webots自学笔记(四)传感器API使用、查看官方文档
原创文章,来自“博客园,_阿龙clliu” http://www.cnblogs.com/clliu/,转载请注明原文章出处。
不能说webots的学习资料少,只能说它的中文资料少。但是英文资料也的看呀,毕竟要深入了解这款软件,看官方的帮助文档是最好不过的了。
官方参考文档地址https://www.cyberbotics.com/doc/reference/index,其实也是可以离线查看的,但是离线是英文,本人的英文水平也不咋地,所以就投机取巧了,浏览器是有在线翻译的功能的。

既然说的是传感器的API使用,那就选惯性测量单元 (IMU)吧,在节点和API函数下选择(惯性单元 )InertialUnit,就出现了关于这个传感器的描述和使用方法。

在webots中有许多传感器,包括GPS、Gyro(陀螺仪)、touchSensor(接触传感器)、Receiver(接收器)、Pen(笔)、Emitter(发射器)、Compass(指南针)、DistanceSensor(距离传感器)、Camane(照相机)等等。
----------------------------------------------以下部分来自webots官方reference------------------------------------
Webots参考手册
惯性单位
派生自设备。
InertialUnit {
MFVec3f lookupTable [ ] # interpolation
SFBool xAxis TRUE # compute roll
SFBool zAxis TRUE # compute pitch
SFBool yAxis TRUE # compute yaw
SFFloat resolution -1
}
描述
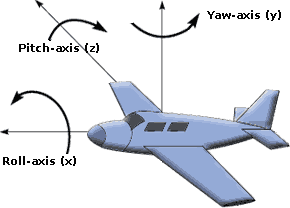
该InertialUnit节点模拟一个惯性测量单元 (IMU)。的InertialUnit计算并返回它的辊, 俯仰和偏航相角在限定的全局坐标系和WorldInfo节点。如果要测量加速度或角速度,请改用加速度计或 陀螺仪节点。该InertialUnit节点必须被放置在机器人使得其点¯x在方向a轴分机器人的向前运动(纵轴)。 正z轴必须指向机器人的右侧,例如右臂,右翼(横向轴)。正y轴必须指向 机器人的上/上方向。如果惯性单元具有该取向,则滚动,俯仰和偏航角对应于通常的汽车,航空或空间意义。更精确地, 惯性单元测量沿x轴(滚动),z轴(俯仰)和y轴(偏航)的Tait-Bryan角。这个惯例通常称为xzy外部序列; 它对应于由YZX表示的元素旋转的组成。参考框架由给出北方向的单位向量,与归一化重力向量和它们的叉积(cross-product)相反的单位向量组成(参见WorldInfo以定制该框架)。
注意:在万向节锁定情况下,即当俯仰为-π/ 2或π/ 2时,侧倾和偏航设置为NaN(不是数字)。
字段摘要
lookupTable:该字段可选地指定查找表,其可以用于将角度值[rad]改变为设备特定输出值,或者例如将单位改变为度数。使用查找表,还可以定义最小和最大输出值,并将噪声添加到输出值。默认情况下,查找表为空,因此返回的角度值以弧度表示,不添加噪声。xAxis, yAxis, zAxis:每个布尔字段指定是否应为指定轴启用或禁用计算。该xAxis字段定义是否应计算滚转角。该yAxis字段定义是否应该计算偏航角。该zAxis字段定义是否 应该计算俯仰角。如果这些字段之一设置为FALSE,则不会计算相应的角度元素,并且它将返回NaN (不是数字)。例如,如果zAxis为FALSE,则wb_inertial_unit_get_values()[2]返回NaN。默认值是所有三个轴都被启用(TRUE)。
resolution:此字段允许定义传感器的分辨率,分辨率是其能够测量的最小变化。将此字段设置为-1(默认)意味着传感器具有“无限”分辨率(可以测量任何无限小的变化)。此字段接受间隔(0.0,inf)中的任何值。
惯性单位函数
名称
wb_inertial_unit_enable,wb_inertial_unit_disable,wb_inertial_unit_get_sampling_period,wb_inertial_unit_get_roll_pitch_yaw - 启用,禁用和读取惯性单元的输出值
{ C ++ },{ Java },{ Python },{ Matlab },{ ROS }
#include <webots/inertial_unit.h> void wb_inertial_unit_enable(WbDeviceTag tag, int sampling_period);
void wb_inertial_unit_disable(WbDeviceTag tag);
int wb_inertial_unit_get_sampling_period(WbDeviceTag tag);
const double *wb_inertial_unit_get_roll_pitch_yaw(WbDeviceTag tag);
描述
该wb_inertial_unit_enable()功能打开角度测量。该sampling_period参数指定传感器的采样周期并以毫秒表示。注意,第一次测量仅在第一个采样周期过去后才可用。
该wb_inertial_unit_disable()函数关闭 InertialUnit设备。
该wb_inertial_unit_get_sampling_period()函数返回给定的周期wb_inertial_unit_enable(),如果设备被禁用,则返回0。
该wb_inertial_unit_get_roll_pitch_yaw()函数返回InertialUnit的当前滚动, 俯仰和偏航角。值作为3个组件的数组返回,因此只有索引0,1和2对访问返回的数组有效。注意,索引0,1和2分别返回滚转,俯仰和偏航角。
的辊角度指示单元的旋转角度绕其点¯x轴,在间隔[-π,π]。的滚角为零时 InertialUnit是水平的,即,当其ÿ轴具有重力相反的方向(和WorldInfo定义 gravity向量)。
该桨距角表示本装置的旋转角度大约是ž轴,在间隔[-π/ 2,π/ 2]。该桨距角为零时 InertialUnit是水平的,即,当其ÿ轴具有重力的方向相反。如果惯性单元以标准方向放置在机器人上,则 当机器人向下时,俯仰角为负,当机器人向上时,俯仰角为正。
的偏航角指示单元取向,在间隔[-π,π],相对于和WorldInfo。northDirection。在偏航角为零时InertialUnit的点¯x轴与正北方向对齐,它为π时的零件是向东/ 2,和-π/ 2时的单元被向西定向。的偏航角可以用作一个罗盘。
注意 [C,C ++]:返回的向量是指向由Webots管理的内部值的指针,因此释放此指针是非法的。此外,请注意,指向的值只有在下一次调用
wb_robot_step()或 时才有效Robot::step()。如果这些值需要较长时间,则必须复制它们。
注意 [Python]:
getRollPitchYaw()以包含三个浮点的列表的形式返回角度。
webots自学笔记(四)传感器API使用、查看官方文档的更多相关文章
- 转:ArcGIS API For JavaScript官方文档(二十)之图形和要素图层——①Graphics概述
原文地址:ArcGIS API For JavaScript官方文档(二十)之图形和要素图层——①Graphics概述 ArcGIS JavaScript API允许在地图上绘制graphic(图形) ...
- 巩固复习(Django最基础的部分_具体查看官方文档)
Django学习路1 1.脚本不能随便运行,没准 linux 运行完就上不去了 2.pip 在 linux 上 写 pip3 同理 python 写为 python3 3.在 pycharm 上安装库 ...
- 流媒体技术学习笔记之(六)FFmpeg官方文档先进音频编码(AAC)
先进音频编码(AAC)的后继格式到MP3,和以MPEG-4部分3(ISO / IEC 14496-3)被定义.它通常用于MP4容器格式; 对于音乐,通常使用.m4a扩展名.第二最常见的用途是在MKV( ...
- OpenGL ES着色器语言之变量和数据类型(一)(官方文档第四章)和varying,uniform,attribute修饰范围
OpenGL ES着色器语言之变量和数据类型(一)(官方文档第四章) 所有变量和函数在使用前必须声明.变量和函数名是标识符. 没有默认类型,所有变量和函数声明必须包含一个声明类型以及可选的修饰符. ...
- pm2 官方文档 学习笔记
一.安装 1.安装 npm install pm2 -g 2.更新 npm install pm2 -g && pm2 update pm2 update 是为了刷新 PM2 的守护进 ...
- vue.js 2.0 官方文档学习笔记 —— 01. vue 介绍
这是我的vue.js 2.0的学习笔记,采取了将官方文档中的代码集中到一个文件的形式.目的是保存下来,方便自己查阅. !官方文档:https://cn.vuejs.org/v2/guide/ 01. ...
- Spring Framework 官方文档学习(四)之Validation、Data Binding、Type Conversion(一)
题外话:本篇是对之前那篇的重排版.并拆分成两篇,免得没了看的兴趣. 前言 在Spring Framework官方文档中,这三者是放到一起讲的,但没有解释为什么放到一起.大概是默认了读者都是有相关经验的 ...
- Spring Framework 官方文档学习(四)之Validation、Data Binding、Type Conversion(二)
接前一篇 Spring Framework 官方文档学习(四)之Validation.Data Binding.Type Conversion(一) 本篇主要内容:Spring Type Conver ...
- Spring Framework 官方文档学习(四)之Validation、Data Binding、Type Conversion
本篇太乱,请移步: Spring Framework 官方文档学习(四)之Validation.Data Binding.Type Conversion(一) 写了删删了写,反复几次,对自己的描述很不 ...
随机推荐
- Ninja介绍
什么是Ninja 在Unix/Linux下通常使用Makefile来控制代码的编译,但是Makefile对于比较大的项目有时候会比较慢,看看上面那副漫画,代码在编译都变成了程序员放松的借口了.所以这个 ...
- 转:Oracle弃用sun.reflect.Reflection.getCallerClass
http://www.infoq.com/cn/news/2013/07/Oracle-Removes-getCallerClass 作为Java开发者,我们经常忽略@Deprecated注释,继续使 ...
- 实现jul 日志重定向到 slf4j
需求背景 jul 指的是java.util.logging,是 java 内置的日志模块,目前流行的Java日志组件还包括 jcl(common-logging).slf4j/log4j/logbac ...
- ubuntu 压缩软件
7-zip 安装: sudo apt-get install p7zip-full 使用方法: 7z x file file是你要解压的文件名 更多使用方法: man 7z rar sudo apt- ...
- Array数组常用的5个方法
es6 时代来临了,不知道es5 你熟知了吗? 在此介绍一个我常用到的5个方法,万恶的ie9一下并不支持,需要做兼容慎用 indexOf indexOf()方法返回在该数组中第一个找到的元素位置,如果 ...
- 持久层框架之MyBatis
1.mybatis框架介绍: MyBatis 本是apache的一个开源项目iBatis, 2010年这个项目由apache software foundation 迁移到了google code,并 ...
- PHP反射之类的反射
最近在琢磨如何用PHP实现站点的插件功能,需要用到反射,于是现学了一下,笔记如下: class Person { public $name = 'Lily'; public $gender = 'ma ...
- hibernate与mybatis的区别
我是一名java开发人员,hibernate以及mybatis都有过学习,在java面试中也被提及问道过,在项目实践中也应用过,现在对hibernate和mybatis做一下对比,便于大家更好的理解和 ...
- 升级到appcompat v7 21.0.2之后遇到的问题解决方法
1)一开始是手动直接覆盖文件到对应的lib project下,提示数个style找不到.原因是新旧版本的文件命名和结构不同,所以这个问题只需要把project目录清空,重新复制文件即可解决. 2)发现 ...
- node-webkit制作桌面应用
心血来潮突然想用js尝试写桌面应用,突然发现我大js真的无所不能.在网上搜到了这么一个东东:node-webkit.用Node.js来进行系统资源的访问,用HTML+CSS完成页面的搭建.哇,一切突然 ...