poj1673 EXOCENTER OF A TRIANGLE
地址:http://poj.org/problem?id=1673
题目:
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 3637 | Accepted: 1467 |
Description
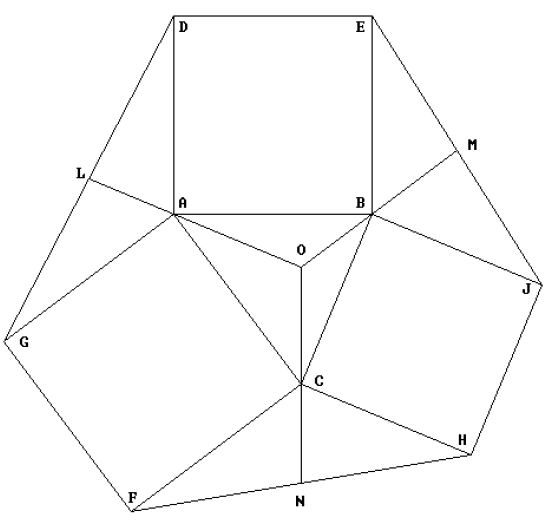
On each side of ABC, construct a square (ABDE, BCHJ and ACFG in the figure below).
Connect adjacent square corners to form the three Extriangles (AGD, BEJ and CFH in the figure).
The Exomedians of ABC are the medians of the Extriangles, which pass through vertices of the original triangle,extended into the original triangle (LAO, MBO and NCO in the figure. As the figure indicates, the three Exomedians intersect at a common point called the Exocenter (point O in the figure).
This problem is to write a program to compute the Exocenters of triangles.
Input
Output
Sample Input
2
0.0 0.0
9.0 12.0
14.0 0.0
3.0 4.0
13.0 19.0
2.0 -10.0
Sample Output
9.0000 3.7500
-48.0400 23.3600
Source
#include <iostream>
#include <cstdio>
#include <cmath>
#include <algorithm> using namespace std;
const double PI = acos(-1.0);
const double eps = 1e-; /****************常用函数***************/
//判断ta与tb的大小关系
int sgn( double ta, double tb)
{
if(fabs(ta-tb)<eps)return ;
if(ta<tb) return -;
return ;
} //点
class Point
{
public: double x, y; Point(){}
Point( double tx, double ty){ x = tx, y = ty;} bool operator < (const Point &_se) const
{
return x<_se.x || (x==_se.x && y<_se.y);
}
friend Point operator + (const Point &_st,const Point &_se)
{
return Point(_st.x + _se.x, _st.y + _se.y);
}
friend Point operator - (const Point &_st,const Point &_se)
{
return Point(_st.x - _se.x, _st.y - _se.y);
}
//点位置相同(double类型)
bool operator == (const Point &_off)const
{
return sgn(x, _off.x) == && sgn(y, _off.y) == ;
} }; /****************常用函数***************/
//点乘
double dot(const Point &po,const Point &ps,const Point &pe)
{
return (ps.x - po.x) * (pe.x - po.x) + (ps.y - po.y) * (pe.y - po.y);
}
//叉乘
double xmult(const Point &po,const Point &ps,const Point &pe)
{
return (ps.x - po.x) * (pe.y - po.y) - (pe.x - po.x) * (ps.y - po.y);
}
//两点间距离的平方
double getdis2(const Point &st,const Point &se)
{
return (st.x - se.x) * (st.x - se.x) + (st.y - se.y) * (st.y - se.y);
}
//两点间距离
double getdis(const Point &st,const Point &se)
{
return sqrt((st.x - se.x) * (st.x - se.x) + (st.y - se.y) * (st.y - se.y));
} //两点表示的向量
class Line
{
public: Point s, e;//两点表示,起点[s],终点[e]
double a, b, c;//一般式,ax+by+c=0
double angle;//向量的角度,[-pi,pi] Line(){}
Line( Point ts, Point te):s(ts),e(te){}//get_angle();}
Line(double _a,double _b,double _c):a(_a),b(_b),c(_c){} //排序用
bool operator < (const Line &ta)const
{
return angle<ta.angle;
}
//向量与向量的叉乘
friend double operator / ( const Line &_st, const Line &_se)
{
return (_st.e.x - _st.s.x) * (_se.e.y - _se.s.y) - (_st.e.y - _st.s.y) * (_se.e.x - _se.s.x);
}
//向量间的点乘
friend double operator *( const Line &_st, const Line &_se)
{
return (_st.e.x - _st.s.x) * (_se.e.x - _se.s.x) - (_st.e.y - _st.s.y) * (_se.e.y - _se.s.y);
}
//从两点表示转换为一般表示
//a=y2-y1,b=x1-x2,c=x2*y1-x1*y2
bool pton()
{
a = e.y - s.y;
b = s.x - e.x;
c = e.x * s.y - e.y * s.x;
return true;
}
//半平面交用
//点在向量左边(右边的小于号改成大于号即可,在对应直线上则加上=号)
friend bool operator < (const Point &_Off, const Line &_Ori)
{
return (_Ori.e.y - _Ori.s.y) * (_Off.x - _Ori.s.x)
< (_Off.y - _Ori.s.y) * (_Ori.e.x - _Ori.s.x);
}
//求直线或向量的角度
double get_angle( bool isVector = true)
{
angle = atan2( e.y - s.y, e.x - s.x);
if(!isVector && angle < )
angle += PI;
return angle;
} //点在线段或直线上 1:点在直线上 2点在s,e所在矩形内
bool has(const Point &_Off, bool isSegment = false) const
{
bool ff = sgn( xmult( s, e, _Off), ) == ;
if( !isSegment) return ff;
return ff
&& sgn(_Off.x - min(s.x, e.x), ) >= && sgn(_Off.x - max(s.x, e.x), ) <=
&& sgn(_Off.y - min(s.y, e.y), ) >= && sgn(_Off.y - max(s.y, e.y), ) <= ;
} //点到直线/线段的距离
double dis(const Point &_Off, bool isSegment = false)
{
///化为一般式
pton();
//到直线垂足的距离
double td = (a * _Off.x + b * _Off.y + c) / sqrt(a * a + b * b);
//如果是线段判断垂足
if(isSegment)
{
double xp = (b * b * _Off.x - a * b * _Off.y - a * c) / ( a * a + b * b);
double yp = (-a * b * _Off.x + a * a * _Off.y - b * c) / (a * a + b * b);
double xb = max(s.x, e.x);
double yb = max(s.y, e.y);
double xs = s.x + e.x - xb;
double ys = s.y + e.y - yb;
if(xp > xb + eps || xp < xs - eps || yp > yb + eps || yp < ys - eps)
td = min( getdis(_Off,s), getdis(_Off,e));
}
return fabs(td);
} //关于直线对称的点
Point mirror(const Point &_Off)
{
///注意先转为一般式
Point ret;
double d = a * a + b * b;
ret.x = (b * b * _Off.x - a * a * _Off.x - * a * b * _Off.y - * a * c) / d;
ret.y = (a * a * _Off.y - b * b * _Off.y - * a * b * _Off.x - * b * c) / d;
return ret;
}
//计算两点的中垂线
static Line ppline(const Point &_a,const Point &_b)
{
Line ret;
ret.s.x = (_a.x + _b.x) / ;
ret.s.y = (_a.y + _b.y) / ;
//一般式
ret.a = _b.x - _a.x;
ret.b = _b.y - _a.y;
ret.c = (_a.y - _b.y) * ret.s.y + (_a.x - _b.x) * ret.s.x;
//两点式
if(fabs(ret.a) > eps)
{
ret.e.y = 0.0;
ret.e.x = - ret.c / ret.a;
if(ret.e == ret. s)
{
ret.e.y = 1e10;
ret.e.x = - (ret.c - ret.b * ret.e.y) / ret.a;
}
}
else
{
ret.e.x = 0.0;
ret.e.y = - ret.c / ret.b;
if(ret.e == ret. s)
{
ret.e.x = 1e10;
ret.e.y = - (ret.c - ret.a * ret.e.x) / ret.b;
}
}
return ret;
} //------------直线和直线(向量)-------------
//向量向左边平移t的距离
Line& moveLine( double t)
{
Point of;
of = Point( -( e.y - s.y), e.x - s.x);
double dis = sqrt( of.x * of.x + of.y * of.y);
of.x= of.x * t / dis, of.y = of.y * t / dis;
s = s + of, e = e + of;
return *this;
}
//直线重合
static bool equal(const Line &_st,const Line &_se)
{
return _st.has( _se.e) && _se.has( _st.s);
}
//直线平行
static bool parallel(const Line &_st,const Line &_se)
{
return sgn( _st / _se, ) == ;
}
//两直线(线段)交点
//返回-1代表平行,0代表重合,1代表相交
static bool crossLPt(const Line &_st,const Line &_se, Point &ret)
{
if(parallel(_st,_se))
{
if(Line::equal(_st,_se)) return ;
return -;
}
ret = _st.s;
double t = ( Line(_st.s,_se.s) / _se) / ( _st / _se);
ret.x += (_st.e.x - _st.s.x) * t;
ret.y += (_st.e.y - _st.s.y) * t;
return ;
}
//------------线段和直线(向量)----------
//直线和线段相交
//参数:直线[_st],线段[_se]
friend bool crossSL( Line &_st, Line &_se)
{
return sgn( xmult( _st.s, _se.s, _st.e) * xmult( _st.s, _st.e, _se.e), ) >= ;
} //判断线段是否相交(注意添加eps)
static bool isCrossSS( const Line &_st, const Line &_se)
{
//1.快速排斥试验判断以两条线段为对角线的两个矩形是否相交
//2.跨立试验(等于0时端点重合)
return
max(_st.s.x, _st.e.x) >= min(_se.s.x, _se.e.x) &&
max(_se.s.x, _se.e.x) >= min(_st.s.x, _st.e.x) &&
max(_st.s.y, _st.e.y) >= min(_se.s.y, _se.e.y) &&
max(_se.s.y, _se.e.y) >= min(_st.s.y, _st.e.y) &&
sgn( xmult( _se.s, _st.s, _se.e) * xmult( _se.s, _se.e, _st.s), ) >= &&
sgn( xmult( _st.s, _se.s, _st.e) * xmult( _st.s, _st.e, _se.s), ) >= ;
}
}; //寻找凸包的graham 扫描法所需的排序函数
Point gsort;
bool gcmp( const Point &ta, const Point &tb)/// 选取与最后一条确定边夹角最小的点,即余弦值最大者
{
double tmp = xmult( gsort, ta, tb);
if( fabs( tmp) < eps)
return getdis( gsort, ta) < getdis( gsort, tb);
else if( tmp > )
return ;
return ;
} class triangle
{
public:
Point a, b, c;//顶点
triangle(){}
triangle(Point a, Point b, Point c): a(a), b(b), c(c){} //计算三角形面积
double area()
{
return fabs( xmult(a, b, c)) / 2.0;
} //计算三角形外心
//返回:外接圆圆心
Point circumcenter()
{
double pa = a.x * a.x + a.y * a.y;
double pb = b.x * b.x + b.y * b.y;
double pc = c.x * c.x + c.y * c.y;
double ta = pa * ( b.y - c.y) - pb * ( a.y - c.y) + pc * ( a.y - b.y);
double tb = -pa * ( b.x - c.x) + pb * ( a.x - c.x) - pc * ( a.x - b.x);
double tc = a.x * ( b.y - c.y) - b.x * ( a.y - c.y) + c.x * ( a.y - b.y);
return Point( ta / 2.0 / tc, tb / 2.0 / tc);
} //计算三角形内心
//返回:内接圆圆心
Point incenter()
{
Line u, v;
double m, n;
u.s = a;
m = atan2(b.y - a.y, b.x - a.x);
n = atan2(c.y - a.y, c.x - a.x);
u.e.x = u.s.x + cos((m + n) / );
u.e.y = u.s.y + sin((m + n) / );
v.s = b;
m = atan2(a.y - b.y, a.x - b.x);
n = atan2(c.y - b.y, c.x - b.x);
v.e.x = v.s.x + cos((m + n) / );
v.e.y = v.s.y + sin((m + n) / );
Point ret;
Line::crossLPt(u,v,ret);
return ret;
} //计算三角形垂心
//返回:高的交点
Point perpencenter()
{
Line u,v;
u.s = c;
u.e.x = u.s.x - a.y + b.y;
u.e.y = u.s.y + a.x - b.x;
v.s = b;
v.e.x = v.s.x - a.y + c.y;
v.e.y = v.s.y + a.x - c.x;
Point ret;
Line::crossLPt(u,v,ret);
return ret;
} //计算三角形重心
//返回:重心
//到三角形三顶点距离的平方和最小的点
//三角形内到三边距离之积最大的点
Point barycenter()
{
Line u,v;
u.s.x = (a.x + b.x) / ;
u.s.y = (a.y + b.y) / ;
u.e = c;
v.s.x = (a.x + c.x) / ;
v.s.y = (a.y + c.y) / ;
v.e = b;
Point ret;
Line::crossLPt(u,v,ret);
return ret;
} //计算三角形费马点
//返回:到三角形三顶点距离之和最小的点
Point fermentPoint()
{
Point u, v;
double step = fabs(a.x) + fabs(a.y) + fabs(b.x) + fabs(b.y) + fabs(c.x) + fabs(c.y);
int i, j, k;
u.x = (a.x + b.x + c.x) / ;
u.y = (a.y + b.y + c.y) / ;
while (step > eps)
{
for (k = ; k < ; step /= , k ++)
{
for (i = -; i <= ; i ++)
{
for (j =- ; j <= ; j ++)
{
v.x = u.x + step * i;
v.y = u.y + step * j;
if (getdis(u,a) + getdis(u,b) + getdis(u,c) > getdis(v,a) + getdis(v,b) + getdis(v,c))
u = v;
}
}
}
}
return u;
}
}; triangle tr;
int main(void)
{
int n;
scanf("%d",&n);
while(n--)
{
scanf("%lf%lf%lf%lf%lf%lf",&tr.a.x,&tr.a.y,&tr.b.x,&tr.b.y,&tr.c.x,&tr.c.y);
Point ans=tr.perpencenter();
printf("%.4f %.4f\n",ans.x,ans.y);
}
return ;
}
poj1673 EXOCENTER OF A TRIANGLE的更多相关文章
- POJ 1673 EXOCENTER OF A TRIANGLE(垂心)
题目链接 折腾了半天,没想出怎么证明,以前初中老师教过,不知道怎么办,就量量...受不了,怒抄模版1Y... #include <cstdio> #include <iostream ...
- POJ 1673 EXOCENTER OF A TRIANGLE(解三角形重心)
题目链接:http://poj.org/problem?id=1673 AC代码: #include<cstdio> #include<cmath> #include<a ...
- [转] POJ计算几何
转自:http://blog.csdn.net/tyger/article/details/4480029 计算几何题的特点与做题要领:1.大部分不会很难,少部分题目思路很巧妙2.做计算几何题目,模板 ...
- ACM计算几何题目推荐
//第一期 计算几何题的特点与做题要领: 1.大部分不会很难,少部分题目思路很巧妙 2.做计算几何题目,模板很重要,模板必须高度可靠. 3.要注意代码的组织,因为计算几何的题目很容易上两百行代码,里面 ...
- Soj题目分类
-----------------------------最优化问题------------------------------------- ----------------------常规动态规划 ...
- sicily 1059. Exocenter of a Trian
Description Given a triangle ABC, the Extriangles of ABC are constructed as follows: On each side of ...
- [LeetCode] Triangle 三角形
Given a triangle, find the minimum path sum from top to bottom. Each step you may move to adjacent n ...
- [LeetCode] Pascal's Triangle II 杨辉三角之二
Given an index k, return the kth row of the Pascal's triangle. For example, given k = 3,Return [1,3, ...
- [LeetCode] Pascal's Triangle 杨辉三角
Given numRows, generate the first numRows of Pascal's triangle. For example, given numRows = 5,Retur ...
随机推荐
- GIS-ArcGIS 与 ThreeJs交互联动
一.从GIS触发Three场景 MapFeatureLayer.on("click", function (evt) { graphicsLayerOfMouse.clear(); ...
- 监控之_nrpe
监控机上安装nagios插件和nrpe(nrpe添加为xinetd服务) 1.添加nagios用户 /usr/sbin/useradd nagios passwd nagios 2.安装nagio ...
- Python 练习题:统计系统剩余内存
#!/usr/bin/env python #-*- coding:utf-8 -*- ''' 统计系统内存信息 ''' with open('/proc/meminfo') as fd: for l ...
- php学习九:存取器&魔术方法
当声明属性的时候用到了private,那么的话只能本类中才能访问此属性,其他地方无法使用,这个时候需要给外界提供一些方法来使外界访问 方法一:存取器: 可以提供一个public的方法来使外界对类里面的 ...
- NSFileManager和NSFileHandle(附:获取文件大小 )
本文转载至:http://www.cnblogs.com/pengyingh/articles/2350345.html 天牛 感谢原创作者的硕果 //file 文件操作 NSFileManager ...
- element.style{}
有时在写css样式,并调试时,会出现很不可思议的现象,比如:我们定义了一个<div class=”aaa”></div>,在css中定义样式,.aaa{width:500px; ...
- 正则表达式—RegEx(RegularExpressio)(二)
今日随笔,继续写一些关于正则表达式的东西. 首先补一点昨天的内容: 昨天少说了一个贪婪模式,什么是贪婪模式,比如像+或者*这样的元字符匹配中,会以最大匹配值匹配,这句话是什么意思呢,例如: 定义一个正 ...
- windows 下,go语言 交叉编译
http://bbs.csdn.net/topics/390601048 参考上面的操作
- 查看Oracle的redo日志切换频率
1.Oracle log 每次切换会记录到告警日志中 设想写个方案来查看log切换频率来判断Oracle log是否应该更改大小. 2.sql a.查看redo日志信息 select * from v ...
- Eclipse中将Java项目转换成Web项目的方法(转)
前言: 用Eclipse开发项目的时候,把一个Web项目导入到Eclipse里会变成了一个java工程,将无法在Tomcat中进行部署运行. 方法: 1.找到.project文件,找到里面的<n ...