ROS-by-example的安装
在这里我之前用的VM12安装成功之后,仿真器机器人会有问题,故把电脑做成双系统的形式来重新安装;
环境:Ubuntu14.04 LTS 32bits
ROS版本:ROS Indigo
在学习本部分之后的内容,请先学习 beginner_Tutorials 和 learning_tf 的ROS 相关教程。
下面是安装准备
1、在下载机器人程序包之前,我需要先安装一些必要的软件包。直接执行下面的命令进行安装:
(注意:如果你还没有使用 ROS 的国内镜像网站,请先配置相关文件。将 ROS 的下载网站设置为国内镜像网站。参考网站:http://blog.csdn.net/github_35160620/article/details/52337181,这里面有讲:如何设置软件源配置文件。)
sudo apt-get install -y ros-indigo-turtlebot-bringup \
ros-indigo-turtlebot-create-desktop ros-indigo-openni-* \
ros-indigo-openni2-* ros-indigo-freenect-* ros-indigo-usb-cam \
ros-indigo-laser-* ros-indigo-hokuyo-node \
ros-indigo-audio-common gstreamer0.10-pocketsphinx \
ros-indigo-pocketsphinx ros-indigo-slam-gmapping \
ros-indigo-joystick-drivers python-rosinstall \
ros-indigo-orocos-kdl ros-indigo-python-orocos-kdl \
python-setuptools ros-indigo-dynamixel-motor-* \
libopencv-dev python-opencv ros-indigo-vision-opencv \
ros-indigo-depthimage-to-laserscan ros-indigo-arbotix-* \
ros-indigo-turtlebot-teleop ros-indigo-move-base \
ros-indigo-map-server ros-indigo-fake-localization \
ros-indigo-amcl git subversion mercurial
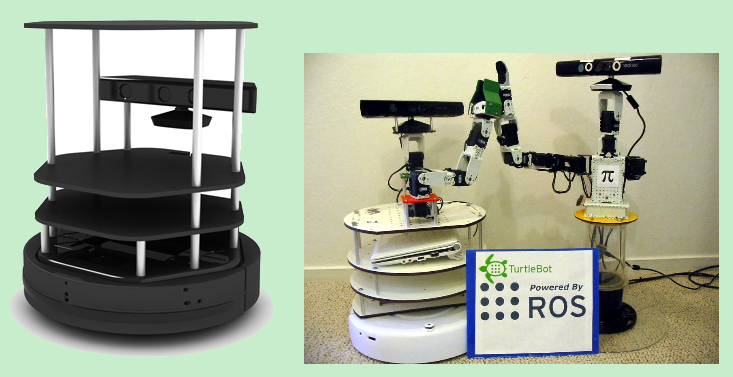
ros-by-example包 提供了2个测试用的模拟机器人:TurtleBot 和 Pi Robot
2、在必要软件安装好之后,下载rbx1.
$ cd ~/catkin_ws/src
$ git clone https://github.com/pirobot/rbx1.git
$ cd rbx1
$ git checkout indigo-devel
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
$ rospack profile
在ROS By Example包中都是以rbx1开头,使用如下命令
roscd rbx1
cd ..
ls -F
3、为了能在一个模拟的机器人上测试我们的代码,下面来安装模拟器
1)什么是rviz
rviz : The ROS Visualization Tool ,即机器人操作系统3D可视化工具。它的作用就是:一个虚拟世界,用来模拟机器人在现实世界的运行效果。简单的说它就是ROS的一个模拟器软件。
2)安装rviz
(如果在上面已经安装完成了rviz,那么你现在可以跳过:安装rviz)
新开一个终端,执行下面的命令:
$ sudo apt-get install ros-indigo-arbotix-*
$ rospack profile #更新一下ROS内部软件包
#rospack profile功能类似于使用sudo apt-get update更新Linux软件包一样。它的功能是:更新ros软件包
安装完成。
3)举例测试
开两个终端,来运行下面的命令。第1条命令执行后没有什么实际的效果,第2条打开 rviz 软件,你就可以看到效果。
(在第一个命令的时候,你可以运行 TurtleBot 机器人,也可以选择运行 Pi Robot 机器人。)
$ roslaunch rbx1_bringup fake_turtlebot.launch #或者 roslaunch rbx1_bringup fake_pi_robot.launch
$ rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz #注意:这条指令中的'`'是键盘左上角'Esc'键下面的那个键
命令执行完,会打开一个窗口: 这就是 Rviz 模拟器 :

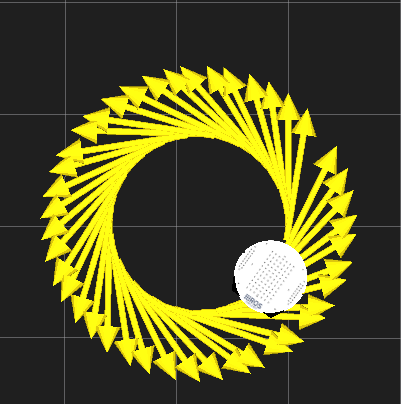
为了测试模拟,打开另一个终端并运行以下命令,这个命令会引起模拟机器人以逆时针圆周运动
$ rostopic pub /cmd_vel geometry_msgs/Twist -r '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
这条命令运行后的效果:就是让机器人做画圆运动:

注意: “ : ” 后面必须要加 空格。如果你不加空格,效果就是下面这个样子:
要停止转动,按下 Ctrl-C 在同一个终端窗口,或者发布空 Twist 消息:
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}'
4、例子讲解
运行的第一条命令: $ roslaunch rbx1_bringup fake_turtlebot.launch 是:启动一个 TurtleBot 机器人的模型。 如果你想使用 Pi Robot 模型,就不执行这条命令,执行:
$ roslaunch rbx1_bringup fake_pi_robot.launch 。 总之,你想启动哪个机器人模型,就执行对应的命令。
Turtlebot机器人 : ————————————————————————-Pi 机器人 :

5、为什么要使用rviz?
你不需要用一个实际的机器人开始ROS学习。ROS包含了许多在虚拟环境中运行的机器人包,所以你可以在拥有真实世界的机器人前,在虚拟环境中测试您的程序。
在ROS中有3个可以模拟机器人的模拟器软件:
- Gazebo
- Stage
- ArbotiX(就是RVIz)
你可以任选一个:
Gazebo:可以模拟出完整的现实世界,但是软件使用起来比较复杂。
Stage:简单的2D模拟器,可以管理多个机器人和各种传感器,比如激光传感器。
ArbotiX:它就是Rviz,它跟Gazebo软件比较,它不能模拟物理现象和没有传感器反馈。
在ROS提高篇教程,我们就使用rviz,因为它简单,并且我们目前不需要有物理现象在本教程。(在ROS教程实战篇中,我们将学习Gazebo,Gazebo软件对CPU的处理速度要求比较高)。
对应现在来说,我们知道这些就可以了。
ROS-by-example的安装的更多相关文章
- Ros使用Arduino 1安装Arduino IDE
安装Arsuino IDE sudo apt-get install arduino 设置库文件路径 在使用ROS的库文件时,必须在代码的开头包括: #include <ros.h> 接下 ...
- ROS indigo Ubuntu14.04 安装问题
错误信息:Unpacking ros-indigo-desktop-full (1.1.6-0trusty-20181006-135515-0800) ... Errors were encounte ...
- ROS indigo 删除和安装
删除比较容易: sudo apt-get remove ros-jade-desktop-full 但是如果怕删不干净可以采用: sudo apt-get remove ros-* ,但是不确定会 ...
- ROS:使用ubuntuKylin17.04安装ROS赤xi龟
使用ubuntuKylin17.04安装 参考了此篇文章:SLAM: Ubuntu16.04安装ROS-kinetic 重复官方链接的步骤也没有成功. 此后发现4.10的内核,不能使用Kinetic. ...
- ROS 八叉树地图构建 - 安装 octomap 和 octomap_server 建图包!
项目要用到八叉树库 Octomap 来构建地图,这里记录下安装.可视化,并启用带颜色的 Octomap 的过程. 一.Apt 安装 Octomap 库 如果你不需要修改源码,可以直接安装编译好的 oc ...
- 在树莓派4b上安装 ROS MELODIC 源码安装
按照以下步骤照做就可以了,很简单的,就是浪费一点点时间罢了.也可以退而求其次,买个树莓派3B+来玩,哈哈. Step 1: Install Dependecies and Download the P ...
- ROS 不能再详细的安装教程
版权声明:本文为博主原创文章,转载请标明出处: http://www.cnblogs.com/liu-fa/p/5779206.html 关于ROS(Robot OS 机器人操作系统),估计看这个博文 ...
- ubuntu14上安装ros教程
安装ROS 官方的安装教程地址 http://wiki.ros.org/cn/jade/Installation/Ubuntu 建议安装indigo版的 下面的教程是安装jade版的 配置Ubuntu ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS安装与卸载
1 版本选择 ROS 虽说也叫操作系统,但它是寄生在 LINUX 操作系统之下的,所以要求大兄弟你的电脑里至少要先有一个 LINUX 操作系统. 而对 ROS 兼容性最好的当属 Ubuntu 操作系统 ...
随机推荐
- Java NIO通信的基础,基于TCP C/S例子介绍
为了更好的理解Netty异步事件驱动网络通信框架,有必要先了解一点Java NIO原生的通信理论,下面将结合基于TCP的例子程序,含客户端和服务端的源码,实现了Echo流程. Java NIO的核心概 ...
- WyBox使用shell脚本检测io口是否正常
1. 修改mt7620a.dts文件,把gpio管脚复用全都定义为通用gpio /dts-v1/; /include/ "mt7620a.dtsi" / { compatible ...
- FIFO 的控制逻辑---verilog代码
FIFO 的控制逻辑---verilog代码 //fifo的例化 wire fifo_full; wire fifo_empty; : ] fifo_dout; :]rd_data_count; :] ...
- PHP代码实现3 [函数角度]
内部函数 标准函数的实现存放在ext/standard扩展目录中. php函数种类 Zend engine中的function的存在形式 123456 struct _zend_execute_dat ...
- 转:使用 Go-Ethereum 1.7.2搭建以太坊私有链
使用 Go-Ethereum 1.7.2搭建以太坊私有链 目录 [toc] 1.什么是Ethereum(以太坊) 以太坊(Ethereum)并不是一个机构,而是一款能够在区块链上实现智能合约.开源的底 ...
- WebService C#开发/调用
简单描述C#开发WebService操作步骤以及调用方式 WebService开发 第一步:创建Web空项目 第二步:为创建的Web空项目添加Web服务 第三步:实现WebService方法(仅供参考 ...
- 解决nginx转发websocket报400错误
解决nginx转发websocket报400错误 说明 由于个人服务器上面有多个项目,配置了二级域名,需要对二级域名进行转发,在转发工作这快采取了大名鼎鼎的nginx.在这之前所有的项目运行转发都没问 ...
- JS之事件机制
一.绑定事件的3种方式 1.内联绑定事件 2.on+事件名,绑定事件程序 3.通过addEventListener/removeEventListener绑定事件 不支持ie9之前的浏览器,ie9之前 ...
- go get golang.org/x 包失败解决方法
由于墙的原因,国内使用 go get安装golang 官方包可能会失败 解决方法 方法1 [不需要FQ] Win10下相关配置: GOPATH : E:\go 安装记录: E:\>go get ...
- 《Java并发编程实战》笔记-非阻塞算法
如果在某种算法中,一个线程的失败或挂起不会导致其他线程也失败和挂起,那么这种算法就被称为非阻塞算法.如果在算法的每个步骤中都存在某个线程能够执行下去,那么这种算法也被称为无锁(Lock-Free)算法 ...