearITPendingBit(ADC_CH1);
} } uint8_t key_data()
{
static _Bool glag=;
uint8_t key_value=;
if((KEY_isPressed(KEY1)==||KEY_isPressed(KEY2)==)&&glag==)
{
DELAY_MS();
if((KEY_isPressed(KEY1)==||KEY_isPressed(KEY2)==)&&glag==)
{
glag=;
if(KEY_isPressed(KEY1)==) key_value=;
if(KEY_isPressed(KEY2)==) key_value=;
}
}
else if(KEY_isPressed(KEY1)==||KEY_isPressed(KEY2)==) glag=; return key_value;
} void main()
{
uint8_t key_val = ;
uint8_t Data[];
int a,b,c = ;
DisableInterrupts(); //禁止总中断 LED_Init(LED_ALL); //LED灯初始化
KEY_Init(KEY1,NULL);
KEY_Init(KEY2,NULL);
//LED_On (LED1);
OLED_Init(); //Oled初始化
GPIO_Init(P3,,GPI|PULL_UP);
GPIO_Init(P3,,GPI|PULL_UP);
GPIO_Init(P2,,GPI|PULL_UP);
GPIO_Init(P1,,GPI|PULL_UP);
GPIO_Init(P7,,GPI|PULL_UP);
//GPIO_ReadBit(P2,1) == 0 读取按键按下为0 //ADC配置///
ADC_Init(ADC_CH1,ADC_VREF_3_3V,ADC_10bit); //初始化通道,P6.1 // 定时器配置
Set_Vector_Handler(VECTOR_TIMER0_B0,TIMER_TB0_A0_IRQ_Handler); //设置定时器TA1的中断服务程序为:TIMER1_A0_IRQ_Handler TIMER_Interval_Ms(TIMER_B0, ); //设置TA1为定时中断,中断时间为500Ms
TIMER_ITConfig (TIMER_B0, TIMER_CCR0_IRQn, ENABLE); //使能TIMER的某一个中断
///////////////////////////////////////////////////////////////////////////////////////////// // pwm配置
// 定时器PWM输出初始化
TIMER_PWM_MultiChannel_Init(TIMER_A2, , , TIMER_CH1, TIMER_CH2);
//GPIO_ResetBits(PORT2, GPIO_Pin_4|GPIO_Pin_5);
//TIMER_CH1\TIMER_CH2:{P2,4},{P2,5}
//PWM输出占空比设置
//999为满占空比与设置频率无关
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,);
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,);
//////////////////////////////////////////////////////////////////////////////////////////////// /*
///usrt配置////
//配置串口1:TX={P4,4},.RX={P4,5}
UART_Init (UART1,9600); //初始化UART1模块,波特率115200,波特率高时最好把主时钟 设高些
Set_Vector_Handler(VECTOR_UART1,UART_RX_IRQ_Handler); //设置接收中断向量
UART_ITConfig (UART1,UART_RX_IRQn,TRUE); //开串口接收中断
////////////////////////////
*/ EnableInterrupts();
OLED_PrintfAt(FONT_ASCII_6X8,,,"function:");
OLED_PrintfAt(FONT_ASCII_6X8,,,"ADC1:");//显示一个字符
OLED_PrintfAt(FONT_ASCII_6X8,,,"key_count1:");//显示一个字符
OLED_PrintfAt(FONT_ASCII_6X8,,,"key_count2:");//显示一个字符
OLED_PrintfAt(FONT_ASCII_6X8,,,"recvie1:");//显示一个字符
OLED_PrintfAt(FONT_ASCII_6X8,,,"recvie2:");//显示一个字符
OLED_PrintfAt(FONT_ASCII_6X8,,,"Stop_flag:");//显示一个字符
while()
{ /////////////////////要求2//////////////// Data[] = Flash_Read(MAX_SEGMENT,,uint8_t);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",Data[]);
if(Data[] == )
{
while(){
float ad = ADC_ReadChanelOnce (ADC_CH1)*3.3/;
OLED_PrintfAt(FONT_ASCII_6X8,,,"%0.2f",ad);
if(ad<0.5)
{ TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); //右
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); //左 while()
{ if(KEY_isPressed(KEY2))
{ key_flag =;
break; }
//运行中检测是否在充电标志,中心
if(GPIO_ReadBit(P7,) == )
{
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",);
stop_flag =;
break;
}
else
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); a=GPIO_ReadBit(P3,); b=GPIO_ReadBit(P3,); ////////// //检测左边是否到达
if(a)
{
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",);
}
else{
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //左
} ////////// //检测右边是否到达
if(b)
{
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,);
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //右
}
else{
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //右 }
if(a == &b == )
{ TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); //左
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); //右 } }
if(stop_flag == )
{
stop_flag = ;
break; } if(key_flag == )
{
key_flag = ;
break; } }
}
} /////////////////////要求3//////////////////////////////// Data[] = Flash_Read(MAX_SEGMENT,,uint8_t);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",Data[]);
if(Data[] == )
{
while(){
float ad = ADC_ReadChanelOnce (ADC_CH1)*3.3/;
OLED_PrintfAt(FONT_ASCII_6X8,,,"%0.2f",ad);
if(ad<0.5)
{ TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); //右
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); //左 while()
{ if(KEY_isPressed(KEY2))
{ key_flag =;
break; } //运行中检测是否在充电标志,中心
if(GPIO_ReadBit(P7,) == )
{ OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); }
else
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); a=GPIO_ReadBit(P3,); b=GPIO_ReadBit(P3,); ////////// //检测左边是否到达
if(a)
{
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",);
}
else{
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //左
} ////////// //检测右边是否到达
if(b)
{
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,);
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //右
}
else{
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //右 }
if(a == &b == )
{ TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); //左
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); //右 } } if(key_flag == )
{
key_flag = ;
break; } }
}
} /////////////////////要求4///////////////////////// Data[] = Flash_Read(MAX_SEGMENT,,uint8_t);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",Data[]);
if(Data[] == )
{
DELAY_MS();
while(){
//float ad = ADC_ReadChanelOnce (ADC_CH1)*3.3/1023;
//OLED_PrintfAt(FONT_ASCII_6X8,2,30,"%0.2f",ad); TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); //右
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); //左 while()
{ if(KEY_isPressed(KEY2))
{ key_flag =;
break; } //运行中检测是否在充电标志,中心
if(GPIO_ReadBit(P7,) == )
{ OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); }
else
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); a=GPIO_ReadBit(P3,); b=GPIO_ReadBit(P3,); ////////// //检测左边是否到达
if(a)
{
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",);
}
else{
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //左
} ////////// //检测右边是否到达
if(b)
{
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,);
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //右
}
else{
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",); //右 }
if(a == &b == )
{ TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH1,); //左
TIMER_PWM_SetChannelDuty(TIMER_A2,TIMER_CH2,); //右 } } if(key_flag == )
{
key_flag = ;
break; } }
} ///////////////////////////设置////////////////////
//key1-p2.1
//key2-p1.1 //p2.1设置,p1.1确定
while()
{
for(int i=;i<;i++)
{
Data[i] = Flash_Read(MAX_SEGMENT,i,uint8_t);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",Data[i]);
}
key_val = key_data();
if(key_val)
{
if(key_val == )
{
key2 ++;
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",key2);
}
else
{
//赋值
Data[]=key2; //先清除flash,再存
Flash_Erase_Segment(MAX_SEGMENT);
Flash_Write_buf (MAX_SEGMENT,,,Data); //数据清零
Data[]=; key1 ++;
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",key1);
//再读取
for(int i=;i<;i++)
{
Data[i] = Flash_Read(MAX_SEGMENT,i,uint8_t);
OLED_PrintfAt(FONT_ASCII_6X8,,,"%d",Data[i]); }
if(Data[] !=) break; }
}
else
{ //sOLED_PrintfAt(FONT_ASCII_6X8,3,70,"%d",0);
} }
///////////////////////////////////////////////////////////// }
}
底板控制
/*!
* COPYRIGHT NOTICE
* Copyright (c) 2016,CTGU-GB
* All rights reserved.
*
*
* @file main.c
* @brief MSP430F5529 平台主程序 * @author CTGU-GB
* @version v2.7
* @date 2016-11-26
*/
#include "include.h" //定时器中断处理函数
uint16_t Motor1,Motor2;
__interrupt void TIMER_TB0_A0_IRQ_Handler()
{ //GPIO_TurnBit (P4, 7); } void main()
{ int Kal = ;
DisableInterrupts(); //禁止总中断 LED_Init(LED_ALL); //LED灯初始化
OLED_Init(); //Oled初始化
LED_Off(LED1);
LED_Off(LED2);
GPIO_Init(P6,,GPI|PULL_UP);
GPIO_Init(P6,,GPI|PULL_UP);
GPIO_Init(P6,,GPI|PULL_UP);
GPIO_Init(P6,,GPI|PULL_UP); GPIO_Init(P1,,GPI|PULL_UP);
GPIO_Init(P1,,GPI|PULL_UP);
GPIO_Init(P1,,GPI|PULL_UP);
GPIO_Init(P1,,GPI|PULL_UP); // 定时器配置
Set_Vector_Handler(VECTOR_TIMER0_B0,TIMER_TB0_A0_IRQ_Handler); //设置定时器TA1的中断服务程序为:TIMER1_A0_IRQ_Handler
TIMER_Interval_Ms(TIMER_B0, ); //设置TA1为定时中断,中断时间为500Ms
TIMER_ITConfig (TIMER_B0, TIMER_CCR0_IRQn, ENABLE); //使能TIMER的某一个中断
/////////////////////////////////////////////////////////////////////////////////////////////
GPIO_ResetBits(PORT6, GPIO_Pin_1 |GPIO_Pin_2|GPIO_Pin_3); EnableInterrupts(); while()
{ /*
//开发射圈1
GPIO_SetBits(PORT6, GPIO_Pin_0);
//关其他发射圈
GPIO_ResetBits(PORT6, GPIO_Pin_1 |GPIO_Pin_2|GPIO_Pin_3);
while(1)
{ while(GPIO_ReadBit(P1,2) ==1)
{ }
LED_Off(LED1);
while(GPIO_ReadBit(P1,2) ==0) { }
LED_On(LED1);
while(GPIO_ReadBit(P1,2) ==1) { }
LED_Off(LED1);
GPIO_SetBits(PORT6, GPIO_Pin_0);
break; }
*/ while()
{ if(GPIO_ReadBit(P1,) == )
{ LED_On(LED1);
//开发射圈1
GPIO_SetBits(PORT6, GPIO_Pin_1);
//关其他发射圈
GPIO_ResetBits(PORT6, GPIO_Pin_2 |GPIO_Pin_3); while(GPIO_ReadBit(P1,) ==)
{ }
LED_Off(LED1);
while(GPIO_ReadBit(P1,) ==) { }
LED_On(LED2); while(GPIO_ReadBit(P1,) ==)
{ }
LED_Off(LED2);
GPIO_ResetBits(PORT6, GPIO_Pin_1);
} else if(GPIO_ReadBit(P1,) == )
{
LED_On(LED1);
//开发射圈1
GPIO_SetBits(PORT6, GPIO_Pin_2);
//关其他发射圈
GPIO_ResetBits(PORT6, GPIO_Pin_1 |GPIO_Pin_3); while(GPIO_ReadBit(P1,) ==)
{ }
LED_Off(LED1);
while(GPIO_ReadBit(P1,) ==) { }
LED_On(LED2); while(GPIO_ReadBit(P1,) ==)
{ }
LED_Off(LED2);
GPIO_ResetBits(PORT6, GPIO_Pin_2);
} else if(GPIO_ReadBit(P1,) == )
{
LED_On(LED1);
//开发射圈1
GPIO_SetBits(PORT6, GPIO_Pin_3);
//关其他发射圈
GPIO_ResetBits(PORT6, GPIO_Pin_1 |GPIO_Pin_2); while(GPIO_ReadBit(P1,) ==)
{ }
LED_Off(LED1);
while(GPIO_ReadBit(P1,) ==) { }
LED_On(LED2); while(GPIO_ReadBit(P1,) ==)
{ }
LED_Off(LED2);
GPIO_ResetBits(PORT6, GPIO_Pin_3);
} //GPIO_SetBits (PORT1, GPIO_Pin_0|GPIO_Pin_1); //P1.0,P1.1输出高电平
//GPIO_SetBits() ; //////////////////延时////////////////////
//DELAY_MS(500); }
}
}
8.15号后会对代码思路及硬件做个记录。这几天会稍微休息一会。
TI MSP430工程配置及2019年电赛A题编程示例(使用430 F5529)的更多相关文章
- ACM-ICPC 2019南昌网络赛I题 Yukino With Subinterval
ACM-ICPC 2019南昌网络赛I题 Yukino With Subinterval 题目大意:给一个长度为n,值域为[1, n]的序列{a},要求支持m次操作: 单点修改 1 pos val 询 ...
- 模拟电磁曲射炮_H题 方案分析【2019年电赛】【刘新宇qq522414928】
请查看我的有道云笔记: 文档:电磁曲射炮分析.note链接:http://note.youdao.com/noteshare?id=26f6b6febc04a8983d5efce925e92e21
- [2019南京网络赛D题]Robots
题目链接 2019.9.2更新 第二天睡醒想了想发现好像搜一遍就可以过,赛时写的花里胡哨的还错了,太菜了QAQ #include<bits/stdc++.h> using namespac ...
- 2019建模美赛B题(派送无人机)M奖论文
昨天上午出了建模美赛的结果,我们小组获得的是M奖,感觉挺开心的.我一直觉得拿O奖那种是个概率事件,需要天时地利人和的各种因素都合适才行,所以看到自己是M奖,感觉自己的能力已经得到了认可就很满意了.今天 ...
- Comet OJ - 2019国庆欢乐赛 C题 两排房子
###题目链接### 题目大意:这里有横着的两排房子,给你每个房子的左端点和右端点.若两排房子中分别有两个房子 x y ,他们在横坐标上有重叠部分(端点重叠也算),则被称为 “对门” 关系. 问你总共 ...
- ACM-ICPC 2019南昌网络赛F题 Megumi With String
ACM-ICPC 南昌网络赛F题 Megumi With String 题目描述 给一个长度为\(l\)的字符串\(S\),和关于\(x\)的\(k\)次多项式\(G[x]\).当一个字符串\(str ...
- 2019上海网络赛B题(差分 + 离散化 or 差分 + 思维)
这题.....队里都没怎么训练差分,导致败北...写了一堆线段树嘤嘤嘤,到最后也是超时,比赛结束后看到了差分的思想于是就去学了一手. 其实了解差分思想的一眼就能看出来是差分了.但是如果对n差分的话很明 ...
- [2019上海网络赛F题]Rhyme scheme
题目链接 题意,求出合法的长度为n的字典序第k小字符串,合法的定义为除了最后一位,每一位的取值范围为'A'到'A'+pos-1,而最后一位的取值范围'A'到当前字符串最大值+1. 队友tql,Orz ...
- [2019上海网络赛J题]Stone game
题目链接 CSLnb! 题意是求出给定集合中有多少个合法子集,合法子集的定义为,子集和>=总和-子集和$\& \&$子集和-(子集的子集和)<=总和-子集和. 其实就是很简 ...
随机推荐
- java虚拟机-GC-GC算法
在C/C++中是由程序员自己去申请.管理和释放内存的,因此没有GC的概念.而在Java中,专门有一个用于垃圾回收的后台线程来进行监控.扫描,自动将一些无用的内存进行释放.下面介绍几种常见的GC算法. ...
- mysql重复数据下,删除一条重复数据
delete from information where id in (select id from (select max(id) as id,count(*) as ccc from infor ...
- 数据结构-循环队列(Python实现)
今天我们来到了循环队列这一节,之前的文章中,我介绍过了用python自带的列表来实现队列,这是最简单的实现方法. 但是,我们都知道,在列表中删除第一个元素和删除最后一个元素花费的时间代价是不一样的,删 ...
- ElasticSearch7.2安装
1.环境 Java -version:java11 centos: 7.2 elasticsearch: 7.2 2.获取压缩包 wget https://artifacts.elastic.co/d ...
- CSDN怎么一键转载别人的博客
在参考"如何快速转载CSDN中的博客"后,由于自己不懂html以及markdown相关知识,所以花了一些时间来弄明白怎么转载博客,以下为转载CSDN博客步骤和一些知识小笔记. 参考 ...
- NOIP2018普及T1暨洛谷P5015 标题统计 题解
题目链接:https://www.luogu.org/problemnew/show/P5015 分析: 这道题大概是给个签到分吧.很显然的字符串操作.本篇题解主要帮助初学者,请大佬略过. 首先给大家 ...
- 【小程序】小程序中设置 tabBar
小程序中 tabBar 的设置,tabBar 就是底部导航栏,在app.json中配置. list 为数组至少两项.tab栏的 position 为 top 时间,不显示图标. "tabBa ...
- HttpWebRequest的使用之Get和Post的差别(C#)
这两天做的是通过一个HttpWebRequest将采集地址发送到服务端,服务端会返回一个JSON格式的字符串,然后我这边再对这个JSON进行反序列化,得到我想要的数据.在这篇文章里我简单介绍一下Htt ...
- 基于高德开放平台的 NODE 天气信息组件
看看了画在手上的Armani手表,马上就快到了下班的时间了,心里总觉的空唠唠的, 好像空缺了什么一样,仔细的想了一想,微微叹了一口气,觉得是时候在这里和大家分享一下原因了........ 首先: ## ...
- 原生应用使用cordova并与h5应用分离
个人原创地址:https://www.jianshu.com/p/1ad536e76640 1.需求与使用场景 打开一个新页面,要求能够加载本地zip格式的h5应用,该应用使用了某些原生能力:能够 ...