基于24位AD转换模块HX711的重量称量实验(已补充皮重存储,线性温度漂移修正)
转载:http://www.geek-workshop.com/thread-2315-1-1.html
以前在X宝上买过一个称重放大器,180+大洋。原理基本上就是把桥式拉力传感器输出的mV级信号放大到5V供单片机读取。连接实验电路的时候很完美,能实现重量的转换,但是实际组装后却发现这种A/A模块受到的干扰太严重了,包括电源的干扰,导线长短的干扰,导线位置变化的干扰,无线电的干扰等等等等……实在是恼人。
后来感觉是思路错误了,就不该用模拟信号来传输,于是决定使用A/D模块来把重量转换成数字信号传输,A/D模块就固定在离传感器最近的地方,将输出的数字信号用导线传输给单片机,这样能很大程度减小各种干扰。
在网上搜了一下A/D模块,基本上有两种廉价成品:HX711和PCF8591,它们分别是8位转换模块和24位转换模块。
PCF8591:
<ignore_js_op>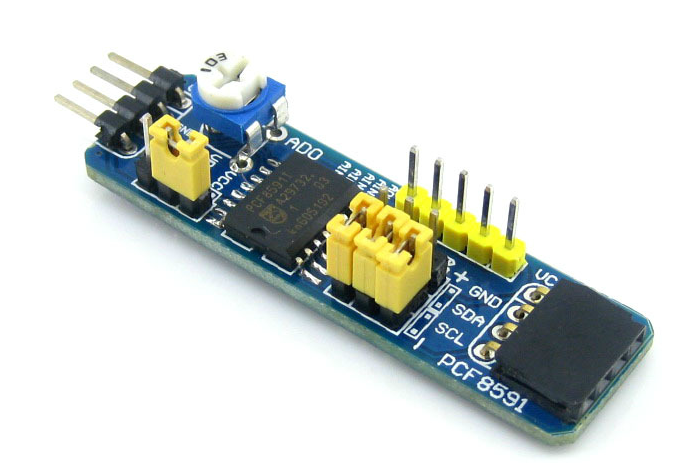
功能简介: 基于I2C接口的AD/DA转换模块,8位精度,四通道AD,单通道DA,电压输出型
最大特点: 1. 支持两种接口类型接入目标板:排针或排座
2. 支持I2C总线级联(通过排针、排座对接的方法,可同时使用多个I2C模块)
典型应用: 低速AD/DA转换
主要资源: PCF8591,I2C接口排针,I2C接口排座,可调电阻,AD输入口,DA输出口,地址跳线端口
HX711: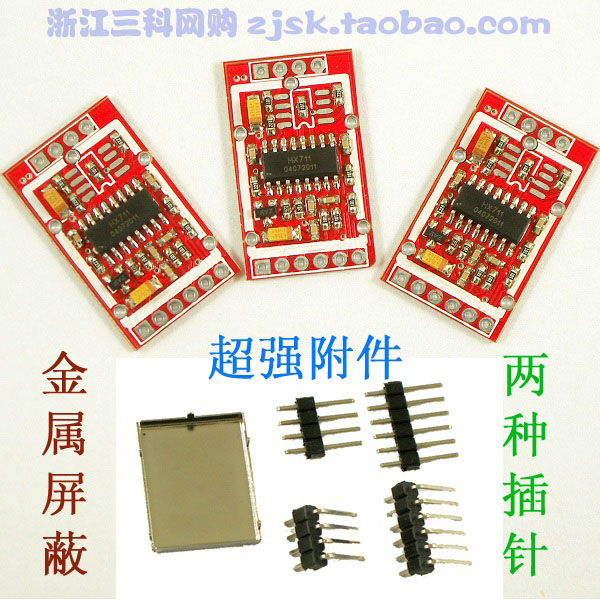
模块工作电压:4.8-5.5v
典型电流 1.6mA
体积:长 2.9cm * 宽 1.7cm * 高 0.4cm
● 带金属屏蔽,强抗干扰,预留MCU(STC15F104)位置,可自行升级二次开发。
● 两路可选择差分输入
● 片内低噪声可编程放大器,可选增益为32、64 和128
● 片内稳压电路可直接向外部传感器和芯片内A/D 转换器提供电源
● 片内时钟振荡器无需任何外接器件,必要时也可使用外接晶振或时钟
● 上电自动复位电路
● 简单的数字控制和串口通讯:所有控制由管脚输入,芯片内寄存器无需编程
● 可选择10Hz 或80Hz 的输出数据速率
● 同步抑制50Hz 和60Hz 的电源干扰
● 耗电量(含稳压电源电路):
典型工作电流:< 1.7mA, 断电电流:< 1μA
● 工作电压范围:2.6 ~ 5.5V
● 工作温度范围:-20 ~ +85℃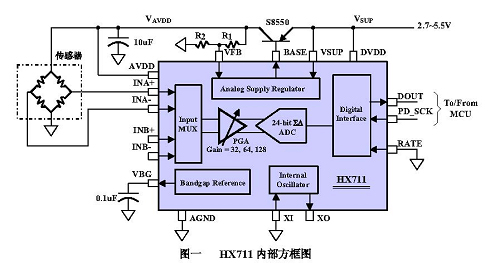
===============================我叫分割线=================================
我要使用的拉力传感器为传统的桥式传感器,量程1kg,想要达到1g的精度,这就要求模块输出位数至少为10位(2^10=1024),8位的PCF8591无法胜任,因为它的精度只有2^8=256位。所以决定使用HX711作为我的A/D模块,而且我选的HX711模块还带屏蔽壳,正符合我的要求。
先来看一下该模块的常用接法: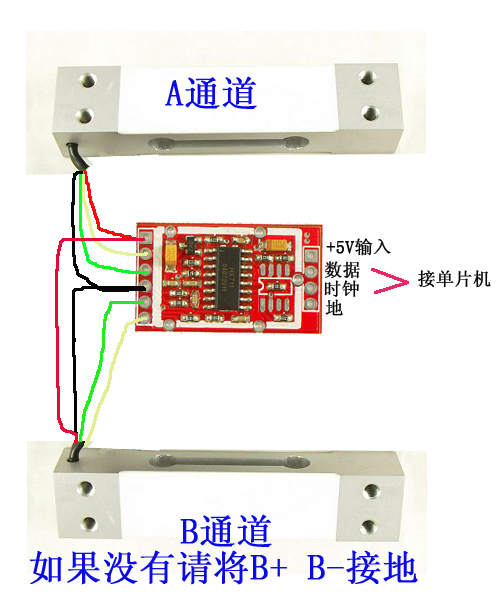
模拟输入
通道 A 模拟差分输入可直接与桥式传感器的差分输出相接。由于桥式传感器输出的信号较小,为了充分利用A/D 转换器的输入动态范围,该通道的可编程增益较大,为128 或64。这些增益所对应的满量程差分输入电压分别±20mV 或±40mV。
通道B 为固定的32 增益,所对应的满量程差分输入电压为±80mV。通道B 应用于包括电池在内的系统参数检测。
供电电源
数字电源(DVDD)应使用与MCU 芯片相同的的数字供电电源。HX711 芯片内的稳压电路可同时向 A/D 转换器和外部传感器提供模拟电源。稳压电源的供电电压(VSUP)可与数字电源(DVDD)相同。稳压电源的输出电压值(VAVDD)由外部分压电阻R1、R2 和芯片的输出参考电压VBG 决定(图1),VAVDD=VBG(R1+R2)/R2。应选择该输出电压比稳压电源的输入电压(VSUP)低至少100mV。
如果不使用芯片内的稳压电路,管脚VSUP应连接到DVDD 或AVDD 中电压较高的一个管脚上。管脚VBG 上不需要外接电容,管脚VFB 应接地,管脚BASE 为无连接。时钟选择如果将管脚 XI 接地,HX711 将自动选择使用内部时钟振荡器,并自动关闭外部时钟输入和晶振的相关电路。这种情况下,典型输出数据速率为10Hz 或80Hz。如果需要准确的输出数据速率,可将外部输入时钟通过一个20pF 的隔直电容连接到XI管脚上,或将晶振连接到XI 和XO 管脚上。这种情况下,芯片内的时钟振荡器电路会自动关
闭,晶振时钟或外部输入时钟电路被采用。此时,若晶振频率为11.0592MHz, 输出数据速率为准确的10Hz 或80Hz。输出数据速率与晶振频率以上述关系按比例增加或减少。使用外部输入时钟时,外部时钟信号不一定需要为方波。可将MCU 芯片的晶振输出管脚上的时钟信号通过20pF 的隔直电容连接到XI管脚上,作为外部时钟输入。外部时钟输入信号的幅值可低至150mV。
串口通讯
串口通讯线由管脚PD_SCK 和DOUT 组成,用来输出数据,选择输入通道和增益。当数据输出管脚DOUT 为高电平时,表明
A/D 转换器还未准备好输出数据,此时串口时钟输入信号PD_SCK 应为低电平。当DOUT 从高电平变低电平后,PD_SCK 应输入25 至27 个不等的时钟脉冲(图二)。其中第一个时钟脉冲的上升沿将读出输出24 位数据的最高位(MSB),直至第24 个时钟脉冲完成,24 位输出数据从最高位至最低位逐位输出完成。第25至27 个时钟脉冲用来选择下一次A/D 转换的输入通道和增益,参见表三。
<ignore_js_op>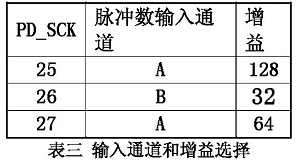
PD_SCK 脉冲数输入通道 增益
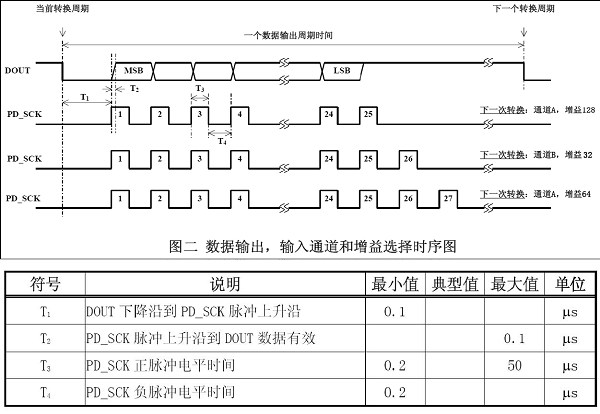
时序图
PD_SCK 的输入时钟脉冲数不应少于25 或多于27,否则会造成串口通讯错误。当A/D 转换器的输入通道或增益改变时,A/D 转换器需要4 个数据输出周期才能稳定。DOUT 在4 个数据输出周期后才会从高电平变低电平,输出有效数据。
==============================我也是分割线================================
好了,看了这么多原理很多人一定已经晕了,下面来简单的:HX711在Arduino上的使用!
经过各种搜索,仅仅在Google Project上找到了一个 phk@FreeBSD.ORG 写的 Arduino 库(感谢啊!),功能很完善,而且支持多版本的Arduino。
我备份在这里吧,以免以后找不到:https://pan.baidu.com/s/1nv4eOtF
再来看一下接线: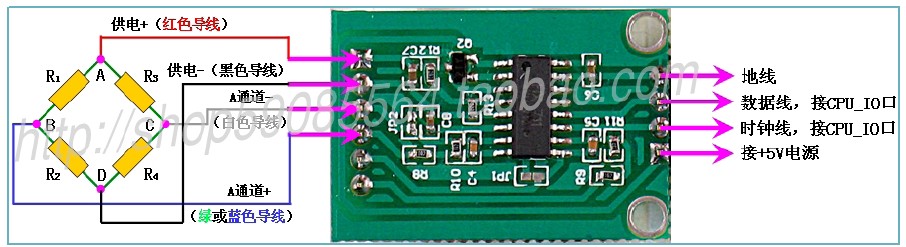
1. VCC 可以是 2.6-5.5 中的任意值,因为我们使用的是 Arduino ,所以直接5V供电,GND 接地。
2. SCK 接 Arduino 的 Pin 9,DT 接 Pin10,这两个接脚可以在程序中改变。
3. E+、E-、A+ 和 A- 分别接桥式传感器的:激励电压正、负,输出电压正、负
(E+ 接红线;E- 接黑线;A+ 接绿或蓝线;A- 接白线)。
4. B+ 和 B- 接通道B的传感器,也可以通过分压电路接电源,用来检测电源电压。不用的话最好接GND,不过我试验不接也没问题。
在 Arduino 中打开示例代码,可以看到非常简单:
- #include <HX711.h> // 包含库的头文件
- HX711 hx(9, 10); // 数据接脚定义
- void setup() {
- Serial.begin(9600);
- }
- void loop()
- {
- double sum = 0; // 为了减小误差,一次取出10个值后求平均值。
- for (int i = 0; i < 10; i++) // 循环的越多精度越高,当然耗费的时间也越多
- sum += hx.read(); // 累加
- Serial.println(sum/10); // 求平均值进行均差
- }
给的示例程序非常简单,但是我查看库中含有很多示例没有给出的函数:
- HX711(byte sck, byte dout, byte amp = 128, double co = 1); // 定义 sck、dout 接脚,增益倍数(默认128)和修正系数(默认1)
- void set_amp(byte amp); // 改变增益倍数和对应的通道,至少调用一次 read() 后起作用
- bool is_ready(); // 返回 hx711 是否可用,在 read() 函数中会被调用
- long read(); // 返回传感器电压值,如果 hx711 不可用则程序会暂停在此函数
- double bias_read(); // 返回:(read() - 偏移值) * 修正系数
- void tare(int t = 10); // 将皮重添加到偏移值,影响每次 read(); 的调用
- void set_co(double co = 1); // 修改修正系数(默认为1)
- void set_offset(long offset = 0); // 修改偏移值(默认为0)
可以看到,HX711还可以使用四参数方式定义,同时指定增益倍数及修正系数。在程序运行中还可以随时改变增益倍数,修正系数以及利用偏移值实现去皮重等功能,非常实用。
这里唯一需要解释的是第一个函数,
- HX711 hx(9, 10); // 这样用说明只定义SCK和DOUT接脚,AMP默认使用A通道的128位增益,修正系数默认为1;
- HX711 hx(9, 10, 64); // 这样用说明定义SCK和DOUT接脚,AMP使用A通道的64增益,修正系数默认为1;
- HX711 hx(9, 10, 32, 1.4); // 这样用说明定义SCK和DOUT接脚,AMP使用B通道的32位增益,修正系数为1.4;
这里有关通道和增益倍数的选择,资料中已经提及过,A通道只有128和64位两种增益倍数,对应满载电压为 20mV 和 40mV,B通道只有固定的32位增益倍数,满载电压为 80mV,使用时各个通道输入电压不要超过对应增益倍数的满载电压。当然,程序中额可以随时切换增益倍数和通道,使用set_amp(amp)函数即可,当然,amp 的值只能是 128、64或32。
再强调一句,如果增益倍数选择32位增益,那么读出的数据就是B通道的。
==============================我真的是分割线================================
下面写一个具体应用示例:
我选择的传感器参数如下:
满量程输出电压=激励电压x灵敏度1.0mV/V
例如:供电电压是5V乘以灵敏度1.0mV/V=满量程5mV
实际上我选用的这个模块,当电源电压是5V时,供给传感器的供电电压是4V,于是我的传感器满量程电压为4mV。
这样我就完全可以选择增益倍数最高的A通道128位增益来得到最高的精度。
电子称连接图示:
图中绿色的为HX711模块,右下角为Arduino UNO,吊臂上挂着的就是桥式传感器(我连接的方式为悬吊式测拉力值),AD模块与传感器间的电线越短越好,过长的话会受到各种干扰,AD模块与Arduino之间的连线最好也不要超过30cm,如果必须加长的话,可以考虑使用带电磁屏蔽的线以及信号放大器。
首先使用库自带的例子测试一下,可以看到悬挂上1kg砝码以及托盘等部件后得到的值为:
- 1315588.75
- 1315597.75
- 1315607.37
- 1315606.75
- 1315604.75
- 1315589.62
- 1315579.62
- 1315594.25
- 1315588.75
- 1315580.25
- 1315589.00
- 1315584.25
- 1315605.50
- 1315596.12
- 1315592.25
- 1315607.75
- 1315585.75
- 1315582.87
- 1315568.75
- 1315574.75
- 1315578.00
- 1315583.12
- 1315604.62
- 1315573.50
- 1315584.25
去掉一个500g砝码后值为:
- 742865.50
- 742847.87
- 742869.00
- 742879.12
- 742873.68
- 742858.81
- 742867.81
- 742843.37
- 742862.18
- 742844.87
- 742856.50
- 742834.31
- 742831.31
- 742825.12
- 742842.31
- 742821.31
- 742816.12
- 742846.00
- 742844.00
- 742826.87
- 742818.12
- 742812.87
- 742807.18
- 742835.00
可以粗略的计算:
1315500 - 742800 = 572700
所以修正系数大概为: 500 / 572700 = 0.00087305
那么程序就可以写成(这时可以适当的减小些读取速度,增加个delay,比如让程序半分钟一读取):
- #include <HX711.h>
- HX711 hx(9, 10, 128, 0.00087305);
- void setup() {
- Serial.begin(9600);
- }
- void loop() {
- delay(500);
- double sum = 0;
- for (int i = 0; i < 10; i++)
- sum += hx.read();
- Serial.println(sum/10);
- }
编译写入Arduino后,将砝码全部取下,仅保留称体,得到结果是:
- 169640.70
- 169632.59
- 169632.90
- 169640.90
- 169632.79
- 169623.59
- 169649.79
- 169610.40
- 169615.20
- 169659.40
- 169619.90
- 169624.79
- 169614.79
- 169624.29
- 169617.79
- 169629.20
- 169604.00
- 169617.50
- 169628.20
- 169589.40
- 169602.29
- 169598.40
- 169596.40
- 169604.00
- 169612.40
- 169592.20
说明偏移值近似为 169600,那么我们在setup中调用偏移值的函数(使用bias_read()读取带修正系数及偏移值的读数,与read()对比作参考):
- #include <HX711.h>
- HX711 hx(9, 10, 128, 0.00087305);
- void setup() {
- Serial.begin(9600);
- hx.set_offset(169600);
- }
- void loop() {
- delay(500);
- double sum0 = 0;
- double sum1 = 0;
- for (int i = 0; i < 10; i++) {
- sum0 += hx.read();
- sum1 += hx.bias_read();
- }
- Serial.print(sum0/10);
- Serial.print(" ");
- Serial.println(sum1/10);
- }
这时读出的数据变为:
- 169615.20 0.01
- 169616.70 0.02
- 169613.40 0.02
- 169636.50 0.03
- 169620.70 0.02
- 169638.09 0.04
- 169625.29 0.02
- 169620.50 0.02
- 169612.29 0.01
- 169609.79 0.01
- 169624.40 0.02
- 169625.20 0.02
- 169630.00 0.03
- 169628.29 0.03
- 169606.29 0.00
- 169617.79 0.02
- 169637.90 0.03
- 169603.70 0.00
- 169605.29 0.01
- 169636.50 0.03
然后再放上500g砝码查看一下数据:
- 742492.68 500.16
- 742499.81 500.17
- 742503.81 500.17
- 742505.18 500.18
- 742507.18 500.17
- 742499.31 500.17
- 742499.50 500.17
- 742512.37 500.18
- 742521.87 500.19
- 742497.87 500.17
- 742518.12 500.18
- 742518.81 500.18
- 742520.87 500.19
- 742520.68 500.19
- 742530.18 500.20
- 742532.87 500.20
- 742543.00 500.20
- 742540.12 500.21
- 742517.00 500.19
再放上一个500g砝码试试:
- 1315286.75 1000.25
- 1315304.62 1000.25
- 1315296.62 1000.25
- 1315302.25 1000.26
- 1315302.12 1000.26
- 1315294.25 1000.25
- 1315310.00 1000.26
- 1315277.37 1000.24
- 1315283.75 1000.24
- 1315280.25 1000.23
- 1315286.75 1000.24
- 1315293.25 1000.25
- 1315309.87 1000.26
- 1315299.50 1000.25
- 1315307.12 1000.26
- 1315304.50 1000.25
- 1315301.50 1000.25
- 1315296.75 1000.25
- 1315284.50 1000.23
- 1315284.37 1000.24
- 1315308.75 1000.26
- 1315291.62 1000.25
- 1315312.75 1000.26
- 1315312.25 1000.26
可以看到第一位小数发生了大概0.2的变化,这说明我们粗略取的修正系数还不够精确,但是完全符合1g精度的要求。
接下来就是完善程序,增加去皮重的功能了,在Arduino上接一个按钮,为了阻止电磁干扰发生误判断,我采用了常输出高电平的按钮,当按下按钮的时候输出低电平,按钮接在 4 号口上:
- #include <HX711.h>
- HX711 hx(9, 10, 128, 0.00087305);
- void setup() {
- Serial.begin(9600);
- hx.set_offset(169600);
- }
- void loop() {
- if(digitalRead(4) == LOW) hx.tare();
- double sum0 = 0;
- double sum1 = 0;
- for (int i = 0; i < 10; i++) {
- sum0 += hx.read();
- sum1 += hx.bias_read();
- }
- Serial.print(sum0/10);
- Serial.print(" ");
- Serial.println(sum1/10);
- }
这样每次按下按钮的时候就可以去皮重了。
============================不要怀疑我是分割线=============================
去皮重也实现了,可是最求完美的我发现每次掉电后都要重新设置皮重,很是麻烦,于是决定将皮重信息存到EEPROM中保存,这样每次上电后就会自动读取存储的皮重信息,从0点开始称量了!
看了一下 HX711 的库,在去皮重的时候只需调用 hx.tare();,tare() 函数内容如下:
- void HX711::tare(int t) {
- double sum = 0;
- for (int i = 0; i < t; i++) {
- sum += read();
- }
- set_offset(sum / t);
- }
里面又调用了 read() 和 set_offset(),read() 不用看了,就是读取一次不带修正系数和偏移量的传感器数据。set_offset() 如下:
- void HX711::set_offset(long offset) {
- OFFSET = offset;
- }
仅仅是把偏移量赋值给OFFSET,而OFFSET会在 bias_read() 中起作用:
- double HX711::bias_read() {
- return (read() - OFFSET) * COEFFICIENT;
- }
也就是说,我们在调用 tare() 的时候如果能返回 OFFSET 值就可以存储它用作去皮重了。
不幸的是,HX711库并不允许我们这么做。也许有人要说了,那就调用 tare() 后 再调用一次 read() 来获取 OFFSET呗。这样可不行,首先调用 tare() 的时候本身就会调用 10 次 read() 并求平均值作为 OFFSET 来使用,我们再调用一次 read() 读出的数既不是之前那个平均值,精度也不如前面的平均值高,就算再求一次 10个 数的平均值,也得不到之前那个 OFFSET了,精度会大打折扣的。
看来唯一的办法就是自己手动改一下 HX711 的库,让它在调用 tare() 的时候直接返回个 OFFSET,这样就解决了我们的需求。为了和官方库区分,我们改一下库的名字,将 HX711 库文件夹复制一份改名为 HX711A ,然后将 HX711.cpp 改为 HX711A.cpp,同样 HX711.h 改为 HX711A.h。然后打开 HX711A.cpp 和 HX711A.h,作出修改。改动如下:
HX711A.cpp:
- #include <HX711.h> -> #include <HX711A.h>
- void HX711::tare(int t) { - > double HX711::tare(int t) {
- 并在 tare 函数结尾加入: return sum / t;
HX711A.h:
- #ifndef HX711_H -> #ifndef HX711A_H
- #define HX711_H -> #define HX711A_H
- void tare(int t = 10); -> double tare(int t = 10);
这样在调用 tare() 的时候就可以返回 OFFSET 值了,我们存储 OFFSET值就可以了。
可是新的问题又出现了,OFFSET 值是 double 类型的,而我们 Arduino 提供的 EEPROM 库一次仅能存储1个 char 类型数据。于是上网查资料,发现弘版有个帖子提到了多类型存储,可是相应的库编译后有点庞大,还是自己解决吧,写了个共用体实现的double类型存储,见我的帖子:http://www.geek-workshop.com/thread-2323-1-1.html,可以在程序里加入这一部分内容。
另外,经过查询资料,桥式传感器受温度影响的偏移量也不容忽视,可以在系统中加入温度传感器(例如DS18B20),并在计算重量的时候加入线性温度漂移修正,这里我就不写温度相关代码了,仅给出温度漂移修正的函数供大家参考:
- #include <HX711A.h>
- #include <EEPROM.h>
- HX711 hx(9, 10, 128, 0.00087305);
- int i=0;
- // 用于在 EEPROM 中储存 double 类型数据的共用体
- unsigned char *dpointer;
- union data {
- double v;
- unsigned char dchar[8];
- } dvalue;
- void setup() {
- Serial.begin(9600);
- for(i = 0; i < 8; i++) dvalue.dchar[i] = EEPROM.read(i); // 从 EEPROM 读取偏移量
- hx.set_offset(dvalue.v); // 设置已读取的偏移量
- }
- void loop() {
- if(digitalRead(4) == LOW) {
- dvalue.v = hx.tare(); // 去皮重并读取偏移量
- hx.set_offset(dvalue.v); // 设置已读取的偏移量
- dpointer = dvalue.dchar; // 以下程序将偏移量分解并储存到 EEPROM
- for(i = 0; i < 8; i++) {
- EEPROM.write(i,*dpointer);
- dpointer++;
- }
- }
- double sum = 0;
- for (i = 0; i < 10; i++) {
- sum += hx.bias_read();
- }
- Serial.println(sum/10);
- //Serial.println(sum / 10 * (1 + (20 - temprature) / 10 * 0.02)); // 带线性温度补偿的输出,注意temprature单位为摄氏度。
- }
============================我分割线又回来啦=============================
此外,程序可以增加的功能还有:
1.LCD显示
2.键盘输入及语音功能
3.标准砝码校准功能(如500g),其实就是修正系数的自我修正功能。
这几个功能我就不再研究了,都不难,留给各位自己发挥的空间吧
全文完
基于24位AD转换模块HX711的重量称量实验(已补充皮重存储,线性温度漂移修正)的更多相关文章
- 树莓派进阶之路 (020) - 基于24位AD转换模块HX711的重量称量实验
参考文档:http://www.geek-workshop.com/thread-2315-1-1.html 参考文档:https://wenku.baidu.com/view/e5d5e4e2652 ...
- Android系统移植与调试之------->如何使用PhotoShop转换24位的bmp图片为16位bmp图片
使用Android移植时候,很多图片都需要16为的bmp格式,所以研究了一下如何从24位转换成16位,供大家参阅 step1:查看bmp图片的属性,如下图所示,是24位的 step2:用PhotoSh ...
- 生成24位字符串ID__IdGenerator.java
此工具类用于生成24位字符串ID,唯一不重复.直接通过 IdGenerator.get() 获取. 源码如下:(点击下载源码 - IdGenerator.java ) import java.net. ...
- 为什么24位位图(真彩色)的biSizeImage不等于(biWidth*biBitCount+31)/32*4*biHeight?
规定的,规定BMP文件的像素数据是按行存储的,而且每行的字节数必须为4的倍数,如果实际的像素数据不是4的倍数咋办?这就需要字节对齐,对齐是在一行的末尾添0以补足一行的字节数为4的倍数, ( biWid ...
- 24位和8位BMP图片保存纯C代码
BMP图片大家都知道,可以通过查看BMP图片结构使用纯C就可以打开,编辑,处理,保存图片.非常方便使用. 具体BMP结构可以参考:wingdi.h头文件.今天主要在进行删减代码,需要把多余的代码删除, ...
- 图像转置的SSE优化(支持8位、24位、32位),提速4-6倍。
一.前言 转置操作在很多算法上都有着广泛的应用,在数学上矩阵转置更有着特殊的意义.而在图像处理上,如果说图像数据本身的转置,除了显示外,本身并无特殊含义,但是在某些情况下,确能有效的提高算法效率,比如 ...
- FPGA设计千兆以太网MAC(3)——数据缓存及位宽转换模块设计与验证
本文设计思想采用明德扬至简设计法.上一篇博文中定制了自定义MAC IP的结构,在用户侧需要位宽转换及数据缓存.本文以TX方向为例,设计并验证发送缓存模块.这里定义该模块可缓存4个最大长度数据包,用户根 ...
- SSE图像算法优化系列四:图像转置的SSE优化(支持8位、24位、32位),提速4-6倍
一.前言 转置操作在很多算法上都有着广泛的应用,在数学上矩阵转置更有着特殊的意义.而在图像处理上,如果说图像数据本身的转置,除了显示外,本身并无特殊含义,但是在某些情况下,确能有效的提高算法效率,比如 ...
- 颜色模式中8位,16位,24位,32位色彩是什么意思?会有什么区别?计算机颜色格式( 8位 16位 24位 32位色)<转>
颜色模式中8位,16位,24位,32位色彩是什么意思?会有什么区别简单地说这里说的位数和windows系统显示器设置中的颜色位数是一样的.表示的是能够显示出来的颜色的多少. 8位的意思是说,能够显示出 ...
随机推荐
- c#:winform从一个toolstriptool上拖动一个图标到一个自定义usercontrol内。
效果: 在一个winform工程中,添加一个ToolStrip然后给它添加一个ToolStripButton(tsbStart,它就是红色框圈选的图标) this.toolStripTools = n ...
- (转) Unity3D 使用Texturepacker打包工具制作NGUI(Atlas)图集
转自:http://www.unitymanual.com/thread-37485-1-1.html 由于NGUI AtlasMaker对打包的优化不好,容易打出很大的图集,很多部分都是浪费的,所有 ...
- Effective JavaScript Item 63 注意异步调用中可能会被忽略的异常
异常处理是异步编程的一个难点. 在同步的代码中,异常可以非常easy地通过try catch语句来完毕: try { f(); g(); h(); } catch (e) { // handle an ...
- CSS中的图片路径问题
CSS中的背景图片写了相对路径,为什么不显示那? [解决方法] CSS中的背景图片路径应该写成相对于当前CSS文件的路径,而不是针对网站根目录的相对路径.
- iOS开发技巧 - 使用UISlider来调整值的范围
(Swift) import UIKit class ViewController: UIViewController { var slider: UISlider! func sliderValue ...
- asp.net使用include包含文件
么?用asp.net使用include包含文件?……有必要吗?使用“用户控件”不是更好吗? 当然,绝大多数情况下,用户控件都能解决问题.但若要在用户控件中需包含其他公用块,即使用用户控件嵌套,老是出问 ...
- LintCode: Fizz Buzz
C++ class Solution { public: /** * param n: As description. * return: A list of strings. */ vector&l ...
- [转]基本Guava工具
转自:http://www.cnblogs.com/renchunxiao/p/3661918.html?utm_source=tuicool 使用Joiner类 将任意字符串通过分隔符进行连接到一起 ...
- LIST OF NOSQL DATABASES [currently 150]
http://nosql-database.org Core NoSQL Systems: [Mostly originated out of a Web 2.0 need] Wide Column ...
- CDB和PDB的创建、连接、启动、关闭
一.CDB和PDB基本管理 基本概念: Multitenant Environment:多租户环境 CDB(Container Database):数据库容器 PD(Pluggable Databas ...