机器学习进阶-图像梯度运算-Sobel算子 1. cv2.Sobel(使用Sobel算子进行计算) 2. cv2.convertScalerAbs(将像素点进行绝对值的计算)
1.cv2.Sobel(src, ddepth, dx, dy, ksize) 进行sobel算子计算
参数说明:src表示当前图片,ddepth表示图片深度,这里使用cv2.CV_64F使得结果可以是负值, dx表示x轴方向,dy表示y轴方向, ksize表示移动方框的大小
2.cv2.convertScalerAbs(src) 将像素点进行绝对值计算
参数说明: src表示当前图片
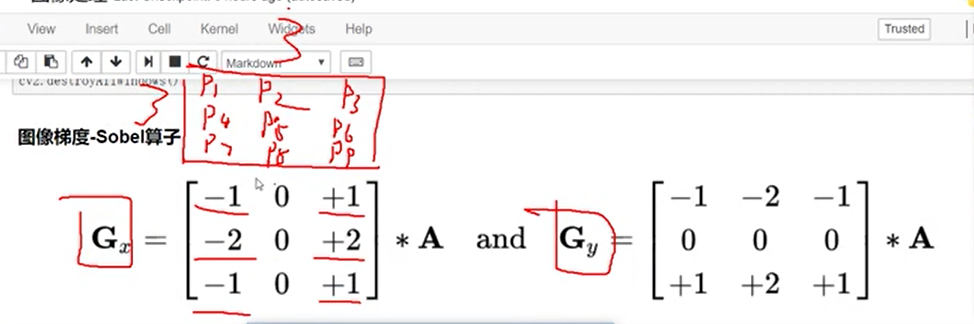
sobel算子:分为x轴方向和y轴方向上的,x轴方向上的算子如图中的Gx,将sober算子在图中进行平移,当前位置的像素值等于sobel算子与(当前位置与周边位置8个点)进行对应位置相乘并相加操作,作为当前位置的像素点,y轴方向的算子如Gy, 对于x轴方向上,即左右两边的比较,
计算方程为:x轴: p3 - p1 + 2 * p6 - 2 * p4 + p9 - p7, 右边的像素值减去左边的像素值
代码:
第一步:载入原始图片
第二步:使用cv2.Sobel(src, cv2.CV_64F, 1, 0, ksize=3) 对x轴方向进行sobel算子相乘操作
第三步:由于会出现负值的情况,因此使用cv2.convertScalerAbs() 转换为绝对值的形式
第四步:计算y轴方向上的sobel算子
第五步:使用cv2.addWeighted 将x轴方向的sobel算子的结果和y轴方向上的sobel算子的结果结合
第六步:使用cv2.Sobel(src, cv2.CV_64F, 1, 1, ksize=3) 直接获得x轴和y轴方向上的sobel算子结合
第七步:对这两个步骤获得的sobel算子作图
import cv2
import numpy as np # 第一步:加载图片
img = cv2.imread('pie.png')
cv2.imshow('original', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 第二步:对x轴方向上进行sobel算子相乘操作
x_sobel = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3)
cv2.imshow('x_sobel', x_sobel)
cv2.waitKey(0)
cv2.destroyAllWindows()
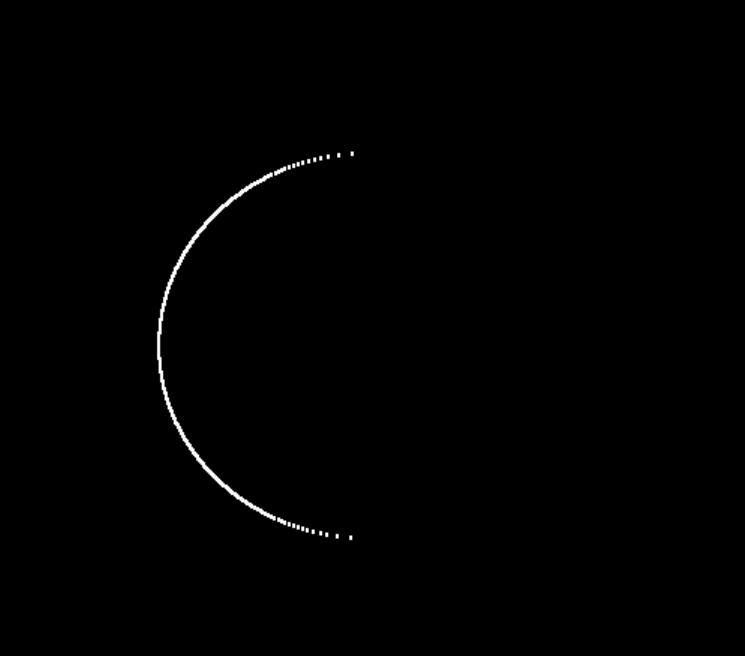 画图时的负值,使用0来进行表示,因此右侧是黑色的
画图时的负值,使用0来进行表示,因此右侧是黑色的
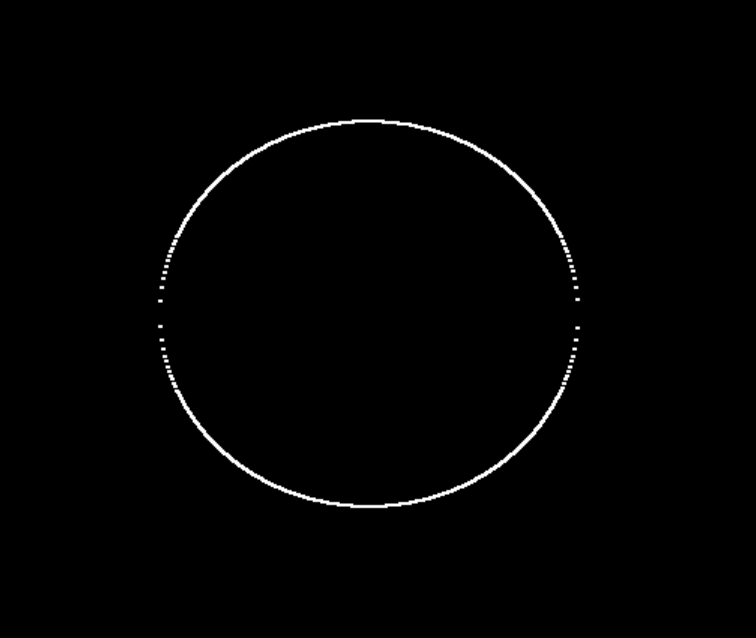
# 第三步:因为右侧像素减去左边像素,存在负值的情况,因此使用cv2.convertScaleAbs取绝对值操作
x_sobel = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3)
x_sobel = cv2.convertScaleAbs(x_sobel)
cv2.imshow('x_sobel', x_sobel)
cv2.waitKey(0)
cv2.destroyAllWindows()

# 第四步:计算y轴的sobel算子
y_sobel = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
y_sobel = cv2.convertScaleAbs(y_sobel)
cv2.imshow('y_sobel', y_sobel)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 第五步:并使用cv2.addweighted进行合并
xy_sobel = cv2.addWeighted(x_sobel, 0.5, y_sobel, 0.5, 0) # 第六步: 直接使用cv2.sobel 进行计算
xy_sobel_direct = cv2.Sobel(img, cv2.CV_64F, 1, 1, ksize=3) # 第七步:画图比较分步合并和一步到位的结果差异
cv2.imshow('imgs', np.hstack((xy_sobel, xy_sobel_direct)))
cv2.waitKey(0)
cv2.destroyAllWindows()
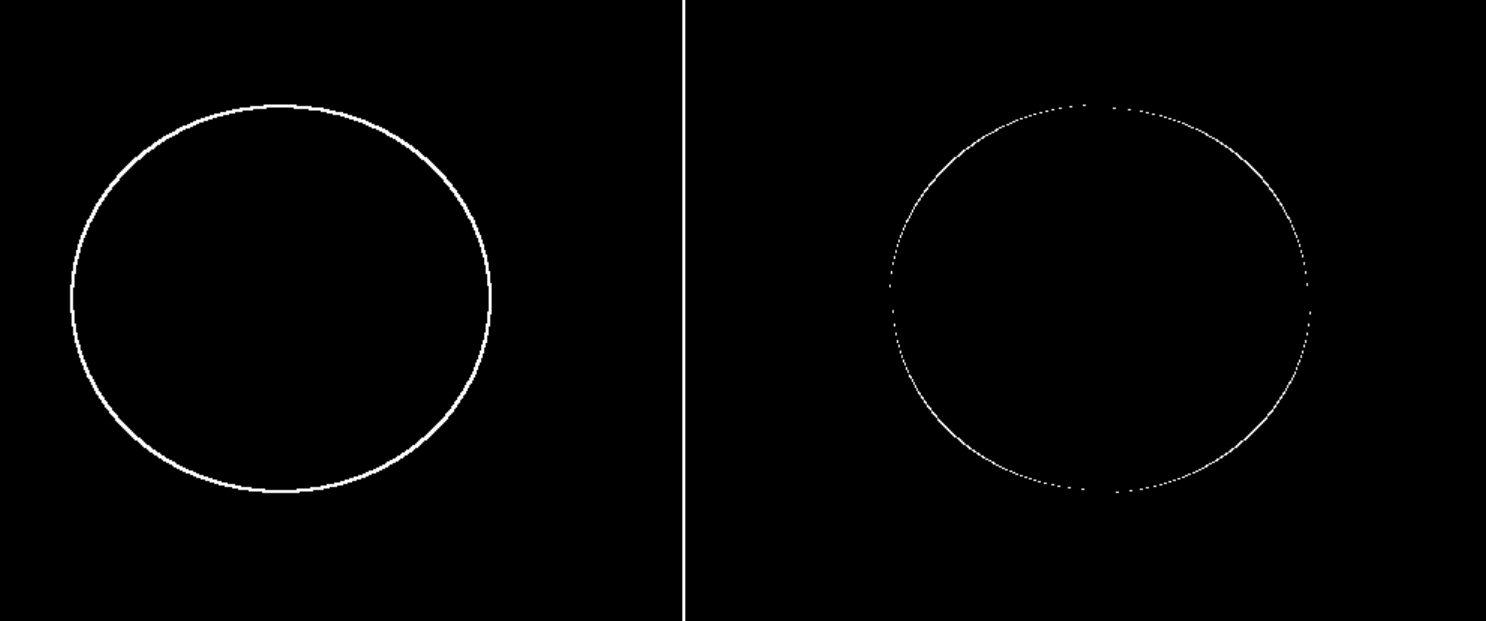 从图中我们可以看出x和y轴各自求,再做合并比直接求得的结果,轮廓更加的明显
从图中我们可以看出x和y轴各自求,再做合并比直接求得的结果,轮廓更加的明显
机器学习进阶-图像梯度运算-Sobel算子 1. cv2.Sobel(使用Sobel算子进行计算) 2. cv2.convertScalerAbs(将像素点进行绝对值的计算)的更多相关文章
- 机器学习进阶-图像梯度计算-scharr算子与laplacian算子(拉普拉斯) 1.cv2.Scharr(使用scharr算子进行计算) 2.cv2.laplician(使用拉普拉斯算子进行计算)
1. cv2.Scharr(src,ddepth, dx, dy), 使用Scharr算子进行计算 参数说明:src表示输入的图片,ddepth表示图片的深度,通常使用-1, 这里使用cv2.CV_6 ...
- 机器学习进阶-图像形态学操作-梯度运算 cv2.GRADIENT(梯度运算-膨胀图像-腐蚀后的图像)
1.op = cv2.GRADIENT 用于梯度运算-膨胀图像-腐蚀后的图像 梯度运算:表示的是将膨胀以后的图像 - 腐蚀后的图像,获得了最终的边缘轮廓 代码: 第一步:读取pie图片 第二步:进行腐 ...
- 机器学习进阶-图像金字塔与轮廓检测-模板匹配(单目标匹配和多目标匹配)1.cv2.matchTemplate(进行模板匹配) 2.cv2.minMaxLoc(找出矩阵最大值和最小值的位置(x,y)) 3.cv2.rectangle(在图像上画矩形)
1. cv2.matchTemplate(src, template, method) # 用于进行模板匹配 参数说明: src目标图像, template模板,method使用什么指标做模板的匹配 ...
- 机器学习进阶-图像金字塔与轮廓检测-轮廓检测 1.cv2.cvtColor(图像颜色转换) 2.cv2.findContours(找出图像的轮廓) 3.cv2.drawContours(画出图像轮廓) 4.cv2.contourArea(轮廓面积) 5.cv2.arcLength(轮廓周长) 6.cv2.aprroxPloyDP(获得轮廓近似) 7.cv2.boudingrect(外接圆)..
1. cv2.cvtcolor(img, cv2.COLOR_BGR2GRAY) # 将彩色图转换为灰度图 参数说明: img表示输入的图片, cv2.COLOR_BGR2GRAY表示颜色的变换形式 ...
- 机器学习进阶-图像金字塔与轮廓检测-图像金字塔-(**高斯金字塔) 1.cv2.pyrDown(对图片做向下采样) 2.cv2.pyrUp(对图片做向上采样)
1.cv2.pyrDown(src) 对图片做向下采样操作,通常也可以做模糊化处理 参数说明:src表示输入的图片 2.cv2.pyrUp(src) 对图片做向上采样操作 参数说明:src表示输入的 ...
- 机器学习进阶-图像形态学操作-膨胀操作 1.cv2.dilate(进行膨胀操作)
1.cv2.dilate(src, kernel, iteration) 参数说明: src表示输入的图片, kernel表示方框的大小, iteration表示迭代的次数 膨胀操作原理:存在一个ke ...
- 机器学习进阶-图像形态学操作-腐蚀操作 1.cv2.erode(进行腐蚀操作)
1.cv2.erode(src, kernel, iteration) 参数说明:src表示的是输入图片,kernel表示的是方框的大小,iteration表示迭代的次数 腐蚀操作原理:存在一个ker ...
- 机器学习进阶-图像基本操作-图像数据读取 1.cv2.imread(图片读入) 2.cv2.imshow(图片展示) 3.cv2.waitKey(图片停留的时间) 4.cv2.destroyAllWindows(清除所有的方框界面) 5.cv2.imwrite(对图片进行保存)
1. cv2.imread('cat.jpg', cv2.IMGREAD_GRAYSCALE) # 使用imread读入图像(BGR顺序), 使用IMGREAD_GRAYSCALE 使得读入的图片为 ...
- 机器学习进阶-图像形态学变化-礼帽与黑帽 1.cv2.TOPHAT(礼帽-原始图片-开运算后图片) 2.cv2.BLACKHAT(黑帽 闭运算-原始图片)
1.op = cv2.TOPHAT 礼帽:原始图片-开运算后的图片 2. op=cv2.BLACKHAT 黑帽: 闭运算后的图片-原始图片 礼帽:表示的是原始图像-开运算(先腐蚀再膨胀)以后的图像 ...
随机推荐
- 关于java前端入门的一些简单的看法
html:是网页的骨架,静态网页初步的轮廓,简单粗糙,僵硬又没有美感.表单的标签<form>,里面的<input>很常用,里面有type属性等css:为了更加灵活,常与div一 ...
- vue父子组件(1.0)
1.父子组件 在上一篇随笔中展示了vue的组件,当我们继续在组件中写组件,形成组件嵌套的时候,就是我们所说的父子组件了. <!DOCTYPE html> <html lang=&qu ...
- jquery add()方法
<html><meta charset="utf-8"><head><script type="text/javascript& ...
- 学习笔记之机器学习实战 (Machine Learning in Action)
机器学习实战 (豆瓣) https://book.douban.com/subject/24703171/ 机器学习是人工智能研究领域中一个极其重要的研究方向,在现今的大数据时代背景下,捕获数据并从中 ...
- [转]VB 读写ini 配置文件
转自 百度知道 C# 读写 ini配置文件 点此链接 'API 声明Public Declare Function GetPrivateProfileString Lib "kernel32 ...
- jQuery中的跨域问题
jQuery中的Ajax的跨域问题 jsonp跨域问题:回调函数中的字符串: cb或callback jsonpcallback:跟的是cb后面的函数,主要自己写: 数据中的函数fn(数据) 目前是这 ...
- js代码要不要加分号
最近写了点node的项目,习惯了go语言的后面不带分号,那么js的项目,要不要带分号呢 首先,我们来了解下javascript的自动填充规则 在说要不要写分号之前,先了解一下javascript自动填 ...
- github_源码
固定头部: hongyangAndroid/Android-StickyNavLayout:ListView 与ViewPager 滑动冲突处理,滑动到顶部固定位置停顿; ufo22940268/ ...
- [UE4]位与字节
位 1.bit,比特 2.一个位可以表示两个值,0或者1(一个位只能表示0或者1,并不是能同时表示0和1). 3.一个位为什么只能是2个值,而不能是3个值呢?这是由于技术因素造成的,在硬件中,如果用一 ...
- android websocket
https://github.com/TakahikoKawasaki/nv-websocket-client