图像去噪算法:NL-Means和BM3D
图像去噪是非常基础也是非常必要的研究,去噪常常在更高级的图像处理之前进行,是图像处理的基础。可惜的是,目前去噪算法并没有很好的解决方案,实际应用中,更多的是在效果和运算复杂度之间求得一个平衡,再一次验证了我老师的一句话:
好了,废话不多说,来看看效果比较好的去噪算法吧。
图像中噪声的来源有许多种,这些噪声来源于图像采集、传输、压缩等各个方面。噪声的种类也各不相同,比如椒盐噪声,高斯噪声等,针对不同的噪声有不同的处理算法。
对于输入的带有噪声的图像v(x),其加性噪声可以用一个方程来表示:
其中u(x)u(x)是原来没有噪声的图像。xx是像素集合,η(x)η(x)是加项噪声项,代表噪声带来的影响。ΩΩ是像素的集合,也就是整幅图像。从这个公式可以看出,噪声是直接叠加在原始图像上的,这个噪声可以是椒盐噪声、高斯噪声。理论上来说,如果能够精确地获得噪声,用输入图像减去噪声就可以恢复出原始图像。但现实往往很骨感,除非明确地知道噪声生成的方式,否则噪声很难单独求出来。
工程上,图像中的噪声常常用高斯噪声N(μ,σ2)N(μ,σ2)来近似表示,其中μ=0μ=0,σ2σ2是噪声的方差,σ2σ2越大,噪声越大。一个有效的去除高斯噪声的方式是图像求平均,对N幅相同的图像求平均的结果将使得高斯噪声的方差降低到原来的N分之一,现在效果比较好的去噪算法都是基于这一思想来进行算法设计。
NL-Means的全称是:Non-Local Means,直译过来是非局部平均,在2005年由Baudes提出,该算法使用自然图像中普遍存在的冗余信息来去噪声。与常用的双线性滤波、中值滤波等利用图像局部信息来滤波不同的是,它利用了整幅图像来进行去噪,以图像块为单位在图像中寻找相似区域,再对这些区域求平均,能够比较好地去掉图像中存在的高斯噪声。NL-Means的滤波过程可以用下面公式来表示:
在这个公式中,w(x,y)w(x,y)是一个权重,表示在原始图像vv中,像素 xx 和像素 yy 的相似度。这个权重要大于0,同时,权重的和为1,用公式表示是这样:
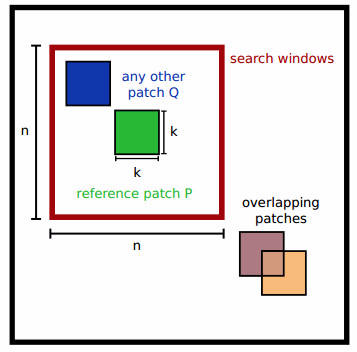
ΩxΩx是像素 xx 的邻域。这个公式可以这样理解:对于图像中的每一个像素 xx ,去噪之后的结果等于它邻域中像素 yy 的加权和,加权的权重等于 xx 和 yy 的相似度。这个邻域也称为搜索区域,搜索区域越大,找到相似像素的机会也越大,但同时计算量也是成指数上升。在提出这个算法的文献中,这个区域是整幅图像!导致的结果是处理一幅512x512大小的图像,最少也得几分钟。
衡量像素相似度的方法有很多,最常用的是根据两个像素的亮度值的差的平方来估计。但因为有噪声的存在,单独的一个像素并不可靠。对此解决方法是,考虑它们的邻域,只有邻域相似度高才能说这两个像素的相似度高。衡量两个图像块的相似度最常用的方法是计算他们之间的欧氏距离:

其中: n(x)n(x) 是一个归一化的因子,是所有权重的和,对每个权重除以该因子后,使得权重满足和为1的条件。 h>0h>0 是滤波系数,控制指数函数的衰减从而改变欧氏距离的权重。 V(x)V(x)和 V(y)V(y) 代表了像素 xx 和像素 yy 的邻域,这个邻域常称为块(Patch)邻域。块邻域一般要小于搜索区域。∥V(x)−V(y)∥22,a‖V(x)−V(y)‖2,a2 是两个邻域的高斯加权欧式距离。其中 a>0a>0 是高斯核的标准差。在求欧式距离的时候,不同位置的像素的权重是不一样的,距离块的中心越近,权重越大,距离中心越远,权重越小,权重服从高斯分布。实际计算中考虑到计算量的问题,常常采用均匀分布的权重。
讲了这么多,是时候用图来说明问题了:
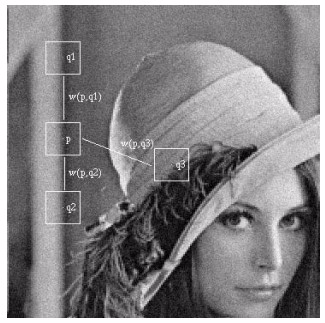
如上图所示,p为去噪的点,因为q1和q2的邻域与p相似,所以权重w(p,q1)w(p,q1)和w(p,q2)w(p,q2)比较大,而邻域相差比较大的点q3的权重值w(p,q3)w(p,q3)很小。如果用一幅图把所有点的权重表示出来,那就得到下面这些权重图:
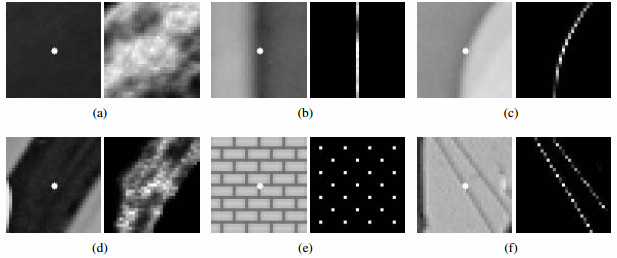
这6组图像中,左边是原图,中心的白色色块代表了像素 xx 块邻域,右边是计算出来的权重 w(x,y)w(x,y) 图,权重范围从0(黑色)到1(白色)。这个块邻域在整幅图像中移动,计算图像中其他区域跟这个块的相似度,相似度越高,得到的权重越大。最后将这些相似的像素值根据归一化之后的权重加权求和,得到的就是去噪之后的图像了。
这个算法参数的选择也有讲究,一般而言,考虑到算法复杂度,搜索区域大概取21x21,相似度比较的块的可以取7x7。实际中,常常需要根据噪声来选取合适的参数。当高斯噪声的标准差 σσ越大时,为了使算法鲁棒性更好,需要增大块区域,块区域增加同样也需要增加搜索区域。同时,滤波系数 hh 与 σσ 正相关:h=kσ,当块变大时,kk 需要适当减小。
NL-Means算法的复杂度跟图像的大小、颜色通道数、相似块的大小和搜索框的大小密切相关,设图像的大小为N×N,颜色通道数为Nc,块的大小为k×k,搜索框的大小为n×n,那么算法复杂度为:O(N2Nck2n2)。对512××512的彩色图像而言,设置k=7,n=21,OpenCV在使用了多线程的情况下,处理一幅图像所需要的时间需要几十秒。虽然有人不断基于这个算法进行改进、提速,但离实时处理还是比较远。
最后来看一下这个算法的去噪效果[3]:



BM3D(Block-matching and 3D filtering,3维块匹配滤波)可以说是当前效果最好的算法之一。该算法的思想跟NL-Means有点类似,也是在图像中寻找相似块的方法进行滤波,但是相对于NL-Means要复杂得多,理解了NL-Means有助于理解BM3D算法。BM3D算法总共有两大步骤,分为基础估计(Step1)和最终估计(Step2):
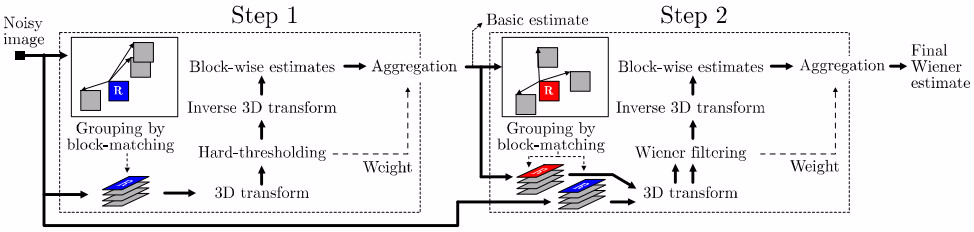
BM3D算法流程图
在这两大步中,分别又有三小步:相似块分组(Grouping),协同滤波(Collaborative Filtering)和聚合(Aggregation)。上面的算法流程图已经比较好地将这一过程表示出来了,只需要稍加解释。
(1) Grouping:有了NL-Means的基础,寻找相似块的过程很容易理解。首先在噪声图像中选择一些k×k 大小的参照块(考虑到算法复杂度,不用每个像素点都选参照块,通常隔3个像素为一个步长选取,复杂度降到1/9),在参照块的周围适当大小(n×n)的区域内进行搜索,寻找若干个差异度最小的块,并把这些块整合成一个3维的矩阵,整合的顺序对结果影响不大。同时,参照块自身也要整合进3维矩阵,且差异度为0。寻找相似块这一过程可以用一个公式来表示:

d(P,Q)代表两个块之间的欧式距离。最终整合相似块获得的矩阵就是流程图Step1中左下角的蓝色R矩阵。
(2) Collaborative Filtering:形成若干个三维的矩阵之后,首先将每个三维矩阵中的二维的块(即噪声图中的某个块)进行二维变换,可采用小波变换或DCT变换等,通常采用小波BIOR1.5。二维变换结束后,在矩阵的第三个维度进行一维变换,通常为阿达马变换(Hadamard Transform)。变换完成后对三维矩阵进行硬阈值处理,将小于阈值的系数置0,然后通过在第三维的一维反变换和二维反变换得到处理后的图像块。这一过程同样可以用一个公式来表达:

在这个公式中,二维变换和一维变换用一个T3DhardT3Dhard 来表示。γγ是一个阈值操作:
σ是噪声的标准差,代表噪声的强度。
(3) Aggregation:此时,每个二维块都是对去噪图像的估计。这一步分别将这些块融合到原来的位置,每个像素的灰度值通过每个对应位置的块的值加权平均,权重取决于置0的个数和噪声强度。
(1) Grouping:第二步中的聚合过程与第一步类似,不同的是,这次将会得到两个三维数组:噪声图形成的三维矩阵Qbasic(P)Qbasic(P)和基础估计结果的三维矩阵Q(P)Q(P)。
(2) Collaborative Filtering:两个三维矩阵都进行二维和一维变换,这里的二维变换通常采用DCT变换以得到更好的效果。用维纳滤波(Wiener Filtering)将噪声图形成的三维矩阵进行系数放缩,该系数通过基础估计的三维矩阵的值以及噪声强度得出。这一过程同样可以用一个公式来表达:

在这个公式中,二维变换和一维变换用一个T3DweinT3Dwein 来表示。wpwp是一个维纳滤波的系数:
σσ是噪声的标准差,代表噪声的强度。
(3) Aggregation:与第一步中一样,这里也是将这些块融合到原来的位置,只是此时加权的权重取决于维纳滤波的系数和噪声强度。
经过最终估计之后,BM3D算法已经将原图的噪声显著地去除。可以来看一组结果:



该算法的主要运算量还是在相似块的搜索与匹配上,在与NL-Means同样大小的相似块和搜索区域的情况下,BM3D的算法复杂度是要高于NL-Means的,应该大概在NL-Means的3倍左右。梦想着实时处理的同学可以死心了。
要比较算法效果,必然离不开评价体系。由于人带有主观因素,每个人的评价可能都不一样,因此有必要用几种客观的评价方法来对结果进行评价。目前,用得比较多的评价方式是MSE(Mean-Squared Error,均方误差)和PSNR(Peak Signal-to-Noise Ratio,峰值信噪比)。
两幅M×NM×N大小的图像u(x,y)u(x,y)和v(x,y)v(x,y)的MSE计算公式如下:

在这个公式里没有表现出像素值范围对结果的影响,同样的均方误差8-bit的图像和12-bit的图像显然没有可比性。因此,又引入了峰值信噪比:
上式中,ss 是图像像素最大值,对于8-bit的图像而言 ss=255,PSNR的单位是分贝(dB)。 通常 PSNR 值越高表示品质越好,一般而言,当 PSNR<30dB 时,代表以人的肉眼看起来是不能容忍的范围。因此大部分PSNR值都要>30dB。但PSNR高,并不代表图像质量一定好,有时候还是必须要靠人的肉眼去辅助判断图像的质量才较为正确。
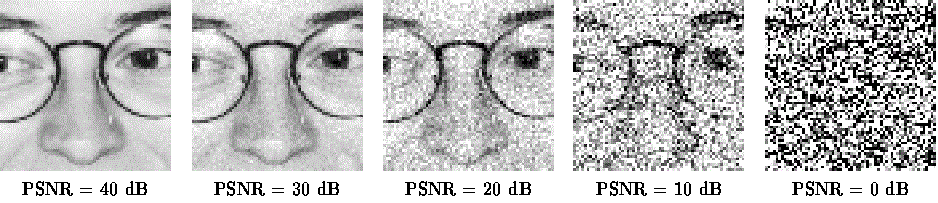
不同PSNR对应的视觉效果
我对上面两种方法获得的结果针对原图计算了PSNR,结果如下:
| NL-Means | BM3D | |
| PSNR | 32.0913 | 33.6711 |
NL-Means和BM3D可以说是目前效果最好的去噪算法,其中BM3D甚至宣称它可以得到迄今为止最高的PSNR。从最终的结果也可以看出来,BM3D的效果确实要好于NL-Means,噪声更少,能够更好地恢复出图像的细节。在效果这一点上BM3D胜。无愧于State-of-the-art这一称号。当然,这里进行测试的样本比较少,可能还不足以完全说明问题。
这两者可以说是目前最有效的图像去噪算法了,但是都不可避免地要面对一个同问题:尽管计算机性能已经成百上千倍地提高,还是远不能满足很多算法的实时计算的需求,这很大程度上限制了这些算法的使用范围:用户无法处理一张照片需要等待长达几分钟的时间,因此,距离真正意义上的实用还是有一段距离。我们只能期待,要是有一天计算机性能不再是问题,又或者,大牛们能够研究出又快又好的算法吧。
[1] Buades A, Coll B, Morel J M. A non-local algorithm for image denoising[C]//Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer Society Conference on. IEEE, 2005, 2: 60-65.
[2] Buades A, Coll B, Morel J M. Nonlocal image and movie denoising[J]. International journal of computer vision, 2008, 76(2): 123-139.
[3] Antoni Buades, Bartomeu Coll, and Jean-Michel Morel, Non-Local Means Denoising, Image Processing On Line, 1 (2011). http://dx.doi.org/10.5201/ipol.2011.bcm_nlm
[4] Jacques Froment, Parameter-Free Fast Pixelwise Non-Local Means Denoising, Image Processing On Line, 4 (2014), pp. 300–326. http://dx.doi.org/10.5201/ipol.2014.120
[5] Dabov K, Foi A, Katkovnik V, et al. Image denoising by sparse 3-D transform-domain collaborative filtering[J]. Image Processing, IEEE Transactions on, 2007, 16(8): 2080-2095.
[6] http://www.cs.tut.fi/~foi/GCF-BM3D/
[7] Marc Lebrun, An Analysis and Implementation of the BM3D Image Denoising Method, Image Processing On Line, 2 (2012), pp. 175–213. http://dx.doi.org/10.5201/ipol.2012.l-bm3d
图像去噪算法:NL-Means和BM3D的更多相关文章
- paper 132:图像去噪算法:NL-Means和BM3D
这篇文章写的非常好,确定要~认真~慎重~的转载了,具体请关注本文编辑作者:http://wenhuix.github.io/research/denoise.html 我不会告诉你这里的代码都是f ...
- SSE图像算法优化系列二十一:基于DCT变换图像去噪算法的进一步优化(100W像素30ms)。
在优化IPOL网站中基于DCT(离散余弦变换)的图像去噪算法(附源代码) 一文中,我们曾经优化过基于DCT变换的图像去噪算法,在那文所提供的Demo中,处理一副1000*1000左右的灰度噪音图像耗时 ...
- 优化IPOL网站中基于DCT(离散余弦变换)的图像去噪算法(附源代码)。
在您阅读本文前,先需要告诉你的是:即使是本文优化过的算法,DCT去噪的计算量依旧很大,请不要向这个算法提出实时运行的苛刻要求. 言归正传,在IPOL网站中有一篇基于DCT的图像去噪文章,具体的链接地址 ...
- kinect 深度图像去噪算法
算法设计思路 (1)读取16位深度图像到待处理图像帧组: (2)ROI区域计算 由于kinect 彩色摄像头和红外深度摄像头是存在视角偏差的,经过视角对齐后,得到的深度图像是有黑边的.此处通过取帧组第 ...
- ISP模块之RAW DATA去噪(二)--BM3D算法
在正式开始本篇文章之前,让我们一起回顾一下CFA图像去噪的一些基本思路与方法.接着我会详细地和大家分享自己学习理解的BM3D算法,操作过程,它的优缺点,最后会给出算法效果图供参考. 在ISP模块里,研 ...
- 数字图像去噪典型算法及matlab实现
原文地址http://jncumter.blog.51cto.com/812546/243961 图像去噪是数字图像处理中的重要环节和步骤.去噪效果的好坏直接影响到后续的图像处理工作如图像分割.边 ...
- 基于MATLAB的滤波算法
目前比较经典的图像去噪算法主要有以下三种: 均值滤波:也称线性滤波,主要思想为邻域平均法,即用几个像素灰度 的平均值来代替每个像素的灰度.有效抑制加性噪声,但容易引起图像模糊, 可以对其进行改进, ...
- paper 89:视频图像去模糊常用处理方法
随着“平安城市”的广泛建设,各大城市已经建有大量的视频监控系统,虽然监控系统己经广泛地存在于银行.商场.车站和交通路口等公共场所,但是在公安工作中,由于设备或者其他条件的限制,案情发生后的图像回放都存 ...
- opencv-9-图像噪声以及评估指标 PSNR 与SSIM
开始之前 我们在将 opencv 的图像显示在了 qt 的label 上, 我们能够将图显示在label 上, 用于显示我们的算法, 我们在 opencv 上一篇文章中介绍了 opencv 的核操作, ...
随机推荐
- TX2 之tensorflow环境部署
刷机jetpack3.3 首先TX2必须是3.3版本的jetpack,因为截止目前nvidia发布的tensorflow只支持3.3版本的jetpack,刷机的具体步骤可以参考NVIDIA Jetso ...
- 网络基础 08_NAT
1 NAT的基本概念 为什么需要NAT IPv4地址紧缺 什么是NAT NAT(Network Address Translation) 私有IPv4地址 10.0.0.0 - 10.255.255. ...
- [Re:从零开始的分布式] 0.x——Reids实现分布式锁
上节提到了,分布式锁通常应满足如下要求,互斥性.高可用.高效率.可重入.锁失效这五个基本原则.由于Redis自身“快”的特点,所以高效率可以看作满足. 下文在单机情况下与多机情况下,对利用Redis实 ...
- 【开源组件】FastDFS集群搭建与实战
FastDFS是一个轻量级的分布式文件系统,在实际生产环境往往以集群的形式部署,保证了服务的高可用.本文重点阐述FastDFS集群的搭建和项目实战. 工作流程 上传流程图 下载流程图 基本概念可参考作 ...
- unity优化测试插件推荐:内存分析,数据监控,弱网模拟
1.内存分析插件,unity官方出品 官方地址:https://bitbucket.org/Unity-Technologies/memoryprofiler 我整理的:https://downloa ...
- 关系型数据库MySQL多实例
简介 MySQL数据库是一个中小型关系型数据库管理系统,软件开发者为瑞典MySQL AB公司.在2008年1月16号被Sun公司收购后Sun公司又被oracle公司收购.目前MySQL被广泛地应用在I ...
- C 扩展库 - sqlite3 API
sqlite3 API Summary sqlite3 The database connection object. Created by sqlite3_open() and destroyed ...
- 多线程并发问题解决之redis锁
一 问题背景 我们做的是医疗信息化系统,在系统中一条患者信息对医院中当前科室中的所有诊断医生是可见的,当有一个诊断医生点击按钮处理该数据时,数据的状态发生了变化,其他的医生就不可以再处理此患者的数据了 ...
- 移动端的touchstart,touchmove,touchend事件中的获取当前touch位置
前提:touchstart,touchmove,touchend这三个事件可以通过原生和jq绑定. 原生:document.querySelector("#aa").addEven ...
- JQuery ajax-向服务器发送请求的方法
如需将请求发送到服务器,我们使用 XMLHttpRequest 对象的 open() 和 send() 方法: xmlhttp.open("GET","ajax_info ...