改进初学者的PID-积分饱和
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/04/improving-the-beginner’s-pid-reset-windup/
1、问题所在

积分饱和是一个陷阱,它可能比任何其他内容对初学者有更多的要求。当 PID 认为它可以做一些它做不到的事情时,就会发生这种情况。例如,Arduino 上的 PWM 输出接受0-255 之间的值。默认情况下,PID 不知道这一点。如果它认为300-400-500 会奏效,它将尝试那些期望得到它所需要的东西的值。由于在现实中,该值被限制在 255,它只会继续尝试越来越多的数字,而不会取得任何进展。
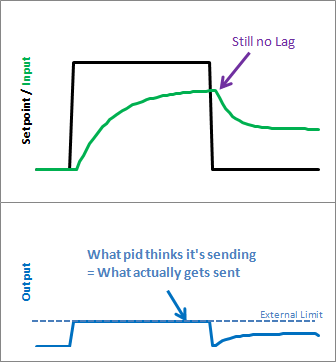
这个问题以奇怪的滞后的形式显现出来。上面我们可以看到,输出以 "非常兴奋" 的方式超出了外部限制。当设定值下降时,输出必须在低于255的限制线之前逐步减少。
2、解决方案–步骤1

有几种方法可以缓解积分饱和,但我选择的方法如下:告诉 PID 输出限制是什么。在下面的代码中,您将看到现在有一个 SetOuputLimits函数。一旦达到任一限制,pid 停止求和 (积分)。它知道没有什么可做的; 它知道自己已经无能为力。由于输出不会积分饱和,所以当设定值下降到我们可以做一些事情的范围内时,我们会得到立即的响应。
3、解决方案–步骤2
不过,请注意,在上面的图表中,虽然我们摆脱了那个积分饱和滞后,但我们并没有完成这一步。PID认为它正在发送的东西,和刚刚发送的东西间还是存在偏差。为什么?比例项和 (在较小的程度上) 微分项的存在。
尽管积分项已被安全地钳位,但P和D仍在增加他们两的份额,产生的结果也有可能会高于输出限制。在我看来,这依然是不可接受的。如果用户调用名为 "SetOutputLimits" 的函数,他们必须假定这意味着“输出将保留在这些值之内”。因此,对于步骤2,我们将其作为一个有效的假设。除了钳位积分项之外,我们还要钳位输出值,使其保持在预期的位置。
(注意: 您可能会问为什么我们需要钳位这两个。如果我们要控制输出限制,为什么要单独钳位积分项呢?如果我们只是钳位输出,积分项就会不停的增长。虽然在向上的过程中,输出看起来会很好,但我们会看到在下降的过程中,会受到积分饱和的影响。
4、代码
/*working variables*/
unsigned long lastTime;
double Input,Output,Setpoint;
double ITerm,lastInput;
double kp,ki,kd;
int SampleTime = ; //1 sec
double outMin,outMax;
void Compute()
{
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
{
/*Compute all the working error variables*/
double error = Setpoint - Input;
ITerm+= (ki * error);
if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
double dInput = (Input - lastInput); /*Compute PID Output*/
Output = kp * error + ITerm- kd * dInput;
if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin; /*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
}
} void SetTunings(double Kp,double Ki,double Kd)
{
double SampleTimeInSec = ((double)SampleTime)/;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
} void SetSampleTime(int NewSampleTime)
{
if (NewSampleTime > )
{
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
}
} void SetOutputLimits(double Min,double Max)
{
if(Min > Max) return;
outMin = Min;
outMax = Max; if(Output > outMax) Output = outMax;
else if(Output < outMin) Output = outMin; if(ITerm> outMax) ITerm= outMax;
else if(ITerm< outMin) ITerm= outMin;
}
添加了一个新函数,允许用户指定输出限制 [52-63 行]。这些限制用于钳位积分项 [17-18] 和输出 [23-24]
5、最终结果
正如我们所看到的,积分饱和被消除了。此外,输出将保留在我们希望的位置。这意味着无需对输出进行外部钳位。如果希望它的范围从23到 167,您可以将它们设置为输出限制。
欢迎关注:

改进初学者的PID-积分饱和的更多相关文章
- PID控制器开发笔记之三:抗积分饱和PID控制器的实现
积分作用的引入是为了消除系统的静差,提高控制精度.但是如果一个系统总是存在统一个方向的偏差,就可能无限累加而进而饱和,极大影响系统性能.抗积分饱和就是用以解决这一问题的方法之一.这一节我们就来实现抗积 ...
- 改进初学者的PID-介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-测量的比例编码
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-修改整定参数
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-采样时间
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-正反作用
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-测量的比例介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-初始化
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-手自动切换
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
随机推荐
- js 定时器 执行一次和重复执行
1- 执行一次(延时定时器) var t1 = window.setTimeout(function() { console.log('1秒钟之后执行了') },1000) window.clearT ...
- Flume组件
1.什么是Flume:apache顶级项目,主要用来做数据采集.分布式.高可用,将海量日志进行采集.聚合.传输的系统.能够对数据进行简单处理在发送到接收方. 2.Flume组件:source.chan ...
- [Angular] How to show global loading spinner for application between page navigation
app.component.ts: import { Component, OnInit } from "@angular/core"; import { select, Stor ...
- git分支相关的命令
Git 分支管理及结合gitlab的使用 说明有关gitlab的说明及基本操作,请参考:https://blog.51cto.com/wutengfei/2090253使用git分支的作用,我们先来说 ...
- Kafka 通过python简单的生产消费实现
使用CentOS6.5.python3.6.kafkaScala 2.10 - kafka_2.10-0.8.2.2.tgz (asc, md5) 一.下载kafka 下载地址 https://ka ...
- 017_Python3 数据结构
本章节我们主要结合前面所学的知识点来介绍Python数据结构. ***************************** 1.列表 Python中列表是可变的,这是它区别于字符串和元组的最重 ...
- (尚007)Vue强制绑定class和style
注意:class和style的值是动态的值 1.test007.html <!DOCTYPE html><html lang="en"><head&g ...
- saltstack 基础模块
Salt 在 linux 系统下 基础操作 1.更改权限 # salt 2.更改用户 # salt '172.16.3.9' file.chown /root/test test test 3.复制文 ...
- 【dp】P1541 乌龟棋
链接: https://www.luogu.org/problemnew/show/P1541 [思路]: 用f[a][b][c][d]表示,第一张卡用a张,第二张卡用b张..........然后就盘 ...
- 印象笔记作为todo(GTD相关)的一个尝试
印象笔记作为todo(GTD相关)的一个尝试 上来说结果: 失败 原则上的原因: 印象笔记作为一个比较重的笔记, 重点也不在于这一点, 虽然是可以新建清单之类的. 还是比较小巧的好一些. 最后使用的软 ...