Space Ant(极角排序)
Space Ant
http://poj.org/problem?id=1696
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 5371 | Accepted: 3343 |
Description
- It can not turn right due to its special body structure.
- It leaves a red path while walking.
- It hates to pass over a previously red colored path, and never does that.
The pictures transmitted by the Discovery space ship depicts that plants in the Y1999 grow in special points on the planet. Analysis of several thousands of the pictures have resulted in discovering a magic coordinate system governing the grow points of the plants. In this coordinate system with x and y axes, no two plants share the same x or y.
An M11 needs to eat exactly one plant in each day to stay alive. When it eats one plant, it remains there for the rest of the day with no move. Next day, it looks for another plant to go there and eat it. If it can not reach any other plant it dies by the end of the day. Notice that it can reach a plant in any distance.
The problem is to find a path for an M11 to let it live longest.
Input is a set of (x, y) coordinates of plants. Suppose A with the coordinates (xA, yA) is the plant with the least y-coordinate. M11 starts from point (0,yA) heading towards plant A. Notice that the solution path should not cross itself and all of the turns should be counter-clockwise. Also note that the solution may visit more than two plants located on a same straight line. 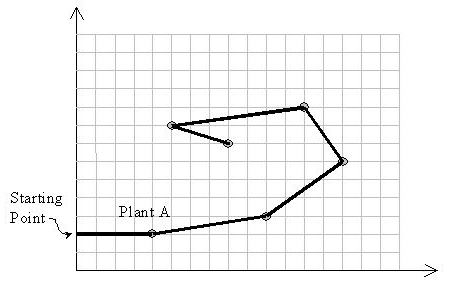
Input
Output
Sample Input
2
10
1 4 5
2 9 8
3 5 9
4 1 7
5 3 2
6 6 3
7 10 10
8 8 1
9 2 4
10 7 6
14
1 6 11
2 11 9
3 8 7
4 12 8
5 9 20
6 3 2
7 1 6
8 2 13
9 15 1
10 14 17
11 13 19
12 5 18
13 7 3
14 10 16
Sample Output
10 8 7 3 4 9 5 6 2 1 10
14 9 10 11 5 12 8 7 6 13 4 14 1 3 2
找到最左下的点,然后对极角排序即可
#include<cstdio>
#include<iostream>
#include<vector>
#include<cstring>
#include<algorithm>
#include<cmath>
using namespace std;
const double eps=1e-;
const double INF=1e20;
const double PI=acos(-1.0);
const int maxp=;
int sgn(double x){
if(fabs(x)<eps) return ;
if(x<) return -;
else return ;
}
inline double sqr(double x){return x*x;}
struct Point{
int pos;
double x,y;
Point(){}
Point(double _x,double _y){
x=_x;
y=_y;
}
void input(){
scanf("%lf %lf",&x,&y);
}
void output(){
printf("%.2f %.2f\n",x,y);
}
bool operator == (const Point &b)const{
return sgn(x-b.x) == && sgn(y-b.y)== ;
}
bool operator < (const Point &b)const{
return sgn(x-b.x)==?sgn(y-b.y)<:x<b.x;
}
Point operator - (const Point &b)const{
return Point(x-b.x,y-b.y);
}
//叉积
double operator ^ (const Point &b)const{
return x*b.y-y*b.x;
}
//点积
double operator * (const Point &b)const{
return x*b.x+y*b.y;
}
//返回长度
double len(){
return hypot(x,y);
}
//返回长度的平方
double len2(){
return x*x+y*y;
}
//返回两点的距离
double distance(Point p){
return hypot(x-p.x,y-p.y);
}
Point operator + (const Point &b)const{
return Point(x+b.x,y+b.y);
}
Point operator * (const double &k)const{
return Point(x*k,y*k);
}
Point operator / (const double &k)const{
return Point(x/k,y/k);
} //计算pa和pb的夹角
//就是求这个点看a,b所成的夹角
///LightOJ1202
double rad(Point a,Point b){
Point p=*this;
return fabs(atan2(fabs((a-p)^(b-p)),(a-p)*(b-p)));
}
//化为长度为r的向量
Point trunc(double r){
double l=len();
if(!sgn(l)) return *this;
r/=l;
return Point(x*r,y*r);
}
//逆时针转90度
Point rotleft(){
return Point(-y,x);
}
//顺时针转90度
Point rotright(){
return Point(y,-x);
}
//绕着p点逆时针旋转angle
Point rotate(Point p,double angle){
Point v=(*this) -p;
double c=cos(angle),s=sin(angle);
return Point(p.x+v.x*c-v.y*s,p.y+v.x*s+v.y*c);
}
}; struct Line{
Point s,e;
Line(){}
Line(Point _s,Point _e){
s=_s;
e=_e;
}
bool operator==(Line v){
return (s==v.s)&&(e==v.e);
}
//根据一个点和倾斜角angle确定直线,0<=angle<pi
Line(Point p,double angle){
s=p;
if(sgn(angle-PI/)==){
e=(s+Point(,));
}
else{
e=(s+Point(,tan(angle)));
}
}
//ax+by+c=0;
Line(double a,double b,double c){
if(sgn(a)==){
s=Point(,-c/b);
e=Point(,-c/b);
}
else if(sgn(b)==){
s=Point(-c/a,);
e=Point(-c/a,);
}
else{
s=Point(,-c/b);
e=Point(,(-c-a)/b);
}
}
void input(){
s.input();
e.input();
}
void adjust(){
if(e<s) swap(s,e);
}
//求线段长度
double length(){
return s.distance(e);
}
//返回直线倾斜角 0<=angle<pi
double angle(){
double k=atan2(e.y-s.y,e.x-s.x);
if(sgn(k)<) k+=PI;
if(sgn(k-PI)==) k-=PI;
return k;
}
//点和直线的关系
//1 在左侧
//2 在右侧
//3 在直线上
int relation(Point p){
int c=sgn((p-s)^(e-s));
if(c<) return ;
else if(c>) return ;
else return ;
}
//点在线段上的判断
bool pointonseg(Point p){
return sgn((p-s)^(e-s))==&&sgn((p-s)*(p-e))<=;
}
//两向量平行(对应直线平行或重合)
bool parallel(Line v){
return sgn((e-s)^(v.e-v.s))==;
}
//两线段相交判断
//2 规范相交
//1 非规范相交
//0 不相交
int segcrossseg(Line v){
int d1=sgn((e-s)^(v.s-s));
int d2=sgn((e-s)^(v.e-s));
int d3=sgn((v.e-v.s)^(s-v.s));
int d4=sgn((v.e-v.s)^(e-v.s));
if((d1^d2)==-&&(d3^d4)==-) return ;
return (d1==&&sgn((v.s-s)*(v.s-e))<=||
d2==&&sgn((v.e-s)*(v.e-e))<=||
d3==&&sgn((s-v.s)*(s-v.e))<=||
d4==&&sgn((e-v.s)*(e-v.e))<=);
}
//直线和线段相交判断
//-*this line -v seg
//2 规范相交
//1 非规范相交
//0 不相交
int linecrossseg(Line v){
int d1=sgn((e-s)^(v.s-s));
int d2=sgn((e-s)^(v.e-s));
if((d1^d2)==-) return ;
return (d1==||d2==);
}
//两直线关系
//0 平行
//1 重合
//2 相交
int linecrossline(Line v){
if((*this).parallel(v))
return v.relation(s)==;
return ;
}
//求两直线的交点
//要保证两直线不平行或重合
Point crosspoint(Line v){
double a1=(v.e-v.s)^(s-v.s);
double a2=(v.e-v.s)^(e-v.s);
return Point((s.x*a2-e.x*a1)/(a2-a1),(s.y*a2-e.y*a1)/(a2-a1));
}
//点到直线的距离
double dispointtoline(Point p){
return fabs((p-s)^(e-s))/length();
}
//点到线段的距离
double dispointtoseg(Point p){
if(sgn((p-s)*(e-s))<||sgn((p-e)*(s-e))<)
return min(p.distance(s),p.distance(e));
return dispointtoline(p);
}
//返回线段到线段的距离
//前提是两线段不相交,相交距离就是0了
double dissegtoseg(Line v){
return min(min(dispointtoseg(v.s),dispointtoseg(v.e)),min(v.dispointtoseg(s),v.dispointtoseg(e)));
}
//返回点P在直线上的投影
Point lineprog(Point p){
return s+(((e-s)*((e-s)*(p-s)))/((e-s).len2()));
}
//返回点P关于直线的对称点
Point symmetrypoint(Point p){
Point q=lineprog(p);
return Point(*q.x-p.x,*q.y-p.y);
}
}; Line L[];
int book[];
int n; bool Check(Line a,Line b){
if(sgn((a.s-a.e)^(b.s-a.e))*sgn((a.s-a.e)^(b.e-a.e))>) return false;
if(sgn((b.s-b.e)^(a.s-b.e))*sgn((b.s-b.e)^(a.e-b.e))>) return false;
if(sgn(max(a.s.x,a.e.x)-min(b.s.x,b.e.x))>=&&sgn(max(b.s.x,b.e.x)-min(a.s.x,a.e.x))>=
&&sgn(max(a.s.y,a.e.y)-min(b.s.y,b.e.y))>=&&sgn(max(b.s.y,b.e.y)-min(a.s.y,a.e.y))>=)
return true;
else return false;
} Point p[];
int pos; double dist(Point a,Point b){
return (b-a)*(b-a);
} bool cmp(Point a,Point b){
double tmp=(a-p[pos])^(b-p[pos]);
if(sgn(tmp)>){
return true;
}
else if(sgn(tmp)<){
return false;
}
else return dist(p[pos],a)<dist(p[pos],b);
} int main(){
int T;
std::ios::sync_with_stdio(false);
cin>>T;
while(T--){
int n;
cin>>n;
pos=;
for(int i=;i<=n;i++){
cin>>p[i].pos>>p[i].x>>p[i].y;
}
Point tmp=p[];
int pp=;
for(int i=;i<=n;i++){
if((p[i].y<tmp.y)||(p[i].y==tmp.y&&p[i].x<tmp.x)){
tmp=p[i];
pp=i;
}
}
swap(p[pp],p[]);
vector<int>ve;
ve.push_back(p[].pos);
for(int i=;i<n;i++){
sort(p+pos,p+n+,cmp);
pos++;
ve.push_back(p[pos].pos);
}
cout<<n;
for(int i=;i<ve.size();i++){
cout<<" "<<ve[i];
}
cout<<endl;
}
return ;
}
Space Ant(极角排序)的更多相关文章
- poj 1696 Space Ant 极角排序
#include<cstdio> #include<cstring> #include<cmath> #include<iostream> #inclu ...
- POJ 1696 Space Ant 极角排序(叉积的应用)
题目大意:给出n个点的编号和坐标,按逆时针方向连接着n个点,按连接的先后顺序输出每个点的编号. 题目思路:Cross(a,b)表示a,b的叉积,若小于0:a在b的逆时针方向,若大于0a在b的顺时针方向 ...
- Space Ant--poj1696(极角排序)
http://poj.org/problem?id=1696 极角排序是就是字面上的意思 按照极角排序 题目大意:平面上有n个点然后有一只蚂蚁他只能沿着点向左走 求最多能做多少点 分析: 其实 ...
- poj 1696 Space Ant (极角排序)
链接:http://poj.org/problem?id=1696 Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissi ...
- POJ 1696 Space Ant(极角排序)
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 2489 Accepted: 1567 Descrip ...
- poj 1696:Space Ant(计算几何,凸包变种,极角排序)
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 2876 Accepted: 1839 Descrip ...
- POJ 1696 Space Ant 【极角排序】
题意:平面上有n个点,一只蚂蚁从最左下角的点出发,只能往逆时针方向走,走过的路线不能交叉,问最多能经过多少个点. 思路:每次都尽量往最外边走,每选取一个点后对剩余的点进行极角排序.(n个点必定能走完, ...
- Space Ant---poj1696(极角排序)
题目链接:http://poj.org/problem?id=1696 题意:给你n个点,然后我们用一条线把它们连起来,形成螺旋状: 首先找到左下方的一个点作为起点,然后以它为原点进行极角排序,找到极 ...
- poj 1696 极角排序求最长逆时针螺旋线
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 4970 Accepted: 3100 Descrip ...
随机推荐
- appium 3-31603调试分析方法
1.Appium Log 清晰记录了所有的请求和结果 @Test public void testDebug() throws InterruptedException,IOException{ Mo ...
- golang web框架 beego 学习 (一) 环境搭建
下面的命令我都是在$GOPATH的路径下执行的: 1. 首先下载beego框架: go get github.com/astaxie/beego (注意:运行上面命令时没有反应,需要在etc/host ...
- 解决“Can't bind to local 8630 for debugger”错误--查杀多余进程
Can't bind to local 8630 for debugger 表明本地8630端口被占用 1.Windows平台 在windows命令行窗口下执行: 1.查看所有的端口占用情况 C:\& ...
- 小朋友学Python(2)
本节学习python的第一个程序:输出“Hello World!”.咱们用两种方法实现 方法(一) 进入python环境,直接使用print方法 hello world.png 方法(二) 先编程 ...
- redis实现分布式锁 转自importnew 记录一下
前言 分布式锁一般有三种实现方式:1. 数据库乐观锁:2. 基于Redis的分布式锁:3. 基于ZooKeeper的分布式锁.本篇博客将介绍第二种方式,基于Redis实现分布式锁.虽然网上已经有各种介 ...
- uva-10054-欧拉回路
题意:一个项链上面的每一个珠子有俩种颜色,前面一个珠子后面的颜色和后面珠子的前面颜色一样,有一天它断了, 一个人去搜集,问,搜集到的珠子能不能再次串成项链 原以为是链表,原来链表这组数据过不了. 71 ...
- 最近开始研究php的缓存技术,来个系统自带的OPcache
最近开始研究php的缓存技术,来个系统自带的OPcache php5.5以上版本 系统自带 PHP5.2-5.4 可通过扩展来安装 OPcache是 zend出品 比apc的优势在于 长期更新 ...
- 35. CentOS-6.3安装Mysql-5.5.29
安装方式分为rpm和源码编译安装两种,本文是采用mysql源码编译方式,编译器使用Cmake.软件需要mysql-5.5.29.tar.gz和cmake-2.8.10.2.tar.gz,请自行下载.下 ...
- Python selenium的js扩展实现
python写的数据采集,对一般有规律的页面用 urllib2 + BeautifulSoup + 正则就可以搞定. 但是有些页面的内容是通过js生成,或者通过js跳转的,甚至js中还加入几道混淆机制 ...
- VisualSVN: 只能修改自己提交日志
上回讲过怎么修改日志信息,这次想提交怎么只能修改自己提交的. 现在演示用户111来修改libra的日志信息 这个公正的SVN出现了 用户111说小样,不让我改,那我修改自己提交的日志总行了吧!! 我改 ...